智能车浅谈——电机控制篇
文章目录
- 前言
- 运动控制系统
-
- 被控对象
- 执行机构
- 控制器
- 反馈环节
-
- M法测速:
- T法测速
- 小结
- 直流调速系统
-
- 桥式可逆PWM变换器
-
- (1)正向运行
- (2)反向运行
- 总结
前言
之前借用自动控制原理对智能车的方向控制做了一个简单的分析,今天继续分析智能车的电机控制,本文以电力拖动自动控制系统——运动控制系统(第五版)作为参考。
运动控制系统
运动控制系统是通过控制电机电压、电流、频率等输入量,来满足工作机械的转矩、速度、位移等机械量,使各种工作机械按照人们期望的要求运行,以满足生产及应用的需要。
运动控制系统由电机、功率变换装置、控制器及相应的传感器构成,其框图及涉及学科领域如下图
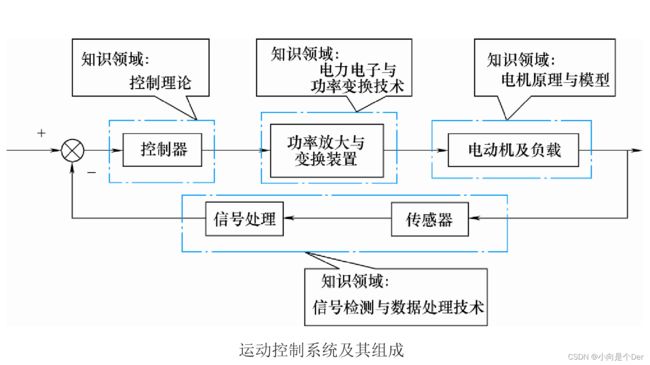
对照运动控制系统的结构框图,可以推断出智能车中的运动控制系统如下:

被控对象
电机是门深奥的学问号称自动化专业的天书之最(笔者当初被电机学折磨的有阴影,故有关电机不做分析)。(此处所提到的电动机都是车模上指定的普通直流电机,不包括十七届中的无刷电机)智能车中的电机都是用于调速系统的拖动电机,而舵机则是用于伺服系统的伺服电动机的一种。
执行机构
功率放大与变换装置在智能车系统之中指的是电机驱动,能够根据主控输出的信号,动态的调节被控对象(直流电机)的驱动电压达到控制车身速度的作用。
控制器
智能车运动控制的控制器一般采用数字PI控制(关于PI控制器后面会出一篇PID的文章描述)由单片机的算法产生这里借用龙邱科技的 代码片。
// An highlighted block
typedef struct
{
float kp; //P
float ki; //I
float kd; //D
float imax; //积分限幅
float out_p; //KP输出
float out_i; //KI输出
float out_d; //KD输出
float out; //pid输出
float integrator; //< 积分值
float last_error; //< 上次误差
float last_derivative;//< 上次误差与上上次误差之差
unsigned long last_t; //< 上次时间
}pid_param_t;
pid_param_t Speed_PID;
Speed_PID.kp = 130;
Speed_PID.ki = 2.5;
Speed_PID.kd = 0.25;
/*************************************************************************
* 函数名称:void Motor_Control(void)
* 功能说明:电机控制
* 参数说明:
* 函数返回:
* 修改时间:
* 备 注:这类设计PID运算的函数一定要放在定时器中断内保持控制周期稳定
*************************************************************************/
void Motor_Control(void)
{
MotorDuty1 = (int)PidIncCtrl(&Speed_PID, Target_Speed - ECPULSE1);
if(MotorDuty1 > 8000)MotorDuty1 = 8000;else if(MotorDuty1 < -8000)MotorDuty1 = -8000;
if(Speed_PID.out > 8000)Speed_PID.out = 8000;else if(Speed_PID.out < -8000)Speed_PID.out = -8000;
Motor1Ctrl(MotorDuty1);
// 电机闭环控制
}
/*************************************************************************
* 函数名称:float constrain_float(float amt, float low, float high)
* 功能说明:pid增量式控制器输出
* 参数说明:
* @param pid pid参数
* @param error pid输入误差
* 函数返回:PID输出结果 注意输出结果已经包涵了上次结果
* 修改时间:2020年4月1日
* 备 注:
*************************************************************************/
float PidIncCtrl(pid_param_t * pid, float error)
{
pid->out_p = pid->kp * (error - pid->last_error);
pid->out_i = pid->ki * error;
pid->out_d = pid->kd * ((error - pid->last_error) - pid->last_derivative);
pid->last_derivative = error - pid->last_error;
pid->last_error = error;
pid->out += pid->out_p + pid->out_i + pid->out_d;
return pid->out;
}
反馈环节
此处的反馈环节是使用的增量式旋转编码器作为传感器(常见旋转编码器分为绝对式和增量式感兴趣的小伙伴自己去了解吧);T法、M法作为信号处理的方式(数字测速方法有三种:T法、M法、M/T法;还有分辨率和测速误差率这一类的知识感兴趣的同学自己去找书研究研究)关于编码器,已经在硬件篇做过分析,不理解的可以去我第一篇博文查看,这里主要分析下M法测速和T法测速,电机每转一圈编码器(智能车中的电机圈和编码器圈数不是1:1,需要根据齿数比换算)共产生Z个脉冲,编码器输出脉冲的频率f1 = M1 / Tc。
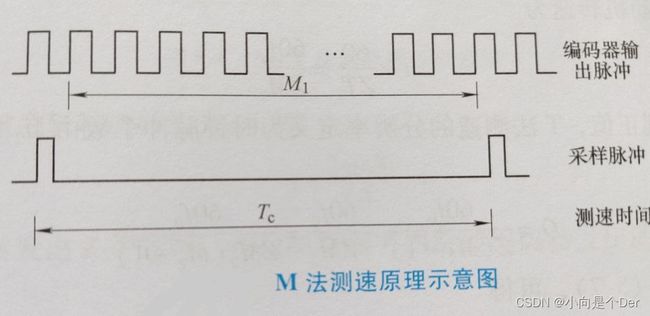
M法测速:
M法测速:在一定的时间Tc内测取旋转编码器输出的脉冲个数M1,用以计算这段时间内的转速,称为M法测速。
由系统的定时器按照采样周期的时间定时一段时间,这里我们假设为Tc=1s,利用单片机的计数器捕获编码器在此段时间内产生的上升沿或者下降沿个数M1这里假设为1024,设电机旋转一圈,编码器产生512个脉冲,则此时转速为:
n = M1 / Z*Tc = 1024 / 512×1 单位:r/s
n1 = 2 r/s
M法总结:定时一段时间Tc,记录下此段时间内产生的脉冲数M1,再用电机运动一圈的脉冲数Z联立可以得到n=M1 / Z*Tc。
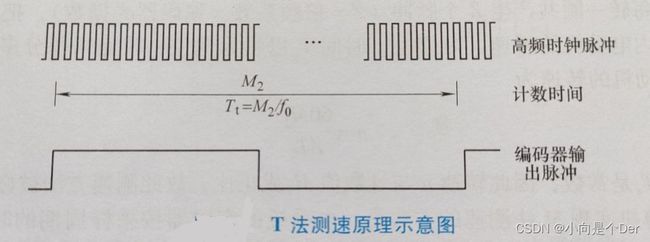
T法测速
T法测速是测出旋转编码器两个输出脉冲之间的间隔时间来计算转速,也被称为周期法测速。
T法测速其实就是采集编码器两个相邻上升沿或者下降沿所用时间
Tt=M2 / f0 ;
M2可以理解成在编码器第一个上升沿开始计数到第二个上升沿到来时停止计数的时钟周期个数;
f0可以理解为单片机的时钟脉冲频率;
此处为方便理解,假设1s时间单片机时钟可以产生65536个时钟脉冲,而编码器此时两个上升沿之间的时钟脉冲个数为M2=65个,则此时编码器一个脉冲的时间
Tt = 65/(65536/1)=0.001s
则此时的转速满足:n = f0 / Z*M2
所以:n2 = 65536 / 512 * 65 = 1.97 r/s
小结
T法M法计算的都是转速,如果想要得到实际速度还需要知道车轮旋转一周小车的前进距离。但是对于智能车而言,实际速度的参考价值和单位时间内的脉冲数的参考价值一样,都能反映出车身速度,这两者之间也仅仅相差一个机械结构决定的比例,所以怕麻烦的同学可以直接选取脉冲数作为速度量进行控制。数字测速方式还有一种M/T法测速,它可以很好地弥补T法和M发的缺点,无论在高速或者低速都具有较好的分辨率和检测精度,感兴趣的同学自行了解,笔者在此不再介绍。
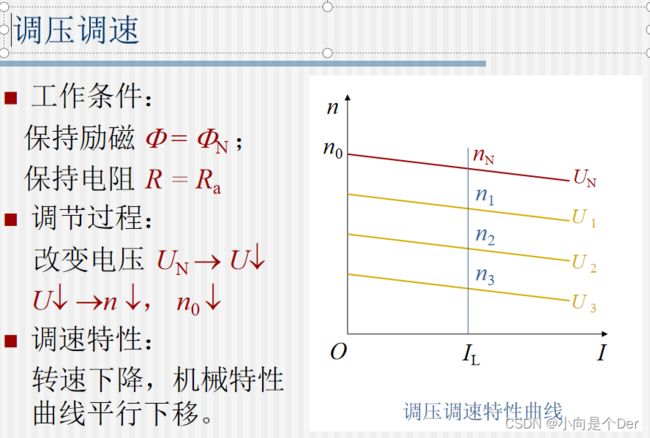
直流调速系统
直流电动机的稳态转速方程可以表示为:
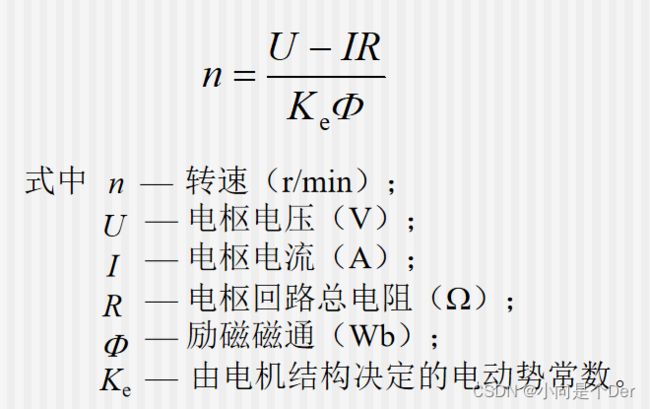
根据上式,从数学的角度可以得知,直流电机有三种调节转速的方法:
(1)调节电枢供电电压 U。
(2)减弱励磁磁通 φ。
(3)改变电枢回路电阻 R。
由于智能车比赛中的电机已经指定了,那么方法2,3显然不可取,剩下的就是方法1了,所以智能车的速度控制都是采取的变压调速。
桥式可逆PWM变换器
这个直流调速系统知识点很多,因为智能车中几乎都是运用的PWM加全桥,因此此处仅解析桥式可逆PWM变换器。
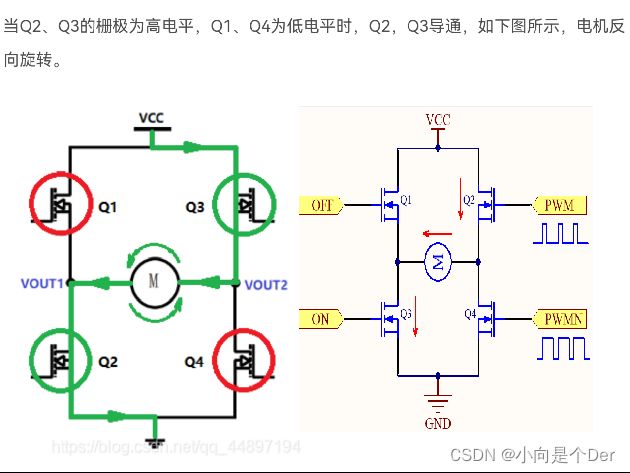
可逆PWM变换器主电路有多种形式,最常用的是桥式(亦称H形)电路如下图所示:
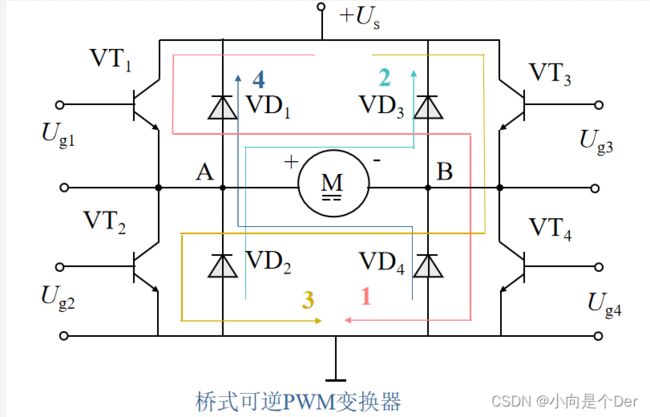
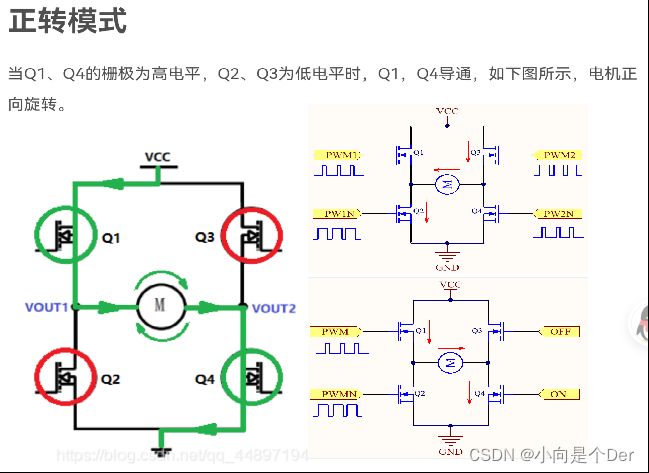
电动机M两端电压的极性随开关器件栅极驱动电压极性的变化而改变,其控制方式有双极式、单极式、受限单极式等多种,这里分析双极式控制的可逆PWM变换器,需要注意的是智能车中多使用的是单极性控制,大致过程与双极性相似。
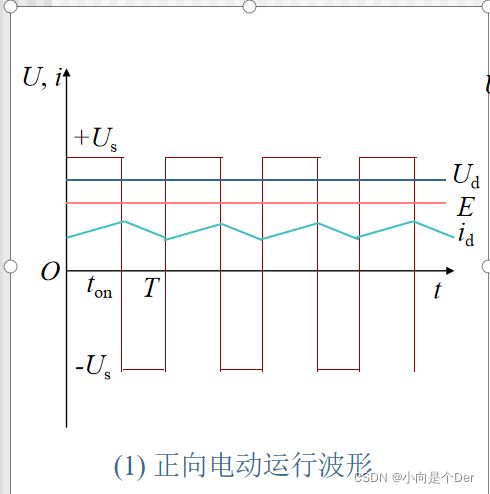
(1)正向运行
第1阶段,在 0 ≤ t ≤ ton 期间, Ug1 、 Ug4为正, VT1 、 VT4导通, Ug2 、 Ug3为负,VT2 、 VT3截止,电流 id 沿回路1流通,电动机M两端电压UAB = +Us ;
第2阶段,在ton ≤ t ≤ T期间, Ug1 、 Ug4为负, VT1 、 VT4截止, VD2 、 VD3续流, 并钳位使VT2 、 VT3保持截止,电流 id 沿回路2流通,电动机M两端电压UAB = –Us ;
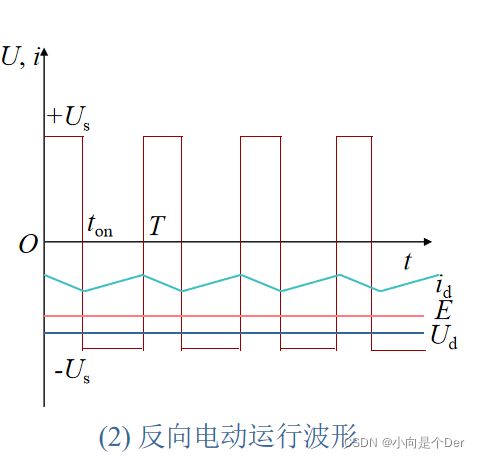
(2)反向运行
第1阶段,在 0 ≤ t ≤ ton 期间, Ug2 、 Ug3为负,VT2 、 VT3截止, VD1 、 VD4 续流,并钳位使 VT1 、 VT4截止,电流 –id 沿回路4流通,电动机M两端电压UAB = +Us ;
第2阶段,在ton ≤ t ≤ T 期间, Ug2 、 Ug3 为正, VT2 、 VT3导通, Ug1 、 Ug4为负,使VT1 、 VT4保持截止,电流 – id 沿回路3流通,电动机M两端电压UAB = – Us ;
整个电机控制的流程图如下所示:
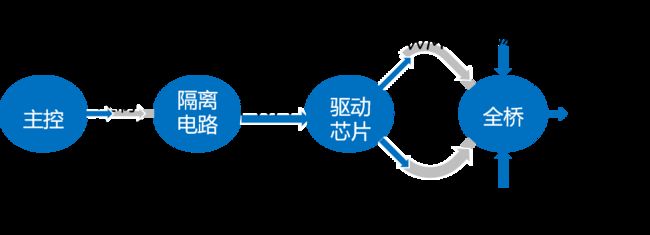
此处与硬件篇的电机驱动联系,可以按照硬件篇的去参考大佬们的有关博文。
总结
智能车的电机控制介绍就到这里,由于运动控制这门课知识太多,无法全面展示给大家,笔者也是就这自己的所学所悟写了这篇文章,仅供参考。做这个系列的初心是希望大家对一辆智能车所覆盖的学科领域有所了解,诚然,现在市面上有很多很多的现成方案,上手难度相对降低了,但是大家面对现成的方案,不是应该先去深挖一下方案的原理和理论吗?智能车不是调参比赛也不是拼模块大赛,希望大家好好利用参赛的时间,去把自己的理论知识与实际结合,笔者认为比赛的真实目的也是为了大家更好的掌握理论知识而不是一味地追求名次。
行文至此,略有所感,予以记之,望诸君共勉。