三维模型重建的流程:
三维点云获取——几何结构恢复——场景绘制
三维点云获取:
1.激光雷达
2.微软Kinect
有效距离比较短
3.单目多视角 :几乎很难实时
4.双目立体视觉
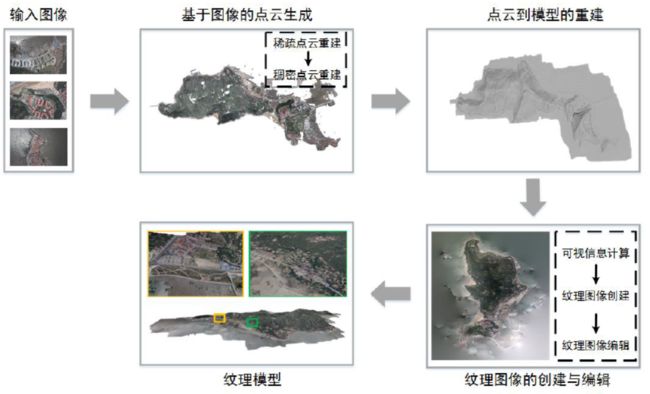
基于图像的三维模型重建:
1.输入图像
2.基于图像的点云生成
3.点云到模型的重建
4.纹理图像的创建与编辑
5.纹理模型
相关商业软件:
Acute3D,Altizure,Agisoft PhotoScan
图像特征点应用:
1.相机标定
2.图像拼接
3.稠密重建
4.场景理解
图像特征点的检测方法:
- 人工设计检测算法
- 基于深度学习的方法
- 场景中的人工标记点
图像特征点的基本要求:
1.差异性——可检测
特征点应该呈现出区别于非特征点的明显特征
2.重复性——可匹配
对应同一三维点的特征点应该在不同视角中被重复检测到
特征检测子(Feature Detector)
- Harris 角点检测
- 基于LoG的多尺度特征检测子//拉普拉斯的高斯
- 基于DoG的多尺度特征检测子//高斯差分的一种方法
- 快速特征点检测方法
特征点具有局部差异性
动机:特征点具有局部差异性
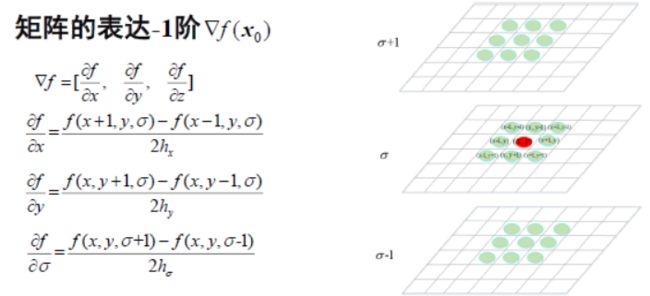
图像梯度
Harris矩阵
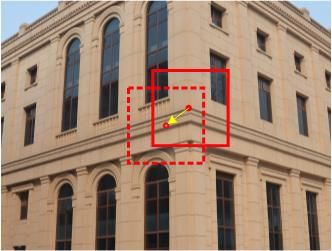
以每个点为中心取一个窗口,窗口大小为5 5或者77,如果这个点具有差异性,往周围任意方向移动,周围的环境变化都是会比较大的,如果满足这个特性,我们就认为这个特征点具有明显的局部差异性。在工事中,I表示像素,如果是 彩色图像就是RGB,灰色图像就是灰度。(u,v)表示方向。然后对上式进行一阶泰勒展开。
Harris矩阵H的特征值分析:
矩阵特征值反应了两个垂直方向的变化情况,一个事变化最快的方向,一个事变化最慢的方向
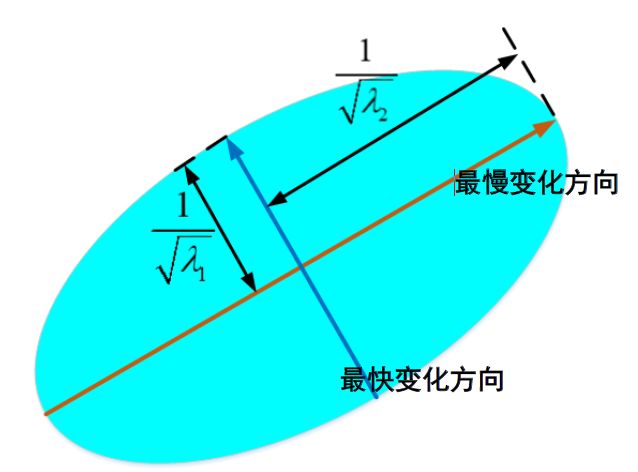
所以检测特征的任务转化为计算Harris矩阵,判断特征值大小。
在实际操作中,很少通过计算特征值来判断,因为计算特征值计算量比较大,取而代之的是Harris角点准则。
Harris角点准则
行列式值为特征值相乘,行列式的迹为特征值相加
- K的值越小,检测子越敏感
- 只有当和同时取得最大值时,C才能取得较大值
- 避免了特征值分解,提高计策计算效率
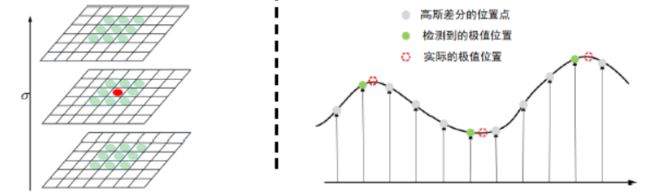
非极大值抑制
在特征点附近,其他点的响应也比较大。
所以选取局部响应最大值,避免重复检测
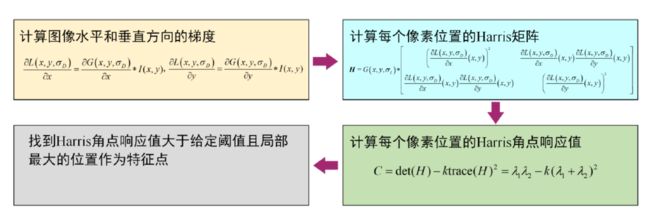
Harris 角点检测
算法流程
- 计算图像水平和垂直方向的梯度
但是在计算梯度之前,需要对图像进行滤波,一般进行高斯平阀,避免出现变化剧烈的值 - 计算每个像素位置的Harris矩阵
- 每个角点的响应值
- 非极大值抑制
Harris角点检测一般用于快速检测,比如视频里面的跟踪
基于LoG的特征检测子
动机:Harris角点检测不具有尺度不变性
LoG算子:Lindeberg(1993)提出Laplacian of Gaussian
(LoG)函数的极值点对应着特征点
Lindeberg(1993)提出Laplacian of Gaussian
(LoG)函数的极值点对应着特征点
尺度空间:
对于一幅图像,用不同大小的滤波核进行滤波,一般用高斯滤波,得到一系列图像,这些图像就称之为尺度空间。然后把这些图像摞起来


尺度归一化LoG算子:
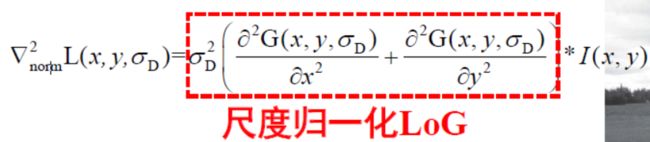
- 不同尺度下的LoG响应值不具有可比性
- 构建尺度空间,同时在位置空间和尺度空间寻找归一化LoG极值(极大值/极小值)点作为特征点
LoG特征检测算法流程

LoG特征检测效果好,但是计算量比较大。
工程中也很少用。为了更好地利用LoG的性质,提出了一种近似的算法:基于DoG的特征检测子
LoG可以由DoG近似:
Lowe(2004)提出LoG近似等价于相邻尺度的高斯差分(DoG)
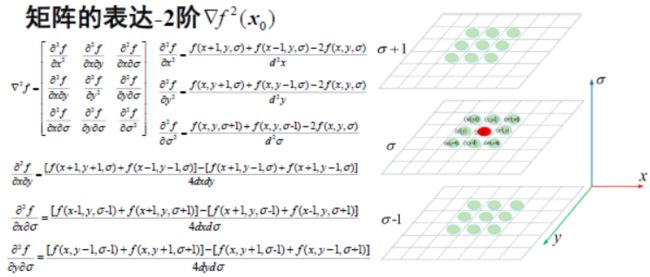
高斯空间:
高斯差分(DoG)
尺度空间构建
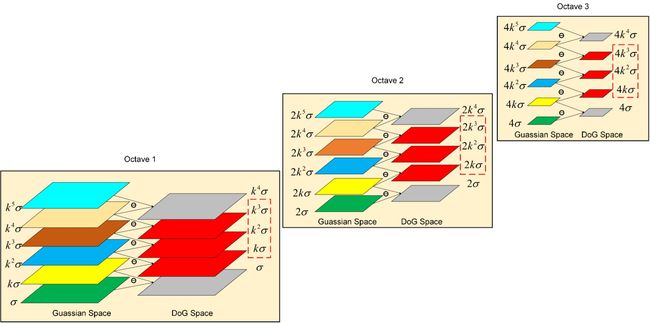
上图为3个Octive,每个octive的尺寸都会减小一半。
上图每个Octive中,左侧为高斯空间,相邻高斯空间做差得到DoG空间
特征点检测为在三维空间上做一个极值的比较,(三维空间为图像的二维空间+尺度的空间),必须需要两个方向有极值。在高斯差分,边界上的两层是无效的,只有中间的红色区域是有效的。
在Octive,
if 每阶有效差分数 S =3,则高斯空间层数为N = S+3
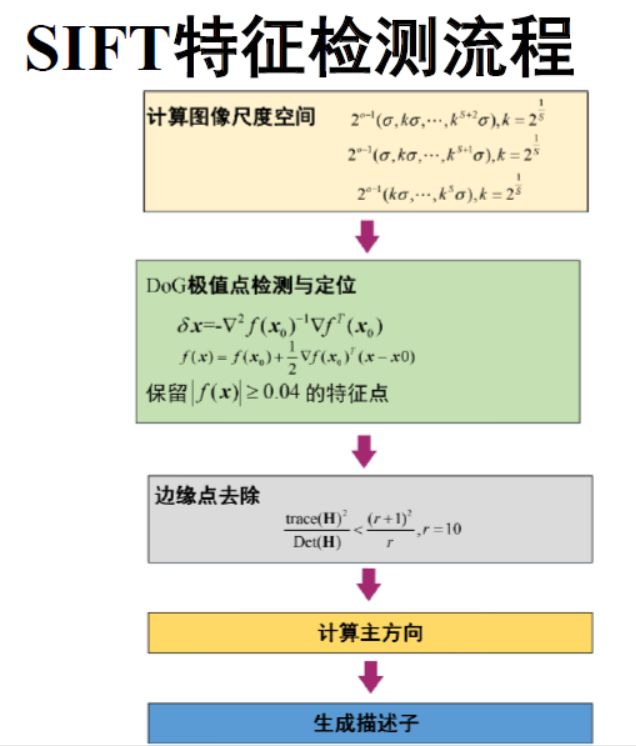
特征点位置确定:
在位置和尺度空间组成的三维空间中寻找极值点
亚像素特征点位置确定:
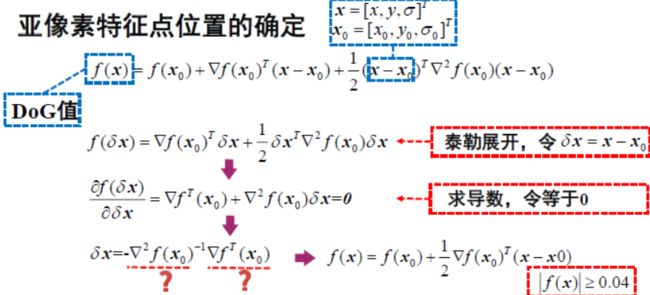
除去边缘点:
DoG在边缘处值较大,需要避免检测到边缘点
计算主方向
通过统计梯度直方图的方法确定主方向,使算法具有旋转不变性

旋转 不变性、 尺度 不变性 、亮度 变化 不变性 ,对视角变化、 仿射 变换有一定程度的稳性
SIFT特征点非常稳定和鲁棒,但是计算量很大,对于要求稳定的图像建模可以采用。
针对实时要求比较高的应用提出了快速特征检测。
快速特征检测
FAST特征点(Feature from Accelerated Segment Test)
通过检测局部像素灰度变化来确认特征点的位置
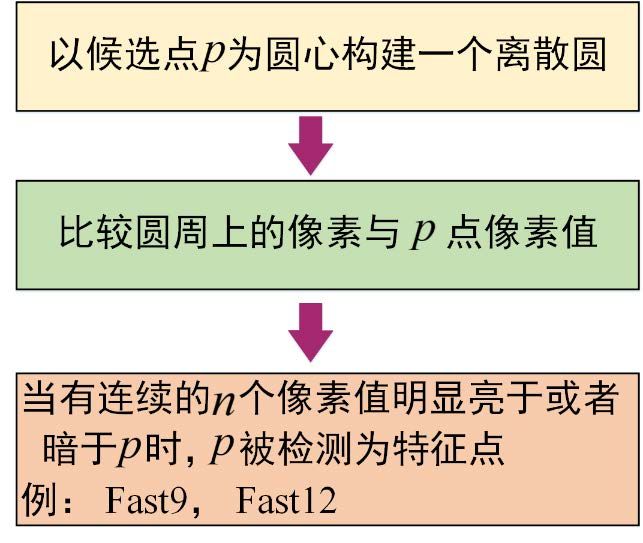
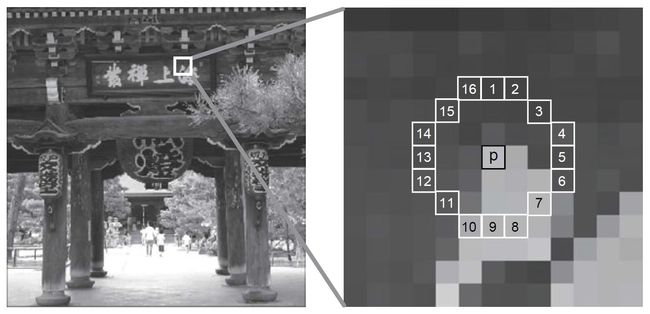
速度快,SIFT的一百倍,不具有尺度和旋转不变性
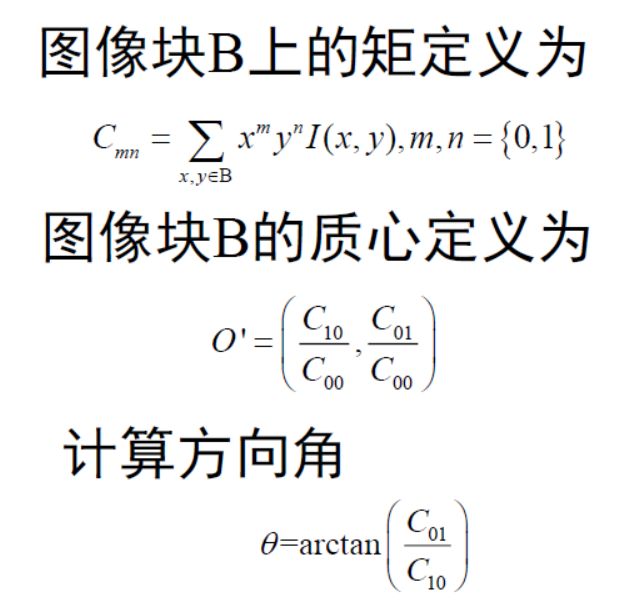
Oriented FAST(ORB)
- 为了获取尺度不变性
构建图像金字塔,在金字塔每一层上上检测关键点。 - 获取旋转不变性
通过灰度质心法(Intensity Centroid)确定图像主方向
特征描述子(Feature Descriptor)
基于直方图的描述子
基于不变性的描述子
二进制描述子
- 每个特征点独特的身份认证
- 同一空间点在不同视角的特征点具有高度相似的描述子
- 不同特征点的描述子差异性尽量大
- 通常描述子是一个具有固定长度的向量(可以理解为一个特征)
特征支持区域:
以特征点为中心取一块区域,有圆形或者矩形,称之为特征支持区域
主方向:进行旋转并重新插值
特征尺度:影响支持区域的大小

基于直方图的描述子
用于微小运动的描述子
以特征点为中心的矩形区域内所有
像素的灰度值作为描述子,拉成一个向量,计算向量间距离
适用于微小变化的图像
对图像存在明显的旋转、尺度、光照和透视变换时不稳定
SIFT描述子--旋转主方向
根据主方向对支持区域进行旋转,并通过双线性插值重构
减去均值再除以方差
图像归一化处理,去除光照变化

过程:
1.统计局部梯度信息
将区域划分成4 4的block
每个 block 内统计梯度方向 的直方图 (高斯加权梯度 作为系数 )
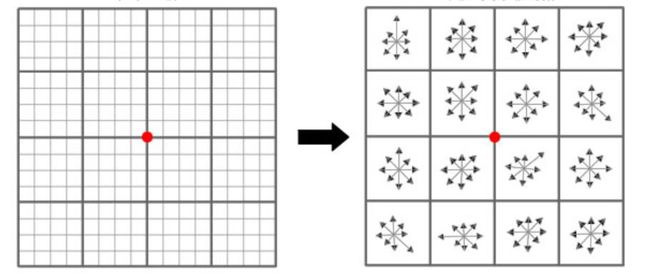
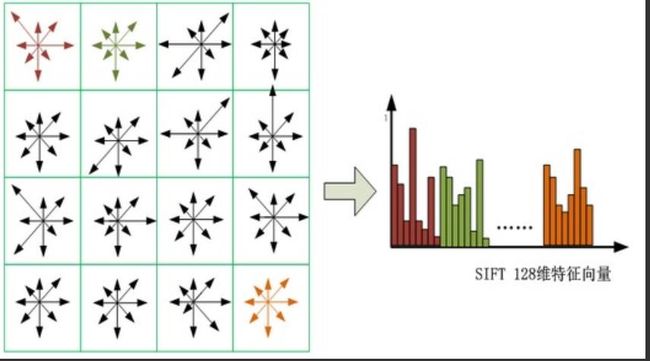
每个block,统计8个方向的直方图,将16个block拉成一列,那就是168 = 128
SIFT描述子——生成描述子
SIFT描述子——归一化处理
- 门限处理—直方图每个方向的梯度幅值不超过0.2
- 描述子长度归一化
归一化处理提升了特征点光度变化的不变性
SIFT描述子变种:PCA-SIFT/SURF
二进制描述子
描述子形式:
描述向量由N个0或者1组成
N= 128,256,512
生成速度快,匹配效率高,不具有旋转不变性
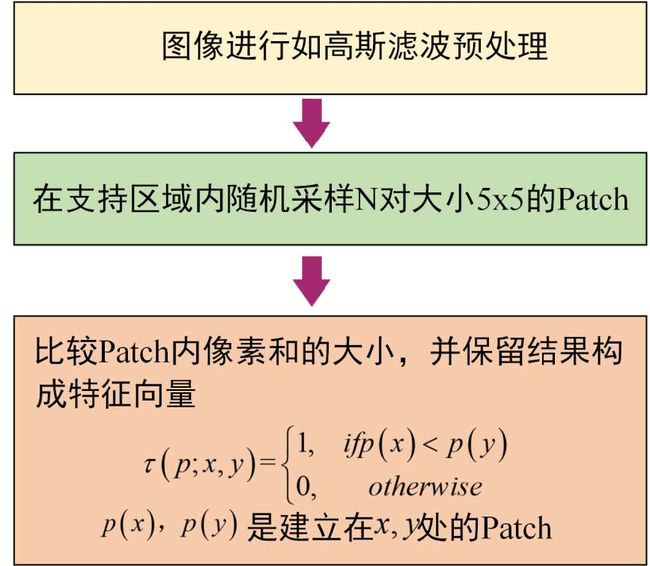
为了使其具有旋转不变性
N对采样点
根据特征点的主方向计算旋转
在新的采样点上进行BRIEF描述子生成

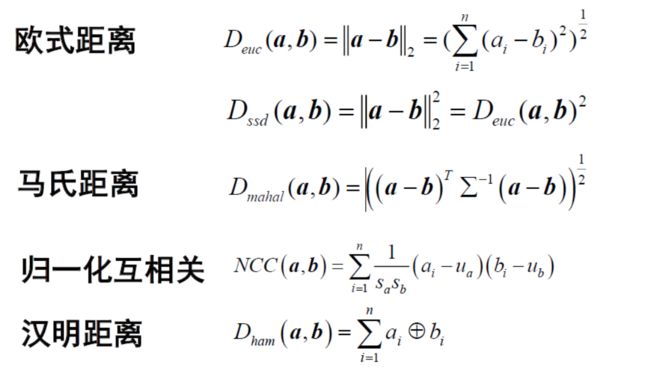
特征匹配
- 距离度量
- 匹配策略
- 高效匹配
- 特征匹配验证
问题描述:
计算两幅图中特征描述子的匹配关系
距离度量
匹配策略
最近邻搜索
最近邻距离比(lowe-ratio)
最近邻距离和次近邻距离比小于一定值

高效匹配
快速最近邻搜索
哈希表
多维Kd-tree
特征匹配
BFM(Bruce Force Mather)匹配ORB的结果

错误的匹配可以通过估计相机模型方式去除
估计 Homography Homography 矩阵之前最好的 50 对匹配对