论文笔记:一种适用于NILM的暂态事件检测算法
目录
1. 前言
2. 双边CUSUM算法原理
3. 引入滑动窗
4. 算法参数
5. 算法流程
6. Next Action
1. 前言
本文是对以下论文的阅读笔记,附有一定的解读和思考。
牛卢璐,贾宏杰:一种适用于非侵入式负荷监测的暂态事件检测算法, 电力系统自动化2011
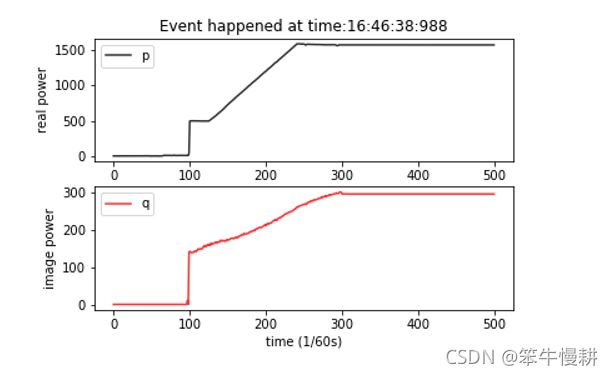
负荷投切等过程中产生的暂态特征相比用电设备的稳态特征,能为负荷辨识提供更多的有用信息,因此利用负荷暂态特征来辨识负荷及其运行状态是NILM 发展的一个主流方向. 基于暂态特征进行负荷辨识,准确掌握电气设备的投切时刻是其关键,为此,该论文提出了一种有效的暂态事件检测算法———基于滑动窗的双边累积和(cumulative sum,CUSUM)暂态事件自动检测算法,它能根据相关信号(如电压、电流、有功、无功等)准确检测到电气设备投切等引起的系统暂态过程,具有算法简单、抗干扰能力强的特点。
2. 双边CUSUM算法原理
考察随机时间序列:
![]()
![]()
其中,Ak和Bk为数学期望为0的随机变量。D为变点(发生变化的时刻)前后的均值变化量。![]() 为发生变化的时刻,
为发生变化的时刻,![]() 表示指示函数(Indicator function)。
表示指示函数(Indicator function)。
该论文考虑基于非参数化的双边CUSUM 变点检测算法确定负荷的投切时刻。其算法原理如下。
定义:

假设稳态时的采样序列均值为μ0,本算法的要点如下:
1)当序列处于稳态时,CUSUM 统计量![]() 和
和![]() 是一个在0附近随机波动的变量,即以0为均值的随机变量(注意,疑原文此处有误。由以上递推关系式可知,
是一个在0附近随机波动的变量,即以0为均值的随机变量(注意,疑原文此处有误。由以上递推关系式可知,![]() 和
和![]() 不会小于0)。
不会小于0)。
2)若序列发生突变,出现正向偏移,偏移后的序列均值上升为μ1>μ0+β,那么,这个向上的、正的偏移就会不断累积到统计量![]() 中,
中,![]() 不断增大;反之,如果序列发生负向偏移,偏移后的序列均值下降为μ1<μ0-β,那么向下的、负的偏移就会不断累积到统计量
不断增大;反之,如果序列发生负向偏移,偏移后的序列均值下降为μ1<μ0-β,那么向下的、负的偏移就会不断累积到统计量![]() 中,
中,![]() 不断增大。
不断增大。
3)当![]() >0,但尚未达到阈值h时,令检测延迟时间
>0,但尚未达到阈值h时,令检测延迟时间![]() =
=![]() +1,否则令
+1,否则令![]() =0。当
=0。当![]() >h 时,一个均值增加的暂态事件被检测出来,采样序列突变的发生时刻τ可以倒推估计为
>h 时,一个均值增加的暂态事件被检测出来,采样序列突变的发生时刻τ可以倒推估计为![]() 。类似地,当
。类似地,当![]() >0,但尚未达到阈值h 时,令检测延迟时间
>0,但尚未达到阈值h 时,令检测延迟时间![]() ,否则令
,否则令![]() 。当
。当![]() >h 时,一个均值减少的暂态事件被检测出来,采样序列突变的发生时刻τ可以倒推估计为
>h 时,一个均值减少的暂态事件被检测出来,采样序列突变的发生时刻τ可以倒推估计为![]() 。
。
3. 引入滑动窗
上述双边CUSUM 算法的优点是算法简单、易于实现,但该算法的应用前提是已知采样序列均值 。对于负荷不断变化的实际电力系统,均值也是不断变化的,为此论文通过引入滑动窗口来对CUSUM 算法进行改进。基本思想:
。对于负荷不断变化的实际电力系统,均值也是不断变化的,为此论文通过引入滑动窗口来对CUSUM 算法进行改进。基本思想:
- 每次针对一个时间窗口内的时间序列进行变点检测,该时间窗口又分为前后两个子窗口:WM(window for mean)用于评估均值,WD(window for detection)用于检测变化。
- 检测完一个窗口后,移动到下一个窗口进行相同的检测。前后两个窗口有一定的overlap。这里分两种情况:
- 如果前一个窗口没有检测到变化事件,则后一个窗口的起始点位置按如下所述方式计算
- 如果前一个窗口检测到变化事件,则后一个窗口从检测到的事件时刻开始
为了防止检测过程中某些暂态事件被漏检,当前WM 窗口的末端与“上一WD窗口减去检测延迟d后”对齐(注意,原文的示意图[如下]并没有正确地表现出这种情况)。这是因为,当暂态事件发生在WD检测窗口的尾部时, ![]() 和
和![]() 可能没有足够的时间上升到阈值h,此时平均值窗口WM 的末端被特意调整放置在暂态事件可能的发生时刻之前,这样可以在新的窗口进一步验证是否真正有暂态事件发生,从而降低了漏检的可能性。
可能没有足够的时间上升到阈值h,此时平均值窗口WM 的末端被特意调整放置在暂态事件可能的发生时刻之前,这样可以在新的窗口进一步验证是否真正有暂态事件发生,从而降低了漏检的可能性。
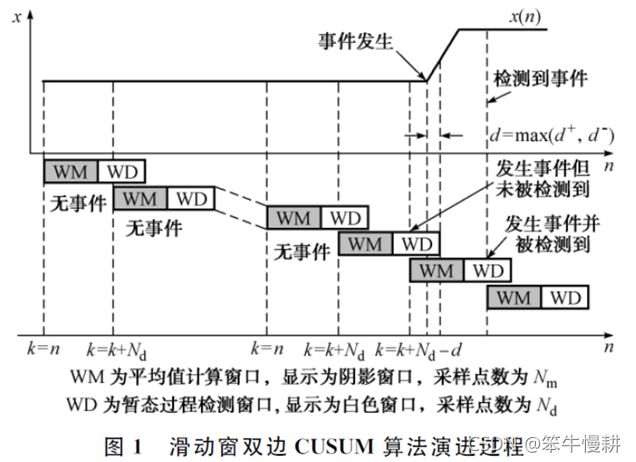
注意,上图的横轴上的关于k的变化与对应的WM和WD的文字说明似乎并不相符。
4. 算法参数
以上算法中有两个参数:h和 。这两个参数的实际的物理含义是什么呢?
。这两个参数的实际的物理含义是什么呢?
h是判决门限,当变化累计量g+或g-超过该门限时即判定为检测到事件发生。与测量噪声的方差有关,即期望模型所能检测到的(当前值相对于均值的)最小变化量。只有大于的变化才会导致g+或g-增长,小于\beta的变化会导致g+或g-变小(此处有疑问,感觉是不是可以改进?)。
考虑一个阶跃性跳变,并考虑期望模型能够检测出的最小阶跃性跳变为![]() ,以及最大允许检测延迟(采样点数)
,以及最大允许检测延迟(采样点数)![]() 。参考下图的阴影区域,当信号量阶跃性跳变到
。参考下图的阴影区域,当信号量阶跃性跳变到![]() 时,每个时刻被计入累计量的有效变化为
时,每个时刻被计入累计量的有效变化为![]() ,要在
,要在![]() 个样点内满足判决条件的话,就要求h和必须满足以下条件:
个样点内满足判决条件的话,就要求h和必须满足以下条件:
![]()

以上考虑的是阶跃性跳变的理想情况,但是实际电力系统中,负荷功率消耗的有功功率一般是缓慢上升而不是阶跃变化的。上述阴影部分并不是一个矩形,此外噪声水平等因素也比较难确定,特引入系数![]() 和
和![]() 来修正阴影部分面积,式(4)可以进一步改写为:
来修正阴影部分面积,式(4)可以进一步改写为:
![]()
5. 算法流程
基于以上讨论,可以得到算法流程如下图所示:

根据对Δmin和Nmax以及抗干扰能力的要求,可以对h等参数进行初始化,然后根据不断读入的数据块来判断系统是否发生了扰动。其中,数据块的采样点数为N,WM 和WD窗口中采样点数分别为Nm和Nd,算法检测到暂态事件的时刻为kevent,暂态事件发生的起始时刻的估计值为kstart。Nm的大小表示平均值计算窗口样本个数的多少,它的取值要能尽量代表正常状态下的特征。Nd表示检测窗口样本个数的多少,Nd值不能太大,否则会由于检测窗口过长而引入较长的检测延迟。
6. Next Action
如上所述,论文中的描述、配图和算法流程图都存在一些疑点,需要进一步确认。
当“爬坡”事件较长时,以上算法似乎(需要实际仿真验证)会导致多次重复触发检测到事件的响应,如何正确识别出它们实际上是属于同一个事件呢?
进一步,“爬坡”的起点和终点其实都应该被正确地识别为变化事件。但是对于某些实际应用来说,可能需要把整个“爬坡”过程当作一个完整的事件来看待(如下图所示),换句话说,如何识别出一个变化事件的起点和终点呢?