1.2 状态空间描述
输入输出描述
我们建立了一个描述线性系统零状态响应的数学方程。假设初始状态为零,输出只由输入决定。考虑一个SISO线性系统。
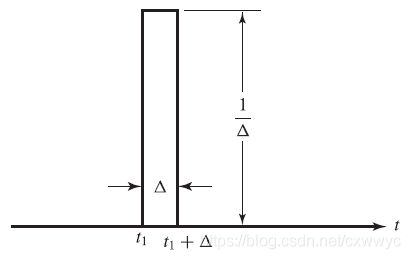
如图所示的单位脉冲信号表达式为 u ( t ) = δ Δ ( t − t 1 ) u(t)=\delta_\Delta(t-t_1) u(t)=δΔ(t−t1)。
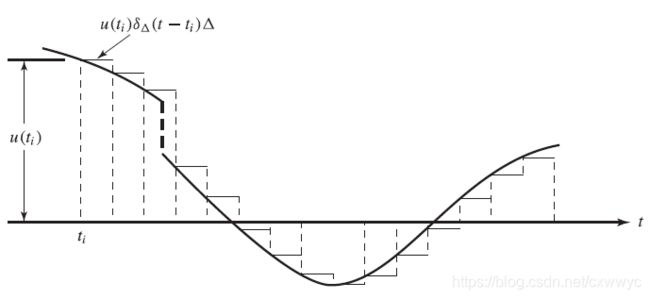
然后,每个输入 u ( t ) u(t) u(t)都可以用如图所示的一系列脉冲来近似。因此,输入 u ( t ) u(t) u(t)可以近似表示为
u ( t ) ≈ ∑ i u ( t i ) δ Δ ( t − t i ) Δ u\left( t \right) \approx \sum_i{u\left( t_i \right) \delta _{\Delta}\left( t-t_i \right) \Delta} u(t)≈i∑u(ti)δΔ(t−ti)Δ
设 g Δ ( t , t i ) g_\Delta(t, t_i) gΔ(t,ti)为施加于 t t t时刻的脉冲 u ( t ) = δ Δ ( t − t i ) u(t) =\delta_\Delta(t−t_i) u(t)=δΔ(t−ti)在 t i t_i ti的输出。于是
δ Δ ( t − t i ) → g Δ ( t − t i ) \delta _{\Delta}\left( t-t_i \right) \rightarrow g_{\Delta}\left( t-t_i \right) δΔ(t−ti)→gΔ(t−ti)
δ Δ ( t − t i ) u ( t i ) Δ → g Δ ( t − t i ) u ( t i ) Δ ( 齐 次 性 ) \delta _{\Delta}\left( t-t_i \right) u\left( t_i \right) \Delta \rightarrow g_{\Delta}\left( t-t_i \right) u\left( t_i \right) \Delta (齐次性) δΔ(t−ti)u(ti)Δ→gΔ(t−ti)u(ti)Δ(齐次性)
∑ i δ Δ ( t − t i ) u ( t i ) Δ → ∑ i g Δ ( t − t i ) u ( t i ) Δ ( 可 加 性 ) \sum_i{\delta _{\Delta}\left( t-t_i \right) u\left( t_i \right) \Delta}\rightarrow \sum_i{g_{\Delta}\left( t-t_i \right) u\left( t_i \right) \Delta} (可加性) i∑δΔ(t−ti)u(ti)Δ→i∑gΔ(t−ti)u(ti)Δ(可加性)
因此输入 u ( t ) u(t) u(t)激发的输出 y ( t ) y(t) y(t)可以近似为
y ( t ) ≈ ∑ i u ( t i ) g Δ ( t − t i ) Δ y\left( t \right) \approx \sum_i{u\left( t_i \right) g _{\Delta}\left( t-t_i \right) \Delta} y(t)≈i∑u(ti)gΔ(t−ti)Δ
现在,令 Δ \Delta Δ接近于零,则脉冲 δ Δ ( t − t i ) \delta_\Delta(t−t_i) δΔ(t−ti)变为理想脉冲 t i t_i ti,表示为 δ ( t − t i ) \delta(t−t_i) δ(t−ti),相应的输出将表示为 g ( t , t i ) g(t,t_i) g(t,ti)。当 Δ \Delta Δ接近于零时,上面公式中约等号中的变成等号,求和变成积分,离散的时间变成连续时间,可以用 τ \tau τ代替,并且 Δ \Delta Δ可以写为 d τ d\tau dτ。因此
y ( t ) = ∫ − ∞ ∞ g ( t , τ ) u ( τ ) d τ y\left( t \right) =\int_{-\infty}^{\infty}{g\left( t,\tau \right) u\left( \tau \right)}\text{d}\tau y(t)=∫−∞∞g(t,τ)u(τ)dτ
注意, g ( t , τ ) g(t,\tau) g(t,τ)是两变量的函数。第二个变量表示施加脉冲输入的时间;第一个变量表示产生输出的时间。因为 g ( t , τ ) g(t,\tau) g(t,τ)是由脉冲激励的响应,所以它被称为脉冲响应。
如果系统是因果系统,则在输入之前不会有输出。这样就有
系统是因果的 ⟺ g ( t , τ ) = 0 , t < τ \text{系统是因果的}\Longleftrightarrow g\left( t,\tau \right) =0,\ t<\tau 系统是因果的⟺g(t,τ)=0, t<τ
如果系统在 t 0 t_0 t0处的初始状态为 0 \mathbf{0} 0,则称该系统在 t 0 t_0 t0处松弛。在这种情况下, t ≥ t 0 t≥t_0 t≥t0的输出 y ( t ) y(t) y(t)只由 t ≥ t 0 t≥t_0 t≥t0的输入 u ( t ) u(t) u(t)激励。因此,可以用 t 0 t_0 t0代替积分下限。如果系统是因果的,则对于 t < τ , g ( t , τ ) = 0 t<\tau,g(t,\tau)=0 t<τ,g(t,τ)=0。因此,积分上限可以用 t t t代替。总而言之,每个在 t 0 t_0 t0处松弛的因果线性系统都可以用下面的公式来描述
y ( t ) = ∫ t 0 t g ( t , τ ) u ( τ ) d τ y\left( t \right) =\int_{t_0}^{t}{g\left( t,\tau \right) u\left( \tau \right)}\text{d}\tau y(t)=∫t0tg(t,τ)u(τ)dτ
如果线性系统有 p p p个输入和 q q q个输出,则方程可以扩展到
y ( t ) = ∫ t 0 t G ( t , τ ) u ( τ ) d τ \mathbf{y}\left( t \right) =\int_{t_0}^{t}{\mathbf{G}\left( t,\tau \right) \mathbf u\left( \tau \right)}\text{d}\tau y(t)=∫t0tG(t,τ)u(τ)dτ
其中
G ( t , τ ) = [ g 11 ( t , τ ) g 12 ( t , τ ) ⋯ g 1 p ( t , τ ) g 21 ( t , τ ) g 22 ( t , τ ) ⋯ g 2 p ( t , τ ) ⋮ ⋮ ⋱ ⋮ g q 1 ( t , τ ) g q 2 ( t , τ ) ⋯ g q p ( t , τ ) ] \mathbf{G}\left( t,\tau \right) =\left[ \begin{matrix} g_{11}\left( t,\tau \right)& g_{12}\left( t,\tau \right)& \cdots& g_{1p}\left( t,\tau \right)\\ g_{21}\left( t,\tau \right)& g_{22}\left( t,\tau \right)& \cdots& g_{2p}\left( t,\tau \right)\\ \vdots& \vdots& \ddots& \vdots\\ g_{q1}\left( t,\tau \right)& g_{q2}\left( t,\tau \right)& \cdots& g_{qp}\left( t,\tau \right)\\ \end{matrix} \right] G(t,τ)=⎣⎢⎢⎢⎡g11(t,τ)g21(t,τ)⋮gq1(t,τ)g12(t,τ)g22(t,τ)⋮gq2(t,τ)⋯⋯⋱⋯g1p(t,τ)g2p(t,τ)⋮gqp(t,τ)⎦⎥⎥⎥⎤
而 g i j ( t , τ ) g_{ij}(t,\tau) gij(t,τ)是在时间 t t t处的第 i i i个输出端处的响应,这是由于在时间 t t t处施加在第 j j j个输入端处的脉冲,在其他输入端处的输入为零。也就是说, g i j ( t , τ ) g_{ij}(t,\tau) gij(t,τ)是第 j j j个输入端和第 i i i个输出端之间的脉冲响应。因此, G \mathbf G G称为系统的脉冲响应矩阵。再次强调,这种情况下系统是线性的,在 t 0 t_0 t0处是松弛的,并且是因果的。
状态空间描述
每个线性集总参数系统都可以用以下形式的一组方程来描述
x ˙ ( t ) = A ( t ) x ( t ) + B ( t ) u ( t ) y ( t ) = C ( t ) x ( t ) + D ( t ) u ( t ) \begin{array}{c} \mathbf{\dot{x}}\left( t \right) =\mathbf{A}\left( t \right) \mathbf{x}\left( t \right) +\mathbf{B}\left( t \right) \mathbf{u}\left( t \right)\\ \mathbf{y}\left( t \right) =\mathbf{C}\left( t \right) \mathbf{x}\left( t \right) +\mathbf{D}\left( t \right) \mathbf{u}\left( t \right)\\ \end{array} x˙(t)=A(t)x(t)+B(t)u(t)y(t)=C(t)x(t)+D(t)u(t)
对于 p p p输入 q q q输出系统, u \mathbf u u是 p × 1 p×1 p×1矢量, y \mathbf y y是 q × 1 q×1 q×1矢量。如果系统有 n n n个状态变量,则 x \mathbf x x是一个 n × 1 n×1 n×1的向量。为了使方程两侧矩阵兼容, A \mathbf A A、 B \mathbf B B、 C \mathbf C C和 D \mathbf D D必须是 n × n n×n n×n、 n × p n×p n×p、 q × n q×n q×n和 q × p q×p q×p矩阵。这四个矩阵都是时间 t t t的函数。这两个方程描述的是 n n n维状态空间方程,或者简称为状态方程。对于分布式系统,维数为无穷大,不使用这两个方程描述。