经典目标检测算法:RCNN、Fast RCNN、 Faster RCNN 基本思想和网络结构介绍
目录
-
- 一、目标检测的基本介绍
-
- 1.1 什么是目标检测?
- 1.2 目标检测算法的分类
- 二、RCNN
-
- 2.1 RCNN简介
- 2.2 RCNN算法流程
- 2.3 RCNN流程图
- 2.4 RCNN框架
- 2.5 RCNN的缺点
- 三、Fast RCNN
-
- 3.1 Fast RCNN简介
- 3.2 Fast RCNN算法流程
- 3.3 Fast RCNN流程图
-
- 3.3.1 总体流程
- 3.3.2 softmax 分类器
- 3.3.3 边界框回归器(bbox regressor )
- 3.3 Fast RCNN 中 loss 的计算
- 3.4 Fast RCNN框架
- 3.5 Fast RCNN的缺点
- 四、Faster RCNN
-
- 4.1 Faster RCNN简介
- 4.2 Faster RCNN算法流程
- 4.2 RPN网络
-
- 4.2.1 RPN网络结构
- 4.2.2 anchor的定义
- 4.2.3 RPN生成proposal的过程
- 4.3 Faster RCNN框架
- 五、三者的比较:RCNN、Fast RCNN、 Faster RCN
- 六、参考资料
一、目标检测的基本介绍
1.1 什么是目标检测?
所谓目标检测就是在一张图像中找到我们关注的目标,并确定它的类别和位置,这是计算机视觉领域最核心的问题之一。由于各类目标不同的外观,颜色,大小以及在成像时光照,遮挡等具有挑战性的问题,目标检测一直处于不断的优化和研究中。
1.2 目标检测算法的分类
传统的目标检测算法有:SIFT(尺度不变特征变换)、HOG(方向梯度直方图)、DPM(一种基于组件的图像检测算法)等。
基于深度学习的目标检测算法可以分为两类:二阶算法(Two Stage)和一阶算法(One Stage)。
- 二阶算法:先生成区域候选框,再通过卷积神经网络进行分类和回归修正。常见算法有 RCNN、SPPNet、Fast RCNN,Faster RCNN 和 RFCN 等。二阶算法检测结果更精确。
- 一阶算法:不生成候选框,直接在网络中提取特征来预测物体的分类和位置。常见算法有 SSD、YOLO系列 和 RetinaNet 等。一阶算法检测速度与更快。
二、RCNN
2.1 RCNN简介
RCNN(Region with CNN feature)算法出现于2014年,是将深度学习应用到目标检测领域的开山之作,凭借卷积神经网络出色的特征提取能力,大幅度提升了目标检测的效果。
RCNN在PASCAL VOC2012数据集上将检测率从35.1%提升至53.7%,使得CNN在目标检测领域成为常态,也使得大家开始探索CNN在其他计算机视觉领域的巨大潜力。
论文:《 Rich feature hierarchies for accurate object detection and semantic segmentation 》
作者:Ross Girshick
源码(作者提供):https://github.com/rbgirshick/rcnn
2.2 RCNN算法流程
RCNN继承了传统目标检测的思想,将目标检测当做分类问题进行处理,先提取一系列目标的候选区域,然后对候选区域进行类。
其具体算法流程包含以下4步:
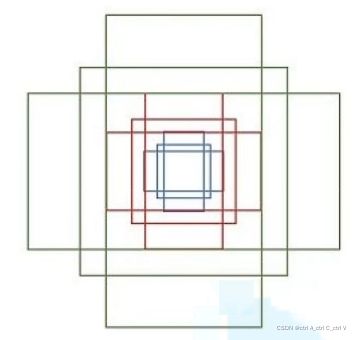
(1)生成候选区域:
采用一定区域候选算法(如 Selective Search)将图像分割成小区域,然后合并包含同一物体可能性高的区域作为候选区域输出,这里也需要采用一些合并策略。不同候选区域会有重合部分,如下图所示(黑色框是候选区域):
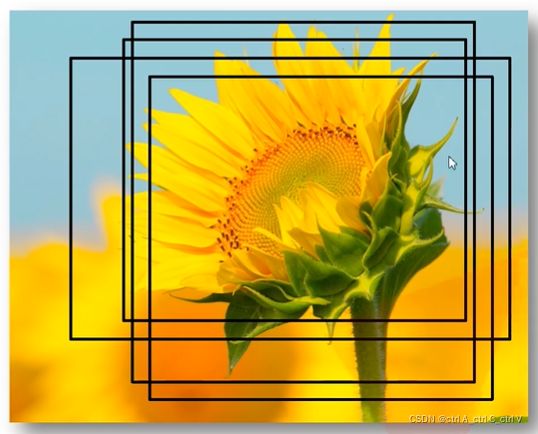
要生成1000-2000个候选区域(以2000个为例),之后将每个区域进行归一化,即缩放到固定的大小(227*227).
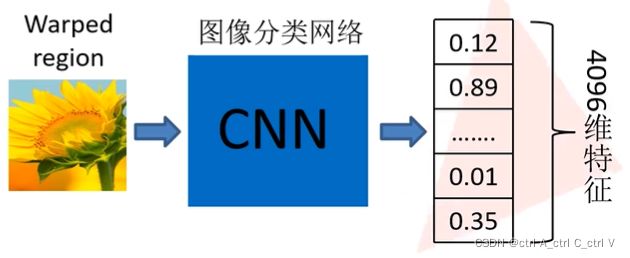
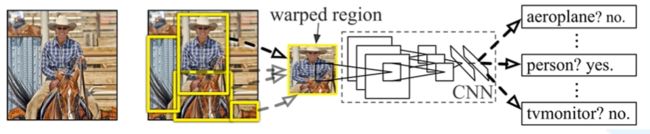
(2)对每个候选区域用CNN进行特征提取:
这里要事先选择一个预训练神经网络(如AlexNet、VGG),并重新训练全连接层,即 fintune 技术的应用。
将候选区域输入训练好的AlexNet CNN网络,得到固定维度的特征输出(4096维),得到2000×4096的特征矩阵。
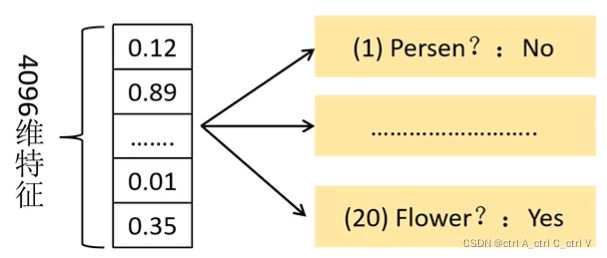
(3)用每一类的SVM分类器对CNN的输出特征进行分类:
此处以PASCAL VOC数据集为例,该数据集中有20个类别,因此设置20个SVM分类器。
将2000×4096的特征与20个SVM组成的权值矩阵4096×20相乘,获得2000×20维矩阵,表示2000个候选区域分别属于20个分类的概率,因此矩阵的每一行之和为1。
分别对上述2000×20维矩阵中每一列(即每一类)进行非极大值抑制剔除重叠建议框,得到该列即该类中概率最大的一些候选框。
非极大值抑制剔除重叠建议框的具体实现方法是:
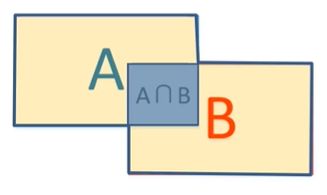
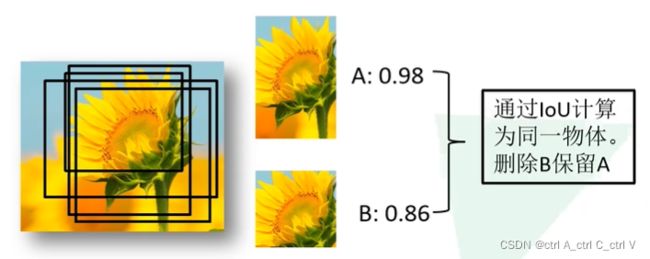
第一步:定义 IoU 指数(Intersection over Union),即 (A∩B) / (AUB) ,即AB的重合区域面积与AB总面积的比。直观上来讲 IoU 就是表示AB重合的比率, IoU越大说明AB的重合部分占比越大,即A和B越相似。
第二步:找到每一类中2000个候选区域中概率最高的区域,计算其他区域与该区域的IoU值,删除所有IoU值大于阈值的候选区域。这样可以只保留少数重合率较低的候选区域,去掉重复区域。
比如下面的例子,A是向日葵类对应的所有候选框中概率最大的区域,B是另一个区域,计算AB的IoU,其结果大于阈值,那么就认为AB属于同一类(即都是向日葵),所以应该保留A,删除B,这就是非极大值抑制。
(4)使用回归器精修候选区域的位置:
通过 Selective Search算法得到的候选区域位置不一定准确,因此用20个回归器对上述20个类别中剩余的建议框进行回归操作,最终得到每个类别的修正后的目标区域。具体实现如下:
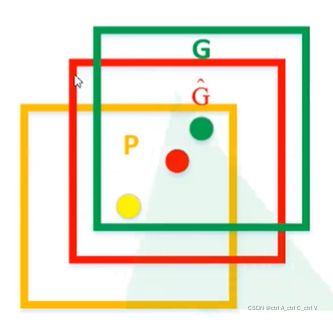
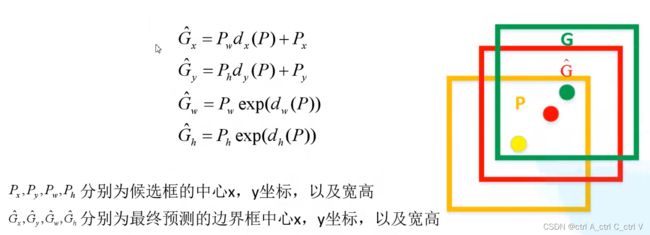
如图,黄色框表示候选区域 Region Proposal,绿色窗口表示实际区域Ground Truth(人工标注的),红色窗口表示 Region Proposal 进行回归后的预测区域,可以用最小二乘法解决线性回归问题。
通过回归器可以得到候选区域的四个参数,分别为:候选区域的x和y的偏移量,高度和宽度的缩放因子。可以通过这四个参数对候选区域的位置进行精修调整,就得到了红色的预测区域。
2.3 RCNN流程图
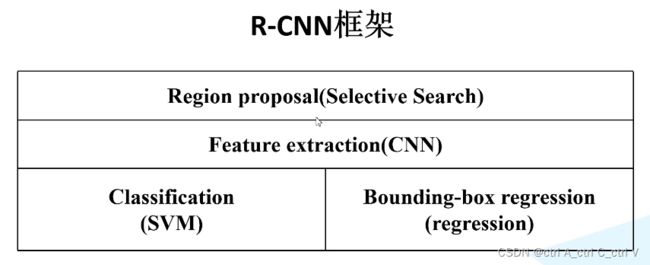
2.4 RCNN框架
RCNN由四个部分组成:SS算法、CNN、SVM、bbox regression。
2.5 RCNN的缺点
(1)训练和测试速度慢,需要多步训练,非常繁琐。
(2)由于涉及分类中的全连接网络,因此输入CNN的候选区域尺寸是固定的,造成了精度的降低。
(3)候选区域需要提前提取并保存,占用的空间很大。对于非常深的网络,如VGG16,从VOCO7训练集上的5000张图片上提取的特征需要数百GB的存储空间,这个问题是致命的。
RCNN 成为了当时目标检测领域的SOAT算法,尽管现在已经不怎么用了,但其思想仍然值得我们借鉴和学习。
三、Fast RCNN
3.1 Fast RCNN简介
在RCNN之后,SPPNet解决了重复卷积计算和固定输出尺寸两个问题,SPPNet的主要贡献是在整张图像上计算全局特征图,然后对于特定的建议候选框,只需要在全局特征图上取出对应坐标的特征图就可以了。但SPPNe仍然存在一些弊端,如仍然需要将特征保存在磁盘中,速度还是很慢。
Fast RCNN算法是2015年Ross Girshick(还是这位大佬)提出的,在RCNN和SPPNet的基础上进行了改进。根据名字就知道,Fast RCNN更快更强。其训练步骤实现了端到端,基于CGG16网络,其训练速度比RCNN快了9倍,测试速度快了213倍,在PASCAL VOC2012数据集达到了68.4%的准确率。
论文:《Fast R-CNN》
源码(作者提供):https://github.com/rbgirshick/fast-rcnn
3.2 Fast RCNN算法流程
(1)一张图像生成1K~2K个候选区域(使用Selective Search算法,简称SS算法),我们将某个候选区域称为ROI区域。
(2)将图像输入网络得到相应的特征图,将SS算法生成的候选框投影到特征图上获得相应的特征矩阵。
R-CNN vs Fast-RCNN:
R-CNN依次将2000个候选框区域输入卷积神经网络得到特征,存在大量冗余,提取时间很长。
Fast-RCNN将整张图像送入网络,一次性计算整张图像特征,这样就可以根据特征图的坐标获得想要的候选区域的特征图,不需要重复计算。
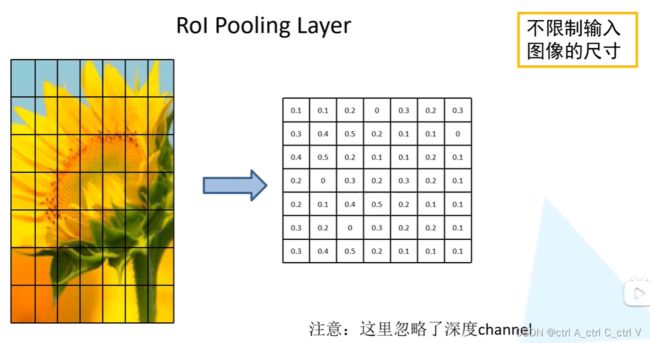
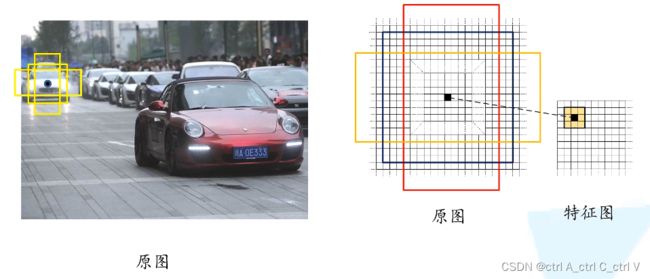
(3)将每个特征矩阵通过 ROI pooling 层缩放到7x7大小的特征图。
前面讲到RCNN需要将候选区域归一化到固定大小(227227),而Fast RCNN并不需要这样的操作,Fast RCNN通过pooling层将每个候选区域的特征图都变为77,如下图所示:
(4)将特征图展平(reshape)为向量,通过一系列全连接层和 softmax得到预测结果。
3.3 Fast RCNN流程图
3.3.1 总体流程
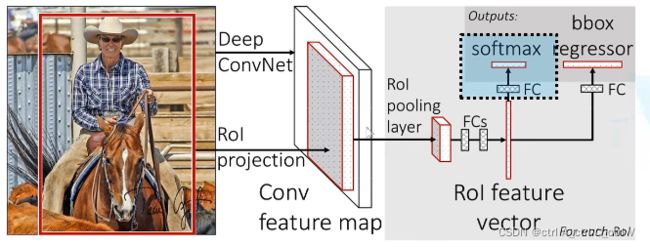
如图,将一张图像输入到 Deep ConvNet 中得到图像的特征图,根据ROI区域与整体图像的坐标映射关系 (RoI Projection)进行特征映射(Conv feature map),能够得到每一个候选区域(ROI区域)的特征矩阵。
将每一个特征矩阵通过RoI pooling layer,池化到固定尺寸(7*7),然后展平为向量(vector)。再经过两个全连接层(fully connected layers,FC),得到ROI特征向量(ROI feature vector)。
之后 ROI feature vector 并联两个FC,其中一个用于目标概率预测(softmax),另一个用于边界框参数的回归(bbox regressor,bbox 表示 bounding box)。
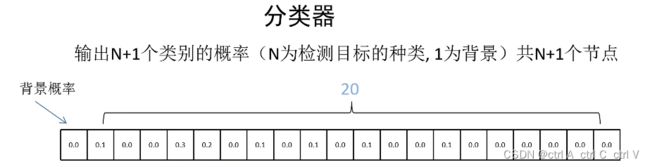
3.3.2 softmax 分类器
softmax 分类器输出N+1个类别的概率,如下图所示。PASCAL VOC2012数据集中有20个分类,因此会输出21个类别的概率,其中第一个为背景概率,其余20个为每个分类的概率。所以softmax的FC中有N+1个节点。
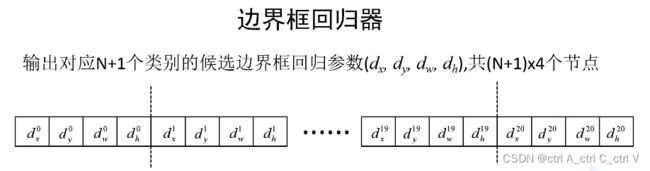
3.3.3 边界框回归器(bbox regressor )
一幅图片中会画出N+1个分类的候选框,每个候选框都有x、y、w、d四个参数,所以 bbox regressor 的FC中有 4(N+1) 个节点。
边界框参数回归的计算方法:
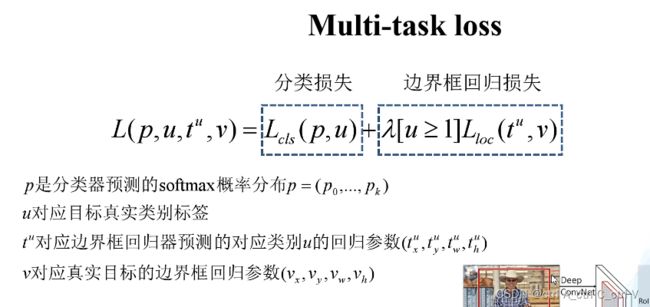
3.3 Fast RCNN 中 loss 的计算
因为在Fast RCNN 中需要预测N+1个类别的概率以及边界框的回归参数,所以定义了两个损失函数:分类损失和边界框回归损失。
3.4 Fast RCNN框架
首先回顾一下RCNN的框架:

RCNN由四部分组成,因此需要多步训练,非常繁琐。
Fast RCNN将CNN特征提取,SVM边界框分类,bbox regression边界框回归三部分结合到了一起,都融合到同一个CNN中。那么Fast RCNN就只有两部分了:先通过SS算法获取候选框,再通过CNN完成特征提取、分类和边界框回归。
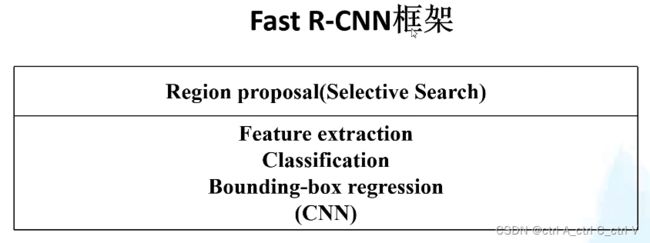
那么自然而然的,在接下来的 Faster RCNN 算法中,就要考虑如何将 Region proposal 也融入到CNN中,将整个算法合并为一个网络,这样就可以实现端到端的目标检测。
3.5 Fast RCNN的缺点
1、尽管用到了GPU,但Region proposal还是在CPU上实现的。在CPU中,用SS算法提取一张图片的候选框区域大约需要2s,而完成整个CNN则只需要0.32s,因此Fast RCNN 计算速度的瓶颈是Region proposal。
2、无法满足实时应用,没有真正实现端到端训练测试;
四、Faster RCNN
4.1 Faster RCNN简介
Faster RCNN 是作者 Ross Girshick 继 RCNN 和 Fast RCNN后的又一力作。同样使用 VGG16作为网络的backbone,推理速度在GPU上达到5fps(包括候选区域的生成),准确率也有进一步的提升。在2015年的ILSVRC以及cOco竞赛中获得多个项目的第一名。
4.2 Faster RCNN算法流程
Faster RCNN = RPN + Fast RCNN
RPN 是指 Region Proposal Network,建议区域生成网络。 Faster RCNN 中用 RPN 来代替了 Fast RCNN 中的SS算法。
算法流程:
(1)将图像输入网络得到相应的特征图。
(2)使用RPN网络生成候选框,将RPN生成的候选框投影到特征图上获得ROI区域的特征矩阵。
(3)将每个ROI区域的特征矩阵通过 ROI pooling 层缩放到7x7大小的特征图,接着将特征图展平为vector,之后通过一系列全连接层得到预测结果。
Faster RCNN 网络的基本结构如下:

4.2 RPN网络
4.2.1 RPN网络结构

图中的 conv feature map 是图像输入网络得到相应的特征图,通过sliding window处理之后产生一个256d的一维向量。该向量通过两个全连接层,分别输出分类概率scores和边界框回归参数coordinates,其中k是指 k个 anchor boxes,2k个scores是每个 anchor box 分别为前景和背景的概率(注意这里只区分前景和背景,所有的类别都归为前景),4k个coordinates是因为每个anchor box 有四个参数。
4.2.2 anchor的定义
那么什么是 anchor呢?
首先要明确,anchor不是候选框(Proposal),后面会提到二者的区别。
我们在特征图中找一个点,就可以在原图中找到对应的一个像素点,以该像素点为中心,画出9个不同大小和长宽比的框,称为anchor 。如下图所示,这些anchor里面可能包含目标,也可能没有目标。因为我们在一张图中想找的的目标的大小和长宽比并不是固定的,所以这里用9个不同大小和长宽比的anchor来进行预测。
那么为什么是9个anchor呢?
论文中给出了每个anchor的面积和长宽比:

所以特征图中的每个位置在原图中都会生成 33=9 个anchor,如下图所示,蓝色的三个anchor是面积为128128的,红色是面积为256256的,绿色是512512的。
4.2.3 RPN生成proposal的过程
对于一张 1000x600x3 的图像(三通道),用3x3的卷积核进行特征提取得到60x40的特征图,则共有 60x40x9 (约2w个)个anchor。忽略超过图片边界的 anchor 后,剩下约 6000 个anchor。
对于这6000 个 anchor,通过RPN生成的边界框回归参数将每个 anchor 调整为proposal(前面提到了每个anchor经过RPN都输出2个概率和4个边界框回归参数),这里就能看到anchor和proposal的区别。这个过程就是 RPN 生成候选框的过程。
RPN 生成的候选框之间存在大量重叠,基于候选框的cls得分,采用非极大值抑制,IoU设为0.7,这样每张图片只剩下 2000 个候选框。
4.3 Faster RCNN框架
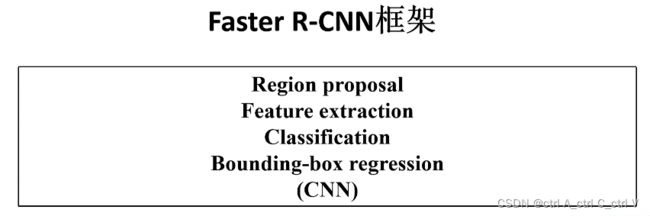
Faster RCNN 在Fast RCNN的基础上更进一步,将候选框生成也融入到CNN网络中,使得 候选框生成、特征提取、候选框分类、候选框边界回归这四大部分都结合在一个CNN网络中,避免了分步训练,实现了真正端到端的目标检测。
五、三者的比较:RCNN、Fast RCNN、 Faster RCN
三者都是二阶算法,网络框架比较:
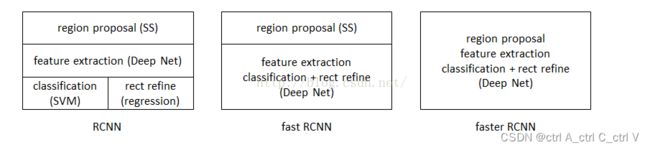
可以看到,从RCNN、Fast RCNN 到 Faster RCNN,网络框架越来越简洁,目标检测效果也越来越好。
三者的优缺点比较:

六、参考资料
视频(B站):Faster RCNN理论合集
博客:Faster R-CNN论文笔记——FR
博客:Faster RCNN 优缺点说明