机器人编程趣味实践13-数据保存和播放(bag)
命令交互工具基本介绍完成,这些调试过程都可以记录下来,用作后续分析。
目标
记录发布在某个主题上的数据,以便可以随时回放和查看。
基础概念
ros2 bag 是一个命令行工具,用于记录系统中发布的主题数据。 它累积传递给任意数量主题的数据并将其保存在数据库中。 然后,可以重放数据以重现测试和实验的结果。 录制主题也是分享工作并允许其他人重新创建它的好方法。
预备功能包
- ros-foxy-rosbag2
- ros-foxy-rosbag2-bag-v2-plugins
- ros-foxy-rosbag2-compression
- ros-foxy-rosbag2-converter-default-plugins
- ros-foxy-rosbag2-cpp
- ros-foxy-rosbag2-storage
- ros-foxy-rosbag2-storage-default-plugin
- ros-foxy-rosbag2-test-common
- ros-foxy-rosbag2-tests
- ros-foxy-rosbag2-transport
- ros-foxy-ros2bag
安装命令:
- sudo apt install ros-foxy-ros2bag ros-foxy-rosbag2-converter-default-plugins ros-foxy-rosbag2-storage-default-plugins
功能包:
- ros2bag
- turtlesim
- source
实践
1 启动节点
将在turtlesim系统中记录键盘输入以供稍后保存和重播,因此首先启动/turtlesim和/teleop_turtle节点。
打开一个新终端并运行:
- ros2 run turtlesim turtlesim_node
打开另一个终端并运行:
- ros2 run turtlesim turtle_teleop_key
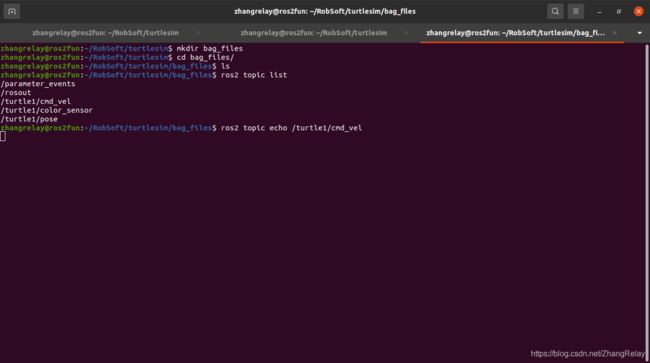
创建一个新目录来存储保存的文件,这也是一种很好的做法:
- mkdir bag_files
- cd bag_files

如果不创建文件夹,就保存在当前路径下。
2 选择主题
ros2 bag 只能记录发布主题的数据。 要查看系统主题列表,请打开一个新终端并运行以下命令:
- ros2 topic list
显示如下:
/parameter_events
/rosout
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
在主题教程中,了解到 /turtle_teleop 节点在 /turtle1/cmd_vel 主题上发布命令以使机器人在turtlesim 中移动。
要查看 /turtle1/cmd_vel 正在发布的数据,请运行以下命令:
- ros2 topic echo /turtle1/cmd_vel
一开始什么都不会显示,因为teleop 没有发布任何数据。 返回运行 Teleop 的终端并选择它以使其处于活动状态。 使用箭头键移动机器人,将看到正在运行 ros2 topic echo 的终端上发布数据。
使用键盘遥控后:

3 保存
要记录发布到主题的数据,请使用以下命令语法:
- ros2 bag record
在选择的主题上运行此命令之前,打开一个新终端并进入之前创建的 bag_files 目录,因为 rosbag 文件将保存在运行它的目录中。
运行命令:
- ros2 bag record /turtle1/cmd_vel
将在终端中看到以下消息(日期和时间会有所不同):
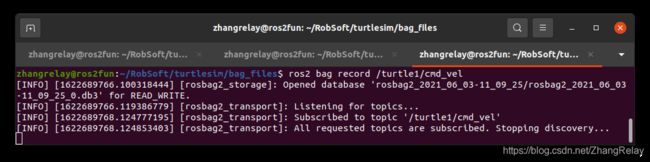
现在 ros2 bag 正在记录 /turtle1/cmd_vel 主题上发布的数据。 返回到teleop 终端并再次移动机器人。 如何移动无关紧要,但请尝试制作可识别的模式,以便稍后重播数据时查看。

按 Ctrl+C 停止录制。
数据将累积在一个名称为 rosbag2_year_month_day-hour_minute_second 模式的包文件中。
记录多组数据主题
还可以记录多个主题,以及更改 ros2 bag 保存到指定名称的文件夹。
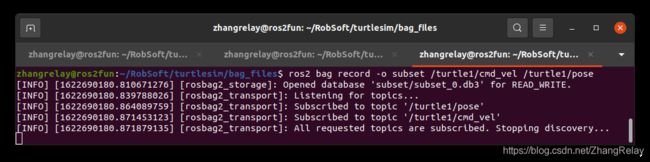
运行以下命令:
- ros2 bag record -o subset /turtle1/cmd_vel /turtle1/pose
-o 选项允许包文件选择唯一的名称。 以下字符串(在本例中为子集)是文件名。
要一次记录多个主题,只需列出每个主题,并用空格分隔。
将看到以下消息,确认正在录制这两个主题。
完成后,可以移动机器人并按 Ctrl+C。
可以在命令中添加另一个选项 -a,它记录系统上的所有主题。
4 包信息
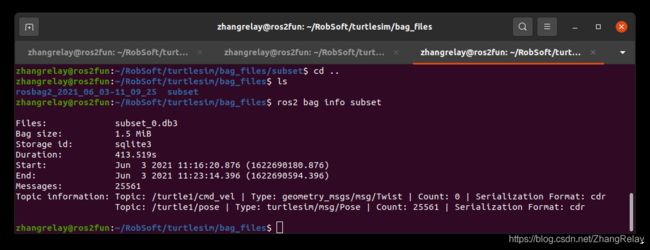
可以通过运行以下命令查看有关录音的详细信息:
- ros2 bag info
在子集包文件上运行此命令将返回有关该文件的信息列表:
- ros2 bag info subset
要查看单个消息,必须打开数据库(在本例中为 sqlite3)来查看它,这超出了 ROS 2 的范围。
5 包播放
在重放包文件之前,在运行teleop 的终端中输入Ctrl+C。 然后确保turtlesim窗口可见,以便可以看到正在运行的包文件。
输入命令:
- ros2 bag play rosbag2_2021_06_03-11_09_25
终端将返回消息:

机器人将遵循之前录制时输入的相同路径(尽管不是 100% 准确;turtlesim 对系统时序的微小变化很敏感)。

如果使用subset
因为文件记录了 /turtle1/pose 主题,所以只要运行着turtlesim,ros2 bag play命令就不会退出,即使没有移动。
这是因为只要 /turtlesim 节点处于活动状态,它就会定期发布关于 /turtle1/pose 主题的数据。 可能已经注意到,在上面的 ros2 bag info 示例结果中,/turtle1/cmd_vel 主题的 Count 信息仅为 0; 这就是我们在录音时按下箭头键的次数。
注意 /turtle1/pose 的 Count 值超过 20000; 在录制时,有关该主题的数据发布了 25561 次。
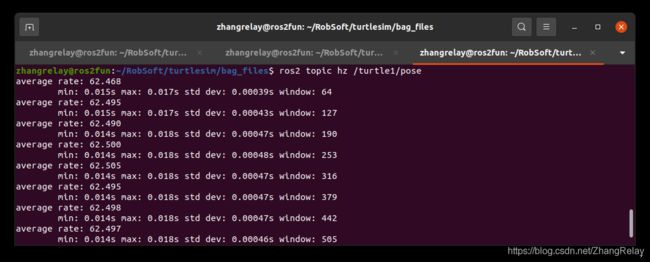
要了解发布位置数据的频率,可以运行以下命令:
- ros2 topic hz /turtle1/pose
总结
可以使用 ros2 bag 命令记录在 ROS 2 系统中传递的主题数据。 无论是与他人分享工作还是回顾自己的实验,它都是一个很好的工具。
已完成“初学者:CLI 工具”教程!
下面教程会通过三维环境机器人再巩固一下这些CLI工具,然后进行更深入的学习。