视觉SLAM十四讲源码的正确打开方式:第3讲 三维空间刚体运动
当你下定决心开始学习SLAM时,看到《视觉SLAM十四讲》的你是否欣喜若狂?
当你学完理论知识准备在实践章节大显身手时,发现源码完全不会跑的你又是否一脸懵逼?
不要怕!
和李哈哈一起刷夜,我们一起康康每讲的实践部分,到底怎么玩。
写在前面的话
和很多初学SLAM的小伙伴一样,我对SLAM、对Linux,甚至对C++都不清楚
看了看SLAM十四讲感觉突然有点感觉的时候,实践部分又完全无从下手
针对以上这种情况,我决定将自己完成实践部分作业的过程分享出来
希望那些和我一样刚开始学习SLAM的小伙伴,能够与我产生共鸣
如果对你能有一丢丢帮助,⚽️观众老爷们点个赞
其他各讲实践索引
你可以从这里直接跳转到其他讲的实践讲解:
视觉SLAM十四讲源码的正确打开方式:第1讲 预备知识
视觉SLAM十四讲源码的正确打开方式:第2讲 初识SLAM
视觉SLAM十四讲源码的正确打开方式:第3讲 三维空间刚体运动
李哈哈视觉SLAM十四讲源码的正确打开方式:第4讲 李群和李代数
实践3.2:Eigen
把从GitHub上下载的源码打开,把其中的ch3文件夹拷贝到桌面
如果不知道源码在哪里/怎么下载,可以从索引查看第1讲的内容
我习惯将需要用到的文件拷贝到桌面或桌面的某个文件夹进行测试
本节将讲解如何使用Eigen表示矩阵和向量,在下一节的实践引申至旋转矩阵与变换矩阵的计算。
本节的代码在ch3/useEigen中
Eigen 是一个 C++ 开源线性代数库。它提供了快速的有关矩阵的线性代数运算,还
包括解方程等功能。许多上层的软件库也使用Eigen进行矩阵运算,包括 g2o、Sophus 等。
安装Eigen
安装Eigen的方法书上写的直接用就没啥问题(我就是这么装的)
终端输入:
sudo apt-get install libeigen3-dev
Eigen的头文件默认位置为"/usr/include/eigen3",可以命令行输入以下指令查看电脑安装的位置:
sudo updatedb
locate eigen3
作者提到,Eigen的特殊支出在于,它是纯用头文件搭建起来的库(一般的库应该有头文件&库文件)
所以,在使用时,只需要引入Eigen的头文件,而不需要链接库文件
编译工程
说到这一步,我就来精神了昂!
从何说起呢?
很久很久之前,当我开心地打开ch3这个文件夹,以为简单的编译运行就能跑了
然而这个文件的结构完全让我不知所措
最关键的是,书上写的用来指导编译这个程序的CMakeList.txt只有一句话:
include_directories("/usr/include/eigen3")
但是我打开的CMakeList.txt长这个样子:
cmake_minimum_required(VERSION 2.8)
project(useEigen)
set(CMAKE_BUILD_TYPE "Release")
set(CMAKE_CXX_FLAGS "-O3")
# 添加Eigen头文件
include_directories("/usr/include/eigen3")
add_executable(eigenMatrix eigenMatrix.cpp)
更离谱的是,ch3里边有四个实践的文件夹:

刚刚提到的CMakeList.txt是useEigen这个文件夹里的,外边居然还有一个CMakeList.txt!
这和我在第2讲看到的工程结构完全不一样啊!
直觉告诉我,作者把一整讲的所有源码都放在了一起,用最外层的CMakeList.txt统一调度
后来看来确实如此
看到这里的时候,我果断停下滚去学CMake了
学习的成果在这里:(这篇文章我觉得自己写的还是不错的,起码花里胡哨的)
CMake自学记录,看完保证你知道CMake怎么玩!!!
非常希望大家粗略的看一下上文,找到里边提到的教程自己做做demo试试看
毕竟迟早要学的嘛
学成归来,开始编译工作,我的方法是在根目录创建一个build文件夹,用来存放编译生成的中间文件:(根目录就是打开ch3之后所在的地方)

以useEigen目录为例,此时该目录文件如下:
在build目录下打开终端,使用编译指令:
cmake ..
该指令后边的两个.是指对上一级目录进行cmake
此时build目录下生成了useEigen目录,其内容如下:

之后我们仍在build目录下,使用编译指令:
make
这时build目录下的useEigen目录如下:
可以看到生成了可执行文件eigenMatrix
至此运行前的编译准备过程就完成了
简单说一下这两个指令在干嘛
cmake:根据CMakeList.txt的内容生成编译文件CMakeFiles
make:根据CMakeFiles以及源文件生成可执行文件
由于我们创建了一个build文件夹,所以编译的中间文件及生成的可执行文件保存在了buil目录下
这样说可能不是完全正确,因为我对在build目录下编译的原理还不是很清楚,后续搞懂了回来填坑
应该要再创建一个bin目录来把可执行文件放进去统一管理,但这里先不考虑这个了,抓住主要矛盾就好啦
运行useEigen
使用./命令来运行二进制可执行文件,具体运行方法可以输入以下指令:
./useEigen/eigenMatrix
在命令行中输入指令效果如下:
 关于代码的讲解可以参照这篇还不存在的文章
关于代码的讲解可以参照这篇还不存在的文章
实践3.2:Eigen
师傅别念了,已经在写了啦
关于本节的代码,我加了一丢丢注释,贴在下边啦:
#include ,即三维向量
Vector3d v_3d; //注意这里的元素是double类型哦,这里的d表示double,改为f就是float
// 这是一样的
Matrix<float, 3, 1> vd_3d;
// Matrix3d 实质上是 Eigen::Matrix result_wrong_type = matrix_23 * v_3d;
// 应该显式转换
Matrix<double, 2, 1> result = matrix_23.cast<double>() * v_3d;
cout << "[1,2,3;4,5,6]*[100,2,1]=" << result.transpose() << endl;//此时列向量v_3d第一个元素是100
Matrix<float, 2, 1> result2 = matrix_23 * vd_3d;
cout << "[1,2,3;4,5,6]*[4,5,6]: " << result2.transpose() << endl;
// 同样你不能搞错矩阵的维度
// 试着取消下面的注释,看看Eigen会报什么错
// Eigen::Matrix result_wrong_dimension = matrix_23.cast() * v_3d;
// 一些矩阵运算
// 四则运算就不演示了,直接用+-*/即可。
matrix_33 = Matrix3d::Random(); // 随机数矩阵
cout << "random matrix: \n"
<< matrix_33 << endl;
cout << "transpose: \n"
<< matrix_33.transpose() << endl; // 转置
cout << "sum: " << matrix_33.sum() << endl; // 各元素和
cout << "trace: " << matrix_33.trace() << endl; // 迹
cout << "times 10: \n"
<< 10 * matrix_33 << endl; // 数乘
cout << "inverse: \n"
<< matrix_33.inverse() << endl; // 逆
cout << "det: " << matrix_33.determinant() << endl; // 行列式
// 特征值
// 实对称矩阵可以保证对角化成功
SelfAdjointEigenSolver<Matrix3d> eigen_solver(matrix_33.transpose() * matrix_33);
cout << "Eigen values = \n"
<< eigen_solver.eigenvalues() << endl;
cout << "Eigen vectors = \n"
<< eigen_solver.eigenvectors() << endl;
// 解方程
// 我们求解 matrix_NN * x = v_Nd 这个方程
// N的大小在前边的宏里定义,它由随机数生成
// 直接求逆自然是最直接的,但是求逆运算量大
Matrix<double, MATRIX_SIZE, MATRIX_SIZE> matrix_NN = MatrixXd::Random(MATRIX_SIZE, MATRIX_SIZE);
matrix_NN = matrix_NN * matrix_NN.transpose(); // 保证半正定
Matrix<double, MATRIX_SIZE, 1> v_Nd = MatrixXd::Random(MATRIX_SIZE, 1);
clock_t time_stt = clock(); // 计时
// 直接求逆
Matrix<double, MATRIX_SIZE, 1> x = matrix_NN.inverse() * v_Nd;
cout << "time of normal inverse is "
<< 1000 * (clock() - time_stt) / (double)CLOCKS_PER_SEC << "ms" << endl;
cout << "x = " << x.transpose() << endl;
// 通常用矩阵分解来求,例如QR分解,速度会快很多
time_stt = clock();
x = matrix_NN.colPivHouseholderQr().solve(v_Nd);
cout << "time of Qr decomposition is "
<< 1000 * (clock() - time_stt) / (double)CLOCKS_PER_SEC << "ms" << endl;
cout << "x = " << x.transpose() << endl;
// 对于正定矩阵,还可以用cholesky分解来解方程
time_stt = clock();
x = matrix_NN.ldlt().solve(v_Nd);
cout << "time of ldlt decomposition is "
<< 1000 * (clock() - time_stt) / (double)CLOCKS_PER_SEC << "ms" << endl;
cout << "x = " << x.transpose() << endl;
return 0;
}
我觉得这里主要列举了Eigen表示矩阵或向量及基本运算的一些方法
后面可以回来看看这里的东西,感觉只有真的手撕起来才知道怎么玩
实践3.6:Eigen几何模块
3.6.1 Eigen几何模块的数据演示
这一节的实践展示了一些几何模块:旋转矩阵、旋转向量、欧拉角、四元数的Eigen代码实现
用这几种旋转方式旋转一个向量v,最后获得了一样的结果
这里不太想看源码具体怎么实现的了,以后用的时候再回来学习补充
把作者告诉我们的注意事项说一下:
程序代码通常和数学表示有一些细微的差别,比如运算符重载
我们可以在程序中直接计算四元数和三维向量的乘法,但是数学上应把向量转化为虚四元数再相乘
代码运行结果如下:

3.6.2 实际的坐标变换例子
在这一节作者给了我们一个实际的坐标变换的例子
简单来说就是已知两个位姿信息和一个位姿下某点的坐标信息,来求另一个位姿下该点的坐标
具体的问题描述就看书吧,我就不用重新打一遍了吧嘻嘻
而打开源代码,发现头都大了
这一节的代码完全没有注释!!!
不要怕,我把我注释好的放在这里,供大家食用:
#include 基本上代码怎么回事看我的注释和代码就完全没问题了
一定好好看注释啊亲人们
当然细心的你应该已经发现了,我同时写了四元数求解和变换矩阵的求解结果,结果如下:
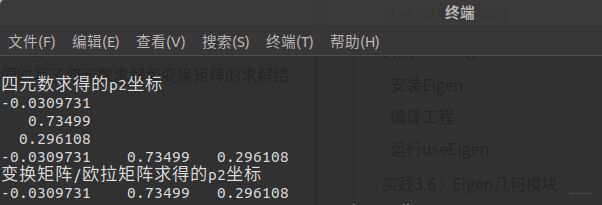
可以看到,二者的结果完全相同
非常有必要的是,你要看看这里的公式推导,戳下边的链接哦:
视觉SLAM十四讲 3.6.2 实际的坐标变换例子代码解析
实践3.7 可视化演示
3.7.1 显示运动轨迹
后边这两节实践还没搞清楚,贴出来演示效果图吧:
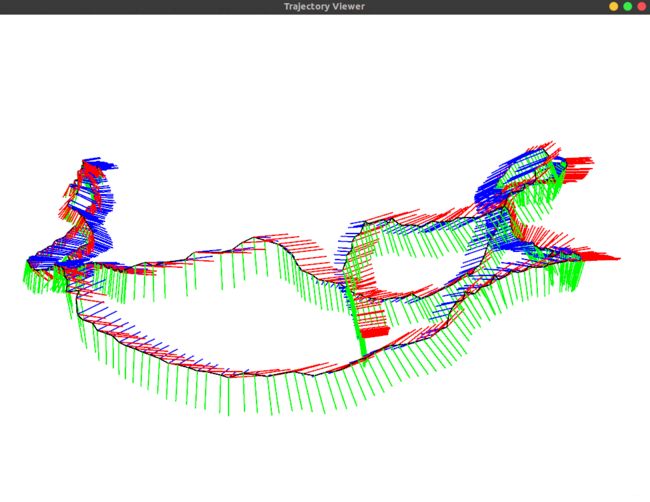
这是很有成就感的一张图,开心!
但是这个程序在运行时遇到了一个bug
直接运行可执行文件,我这里会出现如下的错误:
 报错信息为:
报错信息为:
cannot find trajectory file at ./example/trajectory.txt
可以理解为程序找不到这个路径下的这个.txt文件
问题就出在该程序的源文件上,也就是基本的.cpp文件,其内部有如下的一句代码:
string trajectory_file = "./examples/trajectory.txt";
他没有在这个路径下找到这个保存有轨迹信息的文件,所以产生了错误
我感觉问题来源应该是我们创建了build文件夹并在里边编译的原因
我的解决办法是直接把文件的完整路径放进去,如下所示:
//这里是一个坑,要把完整路径写上去哦
// path to trajectory file
string trajectory_file = "/home/lihaha/桌面/ch3/examples/trajectory.txt";
这样再运行就没问题啦!
3.7.2 显示相机的位姿
 如果你都看到这里了,那说明你一定是个有水平的小可爱
如果你都看到这里了,那说明你一定是个有水平的小可爱
优秀的人都喜欢点赞哦,亲人们给个赞吧,这对我很重要!!!