“泰迪杯”挑战赛-通过图像处理和数据挖掘实现车辆检测与跟踪
目 录
-
挖掘目标
-
分析方法与过程
2.1. 总体流程
2.2. 具体步骤
2.3. 结果分析 -
结论
-
参考文献
1. 挖掘目标
在建设平安城市的进程中,安全是政府日常管理工作中的重要任务。随着城市报警和监控系统的建设,对于监控数据的分析也日显重要。
本次建模的目标:利用基于机器视觉的车辆检测、跟踪技术以及图像处理技术,对道路监测系统中车辆压双黄线的视频图像进行处理和综合分析,从中得到所需要的事件、信息及数据,实现对道路上突发的车辆压双黄线交通事件进行实时检测,减少交管部门人工排查违章投入。
交通监控视频分析主要涉及到以下几个大类:目标的检测(包括运动目标的检测以及静止目标的检测,比如:双黄线的检测等)、目标的分类、运动目标的跟踪、目标行为的描述等几个大方向。基于竞赛组委会提供的分析数据,通过前面提及的几类大分析,得出视频数据中关于车辆目标压双黄线等的核心结论。这对城市道路建设以及交通管理都具有重要指导意义。
2. 分析方法与过程
2.1. 总体流程
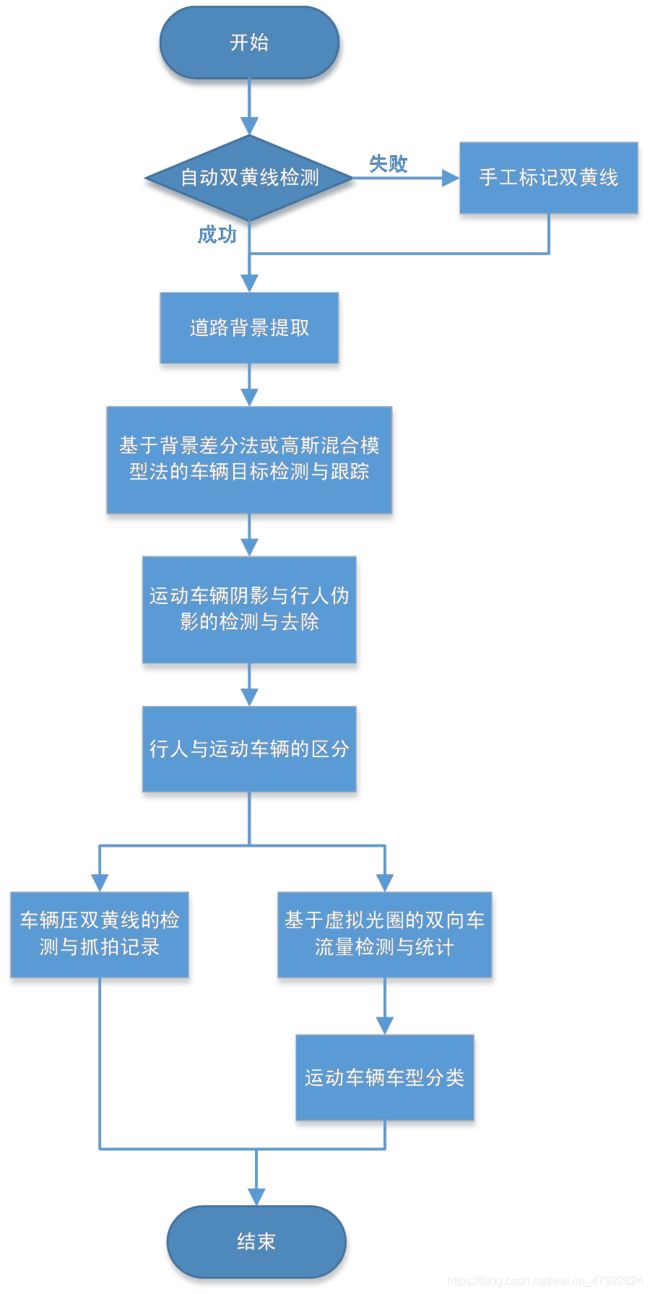
研究分析监控视频主要包括以下几个步骤:
步骤一:交通监控视频中双黄线的自动检测标志;
步骤二:基于背景帧差法以及高斯混合模型法的车辆目标检测;
步骤三:车辆阴影的检测与去除;
步骤四:人与车辆目标的区分以及人的伪影去除;
步骤五:车辆压双黄线检测处理;
步骤六:基于虚拟光圈的双向车流量检测;
步骤七:车型的初步判断。
2.2. 具体步骤
2.2.1 车辆压双黄线检测技术特点分析
在设计一个智能分析系统对道路监控视频中运动车辆压双黄线进行检测前,我们需
要对系统设计过程中,需要解决的核心技术问题进行思路梳理:
(1)基于机器视觉的车辆检测、跟踪技术以及图像处理技术;
(2)着重需要解决以下几个方向性的问题:
①准确对研究对象进行检测与跟踪
②对车辆在阳光下行驶过程中产生的阴影进行去除
③区分好行人与研究对象:运动车辆
④可适当增加双向车流量的统计功能
以上几个方面是车辆压双黄线检测的核心技术问题。
2.2.2 视频图像预处理
现实中,成像系统获取的图像(即原始图像)由于受到种种条件限制和随机干扰,图像特征的多样性和复杂性对图像的分析和处理造成了困难。因此,为便于后续对图像的特征进行提取,提高图像识别的准确度,基于此,我们在对图像进行真正的分析前,还需对视频图像数据进行预处理。图像预处理的主要目的是消除图像中无关的信息,恢复有用的真实信息,增强有关信息的可检测性和最大限度地简化数据,从而改进特征抽取、图像分割的可靠性。
(1)图像滤波平滑去噪
图像平滑的主要目的是减少图像噪声。图像噪声产生的原因有很多,主要是因为系统外部和内部的干扰。系统外部干扰主要是电磁波干扰,内部干扰主要是摄像机热噪声、抖动噪声等。实际拍摄的图像或者视频中都含有很多噪声。图像处理中的常见噪声主要有以下几种:加性噪声、乘性噪声、量化噪声、“椒盐噪声”;交通视频监控中常用到的图像滤波方法主要有均值滤波[11-13]和中值滤波。本文采用的是均值滤波。
2.2.3 道路双黄线自动提取标记
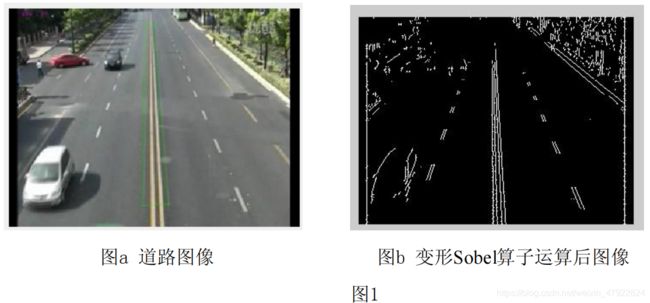
对交通道路的双黄线自动提取标记进行设计时,本文根据城市道路图像中双黄线区域的特征,用变形 Sobel算子加大双黄线区域纹理,分割出图像中双黄线区域粗略位置;应用最大类间方差和数学形态学方法求出满足纹理条件区域的二值图像,从而得到双黄线区域准确位置。
(1) 用变形Sobel算子加大双黄线区域纹理
一般的图像模板算子定义为设给定图像f (x,y) 大小N×N,模板D(i,j) 大小m×m(m为奇数),g(x,y) 为用模板和图像相关运算后的结果,使模板中心D((m-1)/2,(m - 1)/2)与f(x ,y)对应,则
g ( x , y ) D ⋅ f ( x , y ) = ∑ j = 0 m − 1 ∑ i = 0 m − 1 D ( i , j ) f ( x + i − m − 1 2 , y + i − m − 1 2 ) g(x,y) D \cdot f(x,y)=\sum_{j=0}^{m-1} \sum_{i=0}^{m-1} D(i,j)f(x+i- \frac{m-1}{2},y+i- \frac{m-1}{2}) g(x,y)D⋅f(x,y)=j=0∑m−1i=0∑m−1D(i,j)f(x+i−2m−1,y+i−2m−1)
标准的Sobel模板算子定义D 为

标准的Sobel模板算子通常是用于检测图像中因为灰度变化而产生的边缘。如果使用标准的Sobel模板算子对道路图像进行运算,只能够得到双黄线区域外侧和内侧的细小边缘,要通过这些边缘的信息得到图像中双黄线区域位置是很困难的。为此定义一种变形Sobel模板D:D(i,j)大小m×n (m为奇数),n-2 >1,使模板中心D((m-1)/2,n-1)与f(x,y)对应,并对图像进行相关运算。
g ( x , y ) D ⋅ f ( x , y ) = ∑ j = 0 m − 1 ∑ i = 0 n − 1 D ( i , j ) f ( x + i − m − 1 2 , y + i − ( n − 1 ) ) g(x,y) D \cdot f(x,y)=\sum_{j=0}^{m-1} \sum_{i=0}^{n-1} D(i,j)f(x+i- \frac{m-1}{2},y+i- (n-1)) g(x,y)D⋅f(x,y)=j=0∑m−1i=0∑n−1D(i,j)f(x+i−2m−1,y+i−(n−1))
设图像中双黄线位置的三个小区域的宽度相等,并且宽度为w,取n=w+2 ,[w/2]+2,[w/4 ]+2;如果递归地多次使用新定义的变形Sobel算子对图像进行模板运算,双黄线区域特征不仅不会消失,而且在运算后会得到更清晰、更有规律的双黄线区域纹理特征图像。用上面定义运算得到的道路双黄线区域纹理特征情况如图1所示。
(2)双黄线区域二值图像的获
设如果道路中车辆密集,遮挡住了黄线区域,这样的图像不能用来提取双黄线位置。根据图像用新模板运算后产生的双黄线区域纹理特征,可以粗略地确定出双黄线所在位置,不满足纹理特征的图像区域,则可以认为是噪声区域,而在进一步的处理中不需要再考虑。把满足纹理条件的原灰度图像区域分割出来,对分割出的原灰度图像区域使用动态全局二值化方法求出它的二值图。在此综合使用P-参数法和最大类间方差求出全局阈值。P-参数法是根据对象物体在图像中所占的面积比率,将灰度直方图中面积比率为p%的点作为阈值。最大类间方差方法依据是背景和物体之间类间方差最大,而背景之间以及物体之间的类内方差最小。设图像f(x,y) (x = 1 m;y = 1 n),Hk为灰度直方图(k= 0 255),则最大类间方差方法阈值计算公式如下:
s u m = ∑ x = i m ∑ y = i n f ( x , y ) d o t s = m n a = ∑ k = 0 g k ⋅ H k b = ∑ k = 0 g H k t 1 = b ⋅ d o t s − b ⋅ b t 2 = s u m ⋅ b − d o t ⋅ a t = t 1 t 2 t 1 ⋅ d o t s ⋅ d o t s sum = \sum_{x=i}^{m} \sum_{y=i}^{n} f(x,y) \\ dots = mn \\ a = \sum_{k=0}^{g}k \cdot H_k\\ b = \sum_{k=0}^{g} H_k\\ t_1 = b \cdot dots - b \cdot b\\ t_2=sum \cdot b - dot \cdot a t=\frac{t_1 t_2}{t_1 \cdot dots \cdot dots} sum=x=i∑my=i∑nf(x,y)dots=mna=k=0∑gk⋅Hkb=k=0∑gHkt1=b⋅dots−b⋅bt2=sum⋅b−dot⋅at=t1⋅dots⋅dotst1t2
计算g从1~255 时,找出最大的t的值,这就是阈值。这样计算出的二值图像(图2)还存在很大的噪声,进一步根据双黄线区域形态特征,运用数学形态学办法对二值图像进行多次腐蚀和膨胀运算,可以很好地去除图像中不满足双黄线区域特征的噪声点,最终得到的二值化图像效果如图3所示。
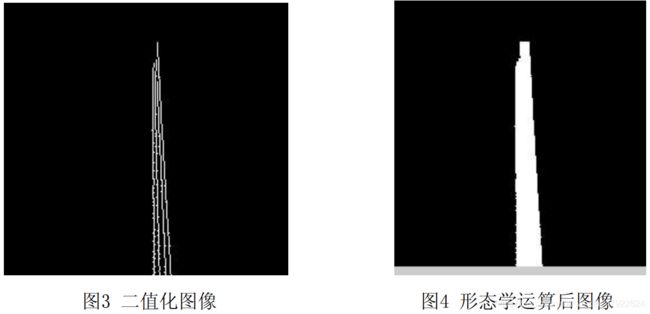
(3)统计优化二值图像,确定双黄线区域
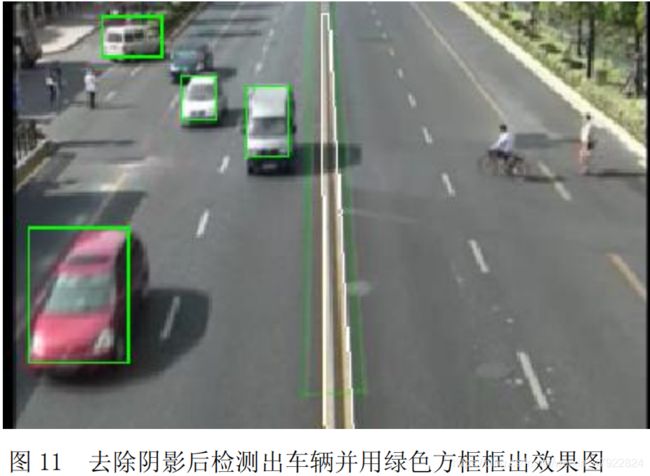
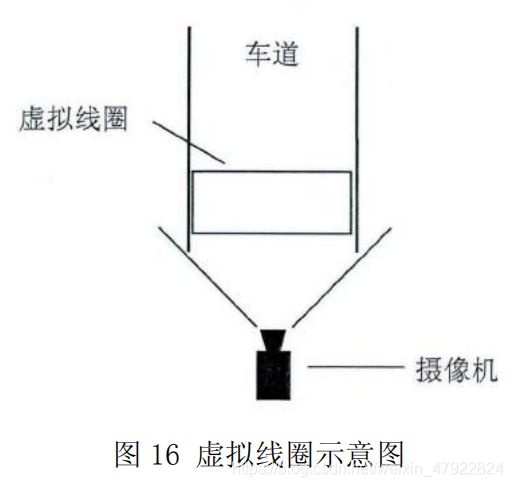
在实际监控中,路面图像双黄线位置是静止不动的,而车辆本身和阴影等噪声干扰是随机出现的。设连续采集到一批道路二值图像数目 S,统计 S 个二值图像中对应的每个像素点颜色出现次数,取颜色出现次数阈值 p(p g ( x , y ) = { 1 ∑ k = 1 s f k ( x , y ) ≥ p 0 ∑ k = 1 s f k ( x , y ) < p g(x,y)= \begin{cases}1\ \sum_{k=1}^{s} f_k(x,y)\ \geq p\\ 0\ \sum_{k=1}^{s} f_k(x,y)\ < p \end{cases} g(x,y)={ 1 ∑k=1sfk(x,y) ≥p0 ∑k=1sfk(x,y) <p 图4表示的是经过自动提取并标记后的图像双黄线区域。实际结果表明求出的双黄线区域效果良好。 试验表明,本方法有很强的适应性。整个算法只是对道路的灰度图像进行处理,可适用于各种天气和阳光照射情况;并且算法速度快,能很快找出道路图像中双黄线位置。 在识别出图像中双黄线的位置后,只需要监视在双黄线区域是否有车辆进入。当车辆闯入双黄线区域,抓拍当时的现场情况,保存违章图像,这样就能够很好地在无人执勤时,对不按线行驶的车辆进行监控。 背景差分的基本原理就是利用两帧图像之间的差来判断物体的出现和运动,背景差分法用序列中的每一帧与一个固定的静比参考帧(不存在任何运动物体)做图像差。这种方法的优点是位置精确、速度快,满足实时处理的要求,因为它只需要获取当前的一幅图像。 (1)背景估计 背景估计有很多方法,本系统采用效果较好且效率相对较高的均值法,即任意像素点的背景信息由序列图像中对应像素点颜色的均值来确定,如下式所示。 B ( i , j ) = 1 N ∑ k = 0 N − 1 I k ( i , j ) B(i,j) = \frac{1}{N} \sum_{k=0}^{N-1} I_k(i,j) B(i,j)=N1k=0∑N−1Ik(i,j) (1)背景更新 D K ( i , j ) = ∣ I K ( i , j ) − B K ( i , j ) ∣ D_K(i,j)=|I_K(i,j) - B_K(i,j)| DK(i,j)=∣IK(i,j)−BK(i,j)∣ 对背景进行更新: B K + 1 ( i , j ) = { α I K ( i , j ) + ( 1 − α ) B K ( i , j ) , D B K ( i , j ) = 0 B K ( i , j ) , 其 他 B_{K+1}(i,j)= \begin{cases} \alpha I_K(i,j)+(1- \alpha)B_K(i,j), DB_K(i,j) = 0\\ B_K(i,j),\ 其他 \end{cases} BK+1(i,j)={ αIK(i,j)+(1−α)BK(i,j),DBK(i,j)=0BK(i,j), 其他 实验证明: 上式中 α 取 0.1 时效果比较好,即表明在新的背景中,原来的背景占有 90%的比例,这一点也是符合实际的,背景之间的变化只能是渐变的,所以在相邻的背景之间有着很大的相似性,利用上面这种动态的背景更新方法,可以获得比较理想的结果。 这种方法虽然在开始时要损失一段时间,用中值法来进行背景抽取,但是在得到理想背景的条件下,用二值背景差分图像来更新,可以减少计算量,确保系统的实时性。 (2)阈选取技术 对于不同光线背景下的差分图像,用固定的阈值 T 去进行二值化显然不能对每一帧图像都达到很好的效果。希望得到的阈值不仅可以将日标从背景中分离出来,而且要能根据不同的图像来智能地选取。1978 年提出的 Otus 法以其计算简单、稳定有效而一直广为使用。由于车辆交通图像内容不太复杂、灰度分布较集中,所以本系统采用了 Otus阈值化技术,以简化阈值的选取。Otus 方法的基本思想:选取的最佳阈值 T 应当使得不同类间的分离性最好 1)计算图像的直力一图统计结果,得到灰度值为 k 的频率 P H S ( k ) P_{HS}(k) PHS(k)为 P H S ( k ) = 1 M × N ∑ f ( i , j ) = k 1 P_{HS}(k)= \frac{1}{M \times N} \sum_{f(i,j)=k} 1 PHS(k)=M×N1∑f(i,j)=k1 2)计算图像的灰度均值 μ T \mu _T μT 为 3)计算灰度类均值 μ ( S ) \mu (S) μ(S)和类直方图之和 ω ( S ) \omega(S) ω(S) 为 μ ( S ) = ∑ k = 0 s k × P H S ( k ) \mu_(S) = \sum_{k=0}^{s} k \times P_{HS}(k) μ(S)=k=0∑sk×PHS(k) 4)计算类分离指标为 最后,求出使 σ B \sigma_B σB达到最大的值 s,则最佳阈值 T=s。 如图 6 所示的差分图像经过计算得到的一值化处理的阈值为 T=35。Otus 法求阈值不管图像的直方图有无明显的双峰,都能得到较满意的结果,这种方法是个全局阈值自动选择的最优方法。 在车辆违章检测中,由于阴影和被测目标粘连,导致阴影容易被误认为运动目标的一部分,而对运动目标的检测产生不利的影响、因此阴影分割是保证对运动目标检测准确性的前提、 在车辆违章检测中,由于阴影和被测目标粘连,导致阴影容易被误认为运动目标的一部分,而对运动目标的检测产生不利的影响。因此,阴影分割是保证对运动目标检测准确性的前提。常见的阴影分割方法有:①基于 HSV 色彩空间变换的阴影分割。该方法没有确定性的阴影模型,容易损坏目标的几何特性,并且运算量很大不利于不能实现自适应阴影抑制。②基于阴影特征的阴影分割方法。该方法是基于点处理的,检测的阴影区域可能有多处分布,而且容易产生孔洞,运算量也较大。为了同时兼顾阴影分割的可靠性与实时性,本文采用基于彩色检测线线间差分的阴影分割方法。 在实际检测系统中,摄像机一般固定在公路的正上方,摄像头方向为前下方,因此在短时间内,摄像机获取的图像序列中,车辆阴影的方向是确定的,所以可根据阴影方向对车辆所在运动区域建立车辆-阴影模型。根据产生阴影的经验情况可确定阴影相对于车辆的方向有下方、上方、左方、右方、(为单向的车辆阴影模型,即车辆和阴影间只有 1 条分界线)左上方、右下方、左下方、右下方(为双向的车辆阴影模型,即车辆和阴影间有 2 条分界线)8 种。由于高于背景亮度的车辆的灰度值远大于车辆阴影的灰度值,所以选择高亮度车辆形成的运动区域来做模型判决,以提高判决的准确性。因此,找到分界线便可完成阴影消除。 (2)车辆阴影模型的判断 由于本文针对车辆压双黄线检测,只需考虑车辆左右两侧阴影对检测的影响,所以本文以单向左侧的车辆阴影模型为例说明阴影消除方法。要消除阴影影响关键是找到阴影与车辆边缘的分界线,又由于摄像机一般倾斜向前下方,拍摄运动目标存在畸变性,导致阴影与车辆的分割线是倾斜的。如图 7、8。 2)计算目标区域左边一小块阴影区的饱和度方差 Qs 和亮度方差 Qr。同时计算背景图像上对应两条检测线处所有像素灰度的均值μ 和方差 q。 3)由于阴影与车体像素间的强度 V、色彩饱和度 S 差别较大,当两条保持一定间距的检测线先后由阴影区进入车体后,可以借助检测线上的像素点在 HSV 空间中的特征信息搜索到车辆与阴影的跳变点。假设两条检测线为 a1、a2,则 a1、a2 从左边起第 i 个像素的强度和色彩饱和度分别为 V a 1 i , S a 1 , V a 2 i , S a 2 V_{a_{1i}}, S_{a_{1}},V_{a_{2i}}, S_{a_{2}} Va1i,Sa1,Va2i,Sa2 初始 i=1。其流程图如图 9。 4)两检测线上的像素间的亮度和饱和度的绝对差值 Dv 和 Ds 由公式计算得到: 若 Dv>kQs(k 为乘积因子)时,检测线在像素处出现了强度跳变,第四步判断跳变由 Cf 公式来确定,R 为车道线标志,R=1 表示跳变是由阴影区车道线引起的,则 i 不能作为阴影和车辆的分界点,R=0 表示该跳变有效,t 为像素数临界值。F 为区分标志,F=1 表示像素两边是两个强度不同的区域,因此是分界点,F=0 则表示跳变为干扰或误判;g 为乘积因子;P 为区域长度。 对于一些像素特征值与阴影非常相似的车辆(比如深黑色车辆),可以计算检测线两端一定数量的像素均值,然后从左向右在检测线上找一个像素值等于该均值的像素点,将该点看作分界点,两条检测线可以得到 A、B 两分界点,连接两分界点得到车辆阴影分割线,用搜索 A 分界点的方法可以搜索另一 B 分界点。 研究者指出:上述基于彩色检测线的线间差分阴影消除方法,由于利用了检测线在HSV 空间的颜色特性,参考了检测线在灰度空间中的背景图像,因此不但噪声抑制性强,而且也提高了低亮度车辆的阴影消除效果,增强了阴影消除的稳定性。同时,本文所应用的方法主要是对检测线和方向线等几条线上的像素进行处理,因此还具有良好的实时性,该方法具有较高的可靠性和较好的实时性。 根据已由程序代码智能检测分析出的区域,找到包含这些区域的最小矩形,并将像素面积小于一定阈值的跟踪对象就此忽略,比如可将阈值 T 设为 100;接着,再根据运动车辆与(行)人的高宽比存在差异,以此来区分(行)人与运动车辆,本文中,暂且忽略掉高与宽之比大于 2 的区域(本文默认为(行)人的区域)。 下图 12 是分析软件中没勾选“去除行人”功能选项时,软件分析的效果图;而图13 是勾选了“去除行人”分析功能后得出的效果图: 对道路监控视频中运动车辆进行压双黄线检测,是本文设计的核心内容。 (1)车辆压黄线违章检测算法——车辆中心检测方法 (2)车辆压黄线违章检测算法——灰度帧差统计方法 (3)结果分析 研究学者将灰度帧差统计法与车辆中心检测方法作比较,发现:在不同的条件下车辆压黄线违章检测的结果又有很大不同。 灰度法帧差统计法对图像的质量要求低,在图像清晰度很差的情况下,灰度帧差统计法可以取得较好的效果。可以检测大多数的车辆压黄线违章事件,但是对于阴影敏感,因此本文采用基于彩色检测线的线间差分的阴影消除方法对目标车辆的阴影进行消除。车辆中心检测方法未考虑阴影对图像产生的影响,因此检测的准确性不高。图 14 为图像处理的效果图。 双向车道车流量检测与车型判断的核心技术主要基于“虚拟线圈”的检测统计方法。交通流量是指在选定时间段内通过道路某一地点、某一断面或某一车道的交通实体数。 本文实现了统计一段时间内的车道流量和不同车型的车流量信息。针对图像采集设备的安装角度、高度不同等情况,在视频中的车道位置设置与车道方向相垂直的虚拟线圈,即划定检测区域。车流量统计就是通过判断是否有车辆经过检测区域并计数。统计检测区域的阈值,并和预先设定的阈值比较。大于阈值,表示有车辆通过检测区域,车流量加 1。 虚拟线圈一般设置在图像的中下部,与车道方向垂直,如图 16 所示。因为摄像机的角度和高度决定了视野的远近。图像的中下部对应视野较近的情况,车体面积较大,车辆信息量丰富。并且,此位置车辆间的距离较大,在一定程度上解决了车辆遮挡问题。虚拟线圈的高度为普通车长,宽度与车道宽度一致。虚拟线圈的个数由车道数目决定。在多车道的情况下,各个虚拟线圈独自工作,分别记录对应车道的车流量。所有车道的车流量之和便是总车流量。 (1)车流量检测 (2)车型判定 通过累加器数值,判断车辆在虚拟线圈内停留的时间,从而判断车辆类型。所以,需要设定两个阂值 N1, N2,对车型进行判断。当累加器数值小于 N1时,判定为小型车,大于 N2时,判定为大型车,位于两者之间时,判定为中型车。 根据中国汽车分类标准(GB9417-89)中客车的划分方法,将车辆按照车身长度划分为四类:大型车(10 米以上);中型车(7-10 米);小型车(3.5-7 米);微型车(不超过 3.5米)。道路交通车辆主要包括轿车、面包车、公交车、大巴、货车等。在实现时,在上述标准的基础上,将小型车和微型车归为一类,将车辆划分中了大、中、小三种车型。小型车主要包括轿车、面包车,中型车包括公交车,大型车包括大巴。有学者指出:结合实际拍摄视频和所设定的线圈高度进行统计分析,线圈高度对累加器的影响不大。对于不同车型通过虚拟线圈时,累加器变化情况总结如下:小型车小于 25,中型车小于 65。 N 1 = 25 , N 2 = 65 N_1 = 25, N_2= 65 N1=25,N2=65。程序界面如图所示。 (3)总结分析 ①车型判断的功能对于交通视频的其他主题分析也起到了十分积极的影响,比如在做以下主题分析时:社会车辆进入公交专用线的检测。很多城市划定了公交专用线,在给定的时间段内社会车辆不得进入。构造有效的特征来分类特定时段间公交专用线(例如 BRT 专线、桥梁上的公交专用线等)内的公交车和社会车辆,其中一个有效的特征是车辆的类型,即车型分析。 ②从车流量的大小可以判定交通的拥挤状况,从而决定采取何种交通管理措施。因此对交通量的准确检测在交通工程中占有十分重要的位置。 上述各个具体步骤中,包含有该步骤的总结分析,是对这一步骤所进行的具体操作的试验结果的总结分析;对于整体的效果而言,本文设计的软件基本上达到了预期的检测期望,不过由于时间仓促,软件仍有细节需要在接下来的时间里继续完善,比如:车流量的漏检(包括进一步准确地将人与车辆进行区分等)、车型的判断需进一步地细化区分标准。倘若有机会,希望可以在答辩时,向各位评委老师展开进一步完善后的程序设计效果。 在建设平安城市的进程中,安全是政府日常管理工作中的重要任务。随着城市报警和监控系统的建设,对于监控数据的分析也日显重要。 本文利用基于机器视觉的车辆检测、跟踪技术以及图像处理技术,对道路监测系统中车辆压双黄线的视频图像进行处理和综合分析,在分析过程中,本文对所涉及的运动目标检测与跟踪、背景提取、阴影去除以及车辆统计等核心技术均进行了(代码)实现。 在进行核心的技术分析,即车辆压双黄线检测时,我们首先需要面对的问题是:黄线在哪里?我们必须准确无误地将道路监控视频中的双黄线标记出来;当然,由于摄像机机位一般都是固定的,所以交通标志线在场景中的位置不变,我们大可以人工的方式标记出标志线所在的区域,然后做碰撞检测。在此基础上,本文对自动标记双黄线进行了研究,在干扰因素不多的情况下,自动标记技术经试验证明其可满足实际应用的要求。 此外,在判断车辆压双黄线并进行抓拍记录时,我们还面对一个错检率的问题,即如何准确区分车辆是否压双黄线。在众多造成智能分析出错的因素中,车辆阴影对于压双黄线的误判影响巨大。基于此,我们还必须解决另一个十分关键的技术:车辆的阴影去除。本文运用的是基于 HSV 颜色空间变换的阴影消除算法,该算法去除阴影效果良好,在利用本文设计软件分析样本数据时,该算法表现出其优越性,大大降低了误判率。 当然,造成智能分析误判运动目标压双黄线的另一个问题:行人的干扰。行人也作为运动目标出现在道路监控视频中,其对智能分析系统造成误判干扰的一个很重要的因素也是“阴影”问题,即人及其伪影会形成一个较大的粘结范围,从机器视觉的角度看,其实际的形状已被扩大,从而对分析系统造成极大的影响;基于此,解决办法的着手点仍是对行人的伪影进行去除,接着利用行人的固有性质,即行人的宽高比与车辆的宽高比不同,从而达到对行人与运动车辆进行目标分类的目的。经分析试验,本文的设计效果良好。 对于以下主题分析:a)行人检测。有些路段是禁止行人入内的,如高架桥、高速公路等。当系统检测到有行人入内时报警;能构造行人的有效特征,并对行人与其他运动目标进行分类,是实现这一主题分析的一个很重要的方面。 最后,智能交通系统(ITS)已经被科学家认为是解决当前城市交通问题最有效的方法,也是目前和未来交通发展的主流方向。ITS 的前提是获得交通道路的实时信息,比如车流量、车型等。鉴于此,本文设计的软件还实现了双向车流量以及车型判断的功能;这对多类交通视频主题的分析也起到了十分积极有利的作用,比如在做以下主题分析时:b)社会车辆进入公交专用线的检测。很多城市划定了公交专用线,在给定的时间段内社会车辆不得进入。构造有效的特征来分类特定时段间公交专用线(例如 BRT 专线、桥梁上的公交专用线等)内的公交车和社会车辆,其中一个有效的特征是车辆的类型,即车型分析。 展望: [1]KAMIJO S, MATSUSHITA Y, IKEUCHI K, M, etal.Traffic monitoring and accident detection at intersections [J].IEEE Transactions on Intelligent Transportation Systems,2000,1(2):108-118 [2]Mohnhaupt M, Neumann B, On the use of motion concepts for top-down control in traffic scenes[C]∥Proc.Eur. Conf. Computer Vision, Antibes,France,1990:598-600 [3]Zhang Dong-Ping, Fu Ping, Li Jiang ,et al.Traffic peccancy processing system based on image recognition[C].IEEE Proceedings of Intelligent Transportation System,2003,1200-1205 [4]周建同.交通违章行为的识别及检索[C]∥全国智能视频监控学术会议,2003 [5]冯海军.基于特写检测的多方向电子警察系统的开发[D].西安:西安电子科技大学,2004 [6]王琳.智能交通系统中关键技术的研究[D].西安:西安电子科技大学,2004 [7]郭怡文、袁飞虎.基于背景差分的多车道车流量检测系统[C].电光与控制第 17 卷 第 9 期,2010.9 [8]曹中华、谢旭升、周定康.一种城市道路双黄线识别方法[C].计算机应用研究,2004 第七期:243-244 [9]熊金艳、李 鸿.改进的灰度帧差统计法对车辆违章压黄线的检测[C].工业制计算机 2013 年第 26 卷第 5 期:113-116 [10]墨芹.运动车辆视频检查与车流量检检测方法的研究[D.湖南:中南大学,2012 [11] X. M. Zhang, Y L. Xiong. Impulse noise removal using directional difference based noise detector and adaptive weighted mean filter[J]. Signal Processing Letters, 2009, 16(4): 295-298. [12]易子麟,尹东,胡安洲,张荣.基于非局部均值滤波的 SAR 图像去噪[J].电子与信息学报,2012, 34(4): 950-955. [13] Y L. Xiong. Impulse noise removal using directional difference based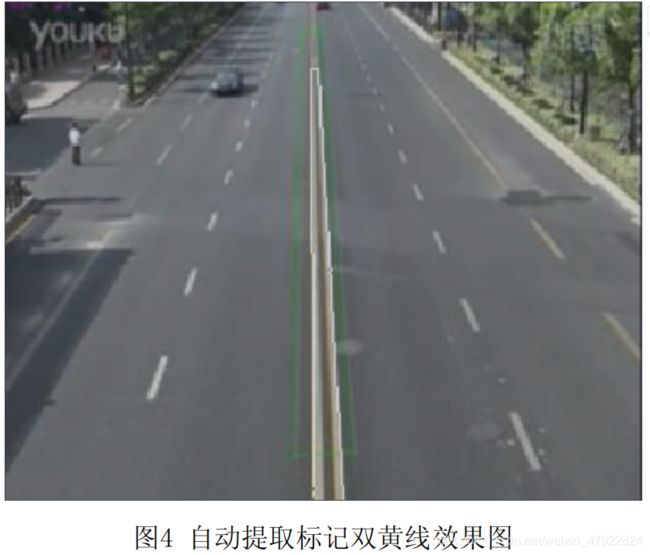
(4)总结分析2.2.4 道路背景提取
背景差分法是最常用、最有效的交通视频处理模式,而背景估计正是背景差分法的基础和核心环节。采用背景差分法进行运动检测,先要对背景进行准确的估计,再用当前图像和背景图像进行差分运算,并对差分图像进行区域分割,提取出运动区域。车辆交通序列图像间有很强的相关性,仅仅利用单帧的信息进行处理容易产生错误,更好的方法是联合多帧的信息进行分析。基于这一思想,可以根据各个坐标处像素值在整个序列中的统计信息对运动场景的背景进行抽取。
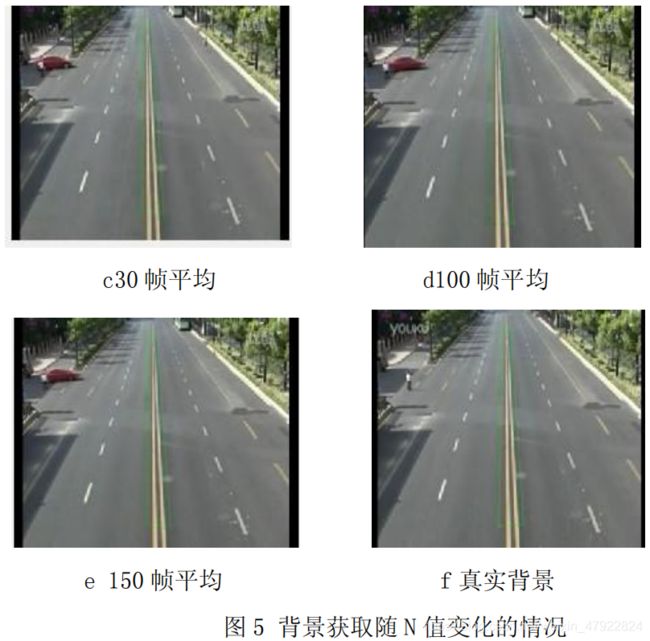
N 取值越大合成背景越好 但实际上随着时间推移,光线不断变化,再考虑到时间因素,N 取 100~200 就比较合适了。2.2.5 运动车辆提取
由于环境光线在不断地变化,要准确检测出运动车辆,需要及时对背景进行更新获得初始图像以后,接下来就是在获得初始图像的基础上进行背景更新。通过计算当前帧和背景帧的差值,得到当前背景差分图像 D K ( i , j ) D_K(i,j) DK(i,j),有
。
对于灰度级为 0~255,M×N 的一幅图像,记 f(i,j)力为图像点(i,j)力处的灰度值。Otus 法具体步骤:
μ T = ∑ k = 0 255 k × P H S ( k ) \mu_T = \sum_{k=0}^{255} k \times P_{HS}(k) μT=k=0∑255k×PHS(k)
ω ( S ) = ∑ k = 0 s P H S ( k ) \omega(S)=\sum_{k=0}^{s}P_{HS}(k) ω(S)=k=0∑sPHS(k)
σ B = [ μ T × ω ( s ) − μ ( s ) ] 2 ω ( s ) [ 1 − ω ( s ) ] \sigma _B=\frac{[\mu_T \times \omega(s)- \mu (s)]^2}{\omega (s)[1- \omega(s)]} σB=ω(s)[1−ω(s)][μT×ω(s)−μ(s)]2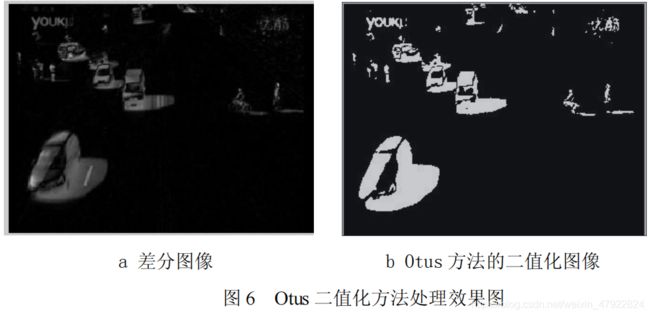
2.2.6 运动车辆的阴影去除
(1)基于彩色检测线线间差分的目标区域的阴影分割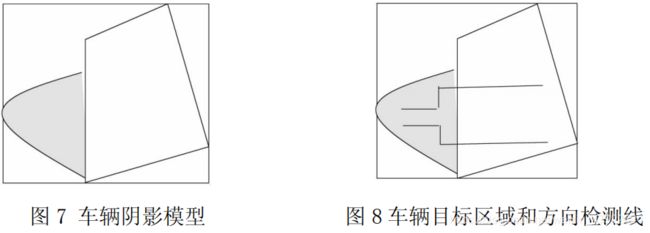
1)在目标区域内从阴影方向(左侧)任意确定两条检测线向右搜索,搜索过程中,需要增大两检测线间距离,到接近右边框搜索终止。
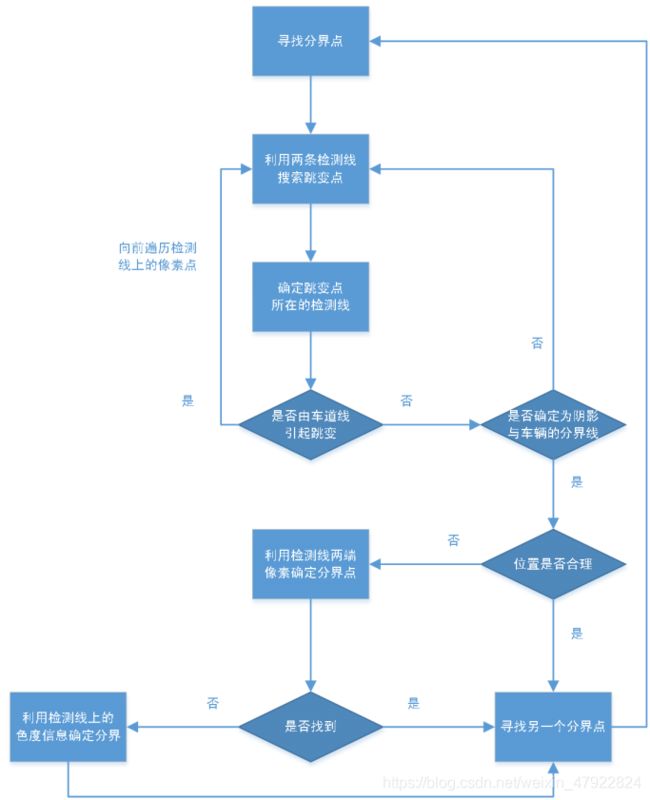
D v = ∣ V a 1 i − V a 2 i ∣ D s = ∣ S a 1 − S a 2 ∣ D_v=|V_{a_{1i}} - V_{a_{2i}}| \\ D_s=|S_{a_{1}} - S_{a_{2}}| Dv=∣Va1i−Va2i∣Ds=∣Sa1−Sa2∣

2.2.7 运动车辆与行人的区分


2.2.8 车辆压双黄线违规抓拍记录
文献[4]中提出了一种通过检测车辆中心位置,并根据车的中心位置与黄线的距离来判断是否有压黄线。该方法可以有效的检测压黄线违章,对压线违章的识别率高于90.09%,虚惊率低于 9.01%。但是,还是存在车辆检测准确率不高、计算复杂,在克服天气变化、复杂环境及周围车辆的影响等方面存在不足。
这里借鉴车辆闯红灯违章检测[5-6]的方法,首先求得前后帧或与背景帧差,然后统计灰度变化点个数,最后判断如果灰度变化点个数大于设定门限,则认为有车辆压黄线违章。考虑到压黄线违章检测特殊性,这里我们的对抓拍到的图像进行在感兴趣区域逐行求灰度平均,并以此灰度平均代表该行处的黄线状态;然后比较如果前后帧(或与背景帧)之间逐行灰度平均之差大于预先设定阈值,则认为该行处黄线残缺;再统计黄线连续残缺的最长长度,以此长度作为是否有车辆压黄线的依据;最后判断如果黄线残缺最长长度大于预设阈值,则认为有车压黄线违章,抓拍。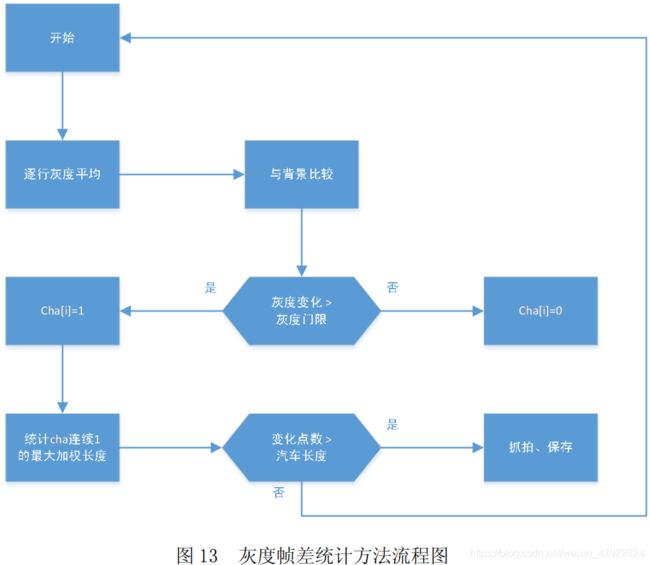
参照图 13,采用灰度帧差统计方法主要步骤如下:
1)捕捉图像,对感兴趣区域逐行求灰度 G 平均
2)与背景比较,如果灰度变化△G 大于阈值认为黄线有残缺,Cha[i]=1;
3)统计 Cha[i]连续为 1 最长加权长度 Max Length;
4)判断如果 Max Length 大于设定阈值,则判定为有车压黄线,抓拍;
5)背景更新,而对于背景法是通过背景更新算法更新、维持的系统当前背景 。在结合基于彩色检测线的线间差分的阴影消除方法的基础上,可以有效的克服阴影的影响。这种方法可以快速、有效地检测车辆压黄线违章。
2.2.9 双向车道车流量检测与车型判断
在图像中设置虚拟线圈,通过检测虚拟线圈中的变化,可检测出车流量。

理想状态下,即不考虑车辆骑线行驶,虚拟线圈存在四种状态:
1、检测区域没有车辆通过
2、检测区域从无车到有车,表示有车辆驶入;
3、检测区域从有车到有车,表示该车辆未驶出检测区;
4、检测区域从有车到无车,表示车辆驶出检测区。
只需要在车辆驶入或者驶出检测区域计数即可。


当车辆经过虚拟线圈时,软件将跟踪车辆的绿色框框变为蓝色,以显示车辆通过虚拟光圈。2.3 结果分析
3. 结论
(1)对于本文设计的分析小软件,其仍有待完善的细节,在接下来的时间,将对其进行进一步的完善,以求其能达到更好的实用性;
(2)在条件允许的情况下,还可以对违规车辆进行车牌号的提取,这一举措,更有利于交通管理部门的后续管理工作。4. 参考文献
noise detector and adaptive weighted mean filter[J]. Signal Processing Letters, 2009,16(4): 295-298.