ROS下创建发布者发布所需话题过程
在ROS下创建一个发布者实时发布所需话题,本人现在需要写一个实时发布目标点的发布者,现记录一下从零开始实现的过程:
我的环境:Ubuntu 16.04、ROS kinetic;
目录
- 1. 创建工作空间
- 2. 创建功能包
- 3. 编写发布者文件
-
- 3.1 准备工作:
- 3.2 编写发布者文件
- 3.3 修改CmakeLists.txt文件
- 3.4 编译
- 3.5 运行可执行文件并查看发布的话题
1. 创建工作空间
打开一个终端:
mkdir -p ~/target_ws/src //其中target_ws为我新建的工作空间名
cd ~/target_ws/src
catkin_init_workspace //初始化工作空间
cd ~/target_ws
catkin_make //编译,编译完成后,会发现catkin_ws中多了两个文件 build 和 devel
echo "source ~/target_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
2. 创建功能包
cd ~/catkin_ws/src/
catkin_create_pkg target_pub std_msgs roscpp rospy //target_pub为功能包的名称
cd ~/target_ws
catkin_make //编译功能包
显示以下信息表明创建成功。
此时打开target_ws下的src文件夹,发现里面多了target_pub文件夹,这就是我们刚建的功能包。

里面包括include、src、CmakeList.txt、package.xml等文件,如下:

3. 编写发布者文件
3.1 准备工作:
想要创建发布者发布消息,首先你要明确你想要发布什么类型的消息。对于我来说,我知道我要发布一个 /move_base_simple/goal的话题,于是我去查看这个话题的发布的消息类型:
指令如下:
rostopic info /move_base_simple/goal
结果如下:
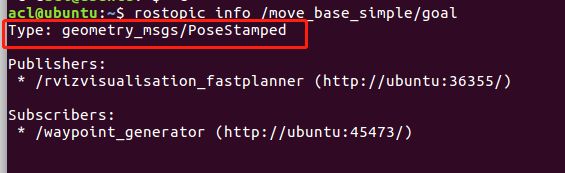
所以我要发布的消息的消息类型是 geometry_msgs/PoseStamped,于是下一步需要确定此消息类型具体包含的消息格式:
指令如下:
rosmsg show geometry_msgs/PoseStamped
结果如下:
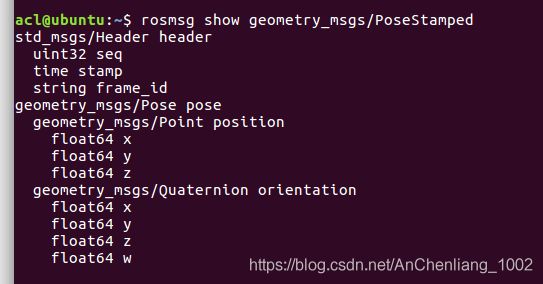
好,现在我们知道了需要发布的消息类型以及消息包含的消息格式,就可以去编写发布者了。
3.2 编写发布者文件
打开target_ws/src/target_pub/src文件夹,在里面新建文件talker.cpp文件,在里面添加代码如下:
/**
* 该例程将发布/move_base_simple/goal话题,消息类型geometry_msgs/PoseStamped
*/
#include 代码对应的注释我已经写在了程序中。
3.3 修改CmakeLists.txt文件
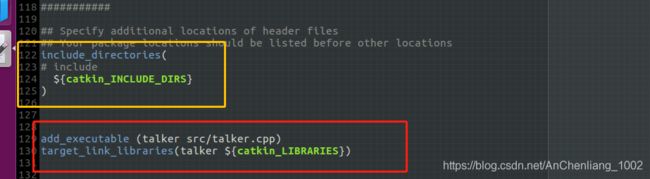
打开CmakeList.txt文件(路径为:/home/acl/target_ws/src/target_pub,其中acl为我Ubuntu的用户名),在里面添加以下代码:
add_executable (talker src/talker.cpp)
target_link_libraries(talker ${
catkin_LIBRARIES})
注意:红框为所需添加的代码,其必须要放在黄框中代码的后面。
3.4 编译
打开一个终端,
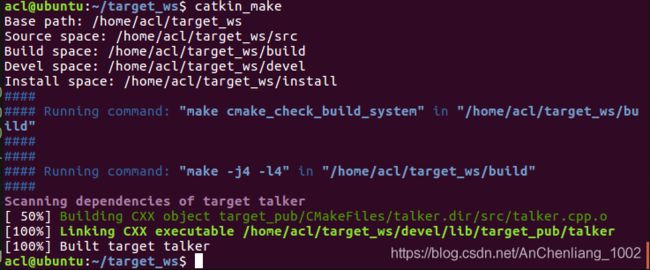
cd ~/target_ws
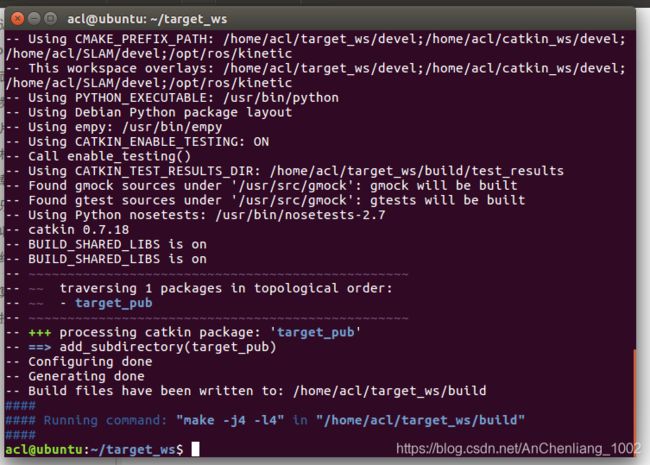
catkin_make
出现以下内容则表明编译成功。
此时,打开lib文件夹(路径为/home/acl/target_ws/devel/lib,acl为我的Ubuntu用户名),发现里面多了target_pub文件夹,即为生成的目标文件夹,里面存放着刚刚编译生成的可执行文件。如图: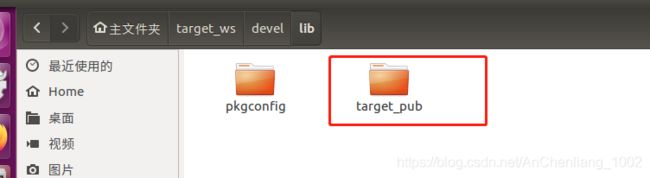
3.5 运行可执行文件并查看发布的话题
为验证发布的话题是否发布成功,我们运行可执行文件:
打开一个终端:
cd target_ws
source devel/setup.bash
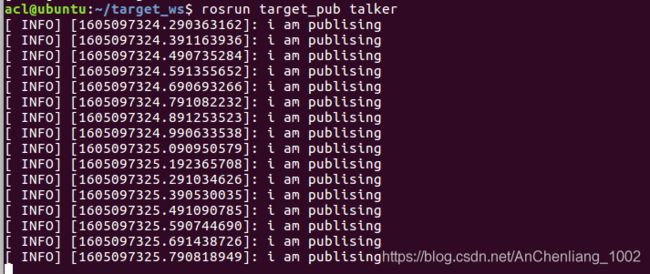
rosrun target_pub talker
出现以下结果则表明话题发布成功。
我们来具体查看一下发布话题的数据:
重新打开一个终端:
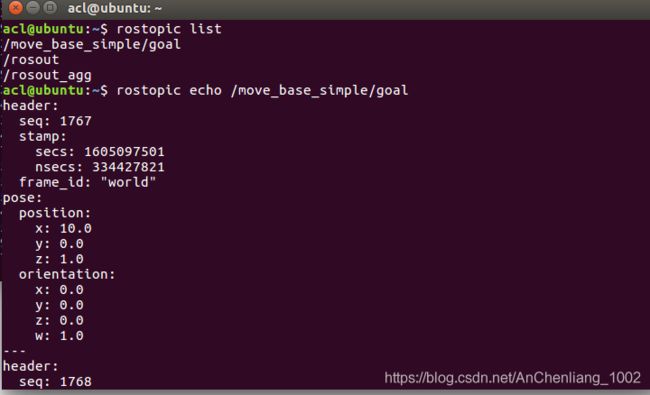
rostopic list

红框里的话题即是我们刚刚创建发布者发布的话题。查看一下话题的内容:
rostopic echo /move_base_simple/goal
发布的内容如下图所示,确实是我们发布的消息内容,至此已经成功发布所需的话题消息。