点云数据生成三维模型_海量点云数据的建筑物三维模型重建

来源:《测绘科学》2019年4期
作者:贾雪,刘超,徐炜,赵兴旺
整理排版:勘测联合网
摘 要:针对传统测量方式在建筑物的保护中,存在工作量大、容易对建筑物造成二次伤害的问题,该文结合现代测量手段与三维激光扫描技术,提出了利用镶嵌法进行建筑物三维模型重建的研究思路。基于点云数据获取、处理与三维建模的理论,以安徽省淮南市安徽理工大学本部“红楼”为例,实现了对“红楼”点云数据的拼接、合并、降噪等处理工作,并结合中海达HD_3LS_SCENE软件与3DMax软件各自的优势进行了“红楼”真三维模型的重建。实验结果表明,该数据的处理方法具有速度快、效率高、精度好等特点。
关键词:点云数据;三维激光扫描;镶嵌法;三维建模
0 引言
中国古建筑因其独特的风格和丰富的历史内涵闻名于世界,是我国文化传承的无声载体,间接反映出了当时人们的生活方式、生活习惯以及科学技术的发展水平,具有重要的历史价值、艺术价值和科学研究价值。三维激光扫描技术具有无接触性、精确性和高效性等特点,因而在古建筑的保护、修缮、三维建模中可发挥着巨大优势。国内外学者对三维激光扫描技术在古建筑中的应用进行了大量的研究,文献[6]以福建省上杭县古田会议会址为例,将三维扫描的建模方式与传统几何造型的建模方式相结合,提出基于激光扫描的三维几何造型建模方案;文献[7]以西北民族大学蝴蝶厅异地重建项目为例,提出了一种结合三维激光扫描技术和现代测量技术以及本体思维进行室内外一体化三维建模的研究思路;文献[8]以三维激光扫描获取的大雁塔海量点云数据为例,探讨三维激光扫描数据的获取流程、数据处理方法,研究了古建筑三维重建中点云数据获取与处理的详细过程;文献[9]以河南大学大礼堂为例,对点云数据进行处理,在虚拟现实软件中构建出精确的虚拟大礼堂。
本文以安徽理工大学本部“红楼”为例,使用中海达HS650扫描仪获取了“红楼”的点云数据,利用HD_3LS_SCENE软件实现了对点云数据的拼接、合并、降噪等处理,并基于“镶嵌法”的思想,使用3DMax软件实现了对“红楼”三维模型的重建,对“红楼”的保护与修缮具有一定的参考价值。
1 建筑物三维建模总体方案
利用三维激光扫描仪对建筑物三维建模,整体流程主要包括准备工作、点云数据采集、点云处理和点云建模4个步骤,具体流程如图1所示。
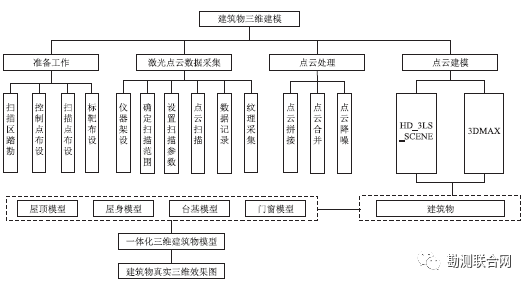
图1 基于激光扫描的建筑物三维建模流程图
1)准备工作。要想获得建筑物完整的表面信息,保证后续建模工作的顺利进行,前期的准备工作必须做充分,扫描区踏勘、控制网布设、扫描点布设、标靶布设、绘制草图等都决定着扫描结构合理性、数据全面性以及质量可靠性等。
2)点云数据采集。数据质量是保证模型是否构建成功的重要一步,根据站点排列的结构特征,设置各站合适的扫描范围,确保全面覆盖的同时,尽量减少过高的重叠度。同时,根据站点与建筑物的距离,设置激光扫描仪合适的射程和频率参数。此外,依据建筑物体的纹理信息与实际要求,进行照片采集和特征点坐标获取,为后续建筑物贴图和质量检核提供保证。
3)数据处理。将前期扫描数据与建模结合起来,数据处理至关重要。未经过处理的点云数据是散乱无序排列的,无法进行建模,只有经过点云拼接、合并、降噪等处理后,才能将数据导入3DMax软件中进行建模。现行的地面三维激光扫描仪一般都具有数据的后处理软件,本文用的是中海达扫描仪数据处理软件HD_3LS_SCENE,将数据导入到HD_3LS_SCENE软件中,进行相应的点云拼接、合并和降噪等处理,得到高质量的点云建模数据。
4)三维建模。将HD_3LS_SCENE软件处理好的建筑物海量点云数据导入3DMax中,由于建筑物的表面不是一个简单的平面,而是由屋顶、屋身、台基以及门窗等复杂图案表面形成的,若直接采用三维模型,不仅增加数据量而且影响建模速度。因此,采用分块建模将比较有效,先将屋顶、屋身、台基和门窗等模型分块构建,再将分块建立的模型进行组装,形成一体化的建筑物三维模型,并将经过裁剪、旋转、调色后的照片进行纹理贴图,构建建筑物真实感的三维模型。
2 基于地面激光雷达的三维模型建模
本文选取位于安徽省淮南市安徽理工大学本部校区3栋“红楼”中的中间主“红楼”为例,使用中海达HS650扫描仪采集“红楼”的点云数据。“红楼”是由苏联专家设计的3栋红砖红瓦建筑群落,开工于1950年,落成于1952年。中间主“红楼”东西长约72.8m,南北宽约21.3m,建筑面积约1 550m2,总体呈“飞机”一般的对称结构,中间“机身”部分为3层结构,左右“机翼”为2层结构,内部主要是木材与砖混结构。
2.1 准备工作及数据采集
准备工作以及数据采集是三维建模的前提,通常占总工作量的20%,数据采集主要包括点云数据采集和纹理数据采集。
1)现场踏勘。根据“红楼”的扫描条件,了解“红楼”的现场条件与所需获取的空间信息。
先将“红楼”四周的障碍物清除(矮小树木,杂草等),减少扫描黑洞,提高扫描质量。同时,合理布置控制网,提前规划好扫描仪的扫描站点和标靶的位置,在保证设站覆盖整个扫描区域的同时,防止扫描站点过多,增加扫描时间,降低扫描效率。
2)控制网与扫描站点的布设方案。根据建模与精度的要求,以“红楼”周围已知控制点J01、J02作为已知边,在“红楼”周边增加5个导线加密点(A1~A5),形成闭合网,导线全长相对闭合差为1/12 912,控制网布设图如图2所示。根据距离划分,“红楼”周围共布设扫描站点17个,其中9站远距离扫描,距“红楼”约50m,主要获取“红楼”的整体及顶部点云数据;8站近距离扫描,距“红楼”约20m,主要获取“红楼”中下部点云数据,外部控制点位分布如图2所示。
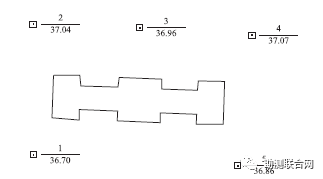
图2 外部控制点位分布
3)标靶粘贴。多站点云数据的精确配准需要依靠标靶来实现,标靶布设应均匀分布,避免摆放在一条直线上,并保证每站至少有4个同时可见为原则。为了提高拼接精度,采用平面标靶和球型标靶结合使用,高处主要采用平面标靶,而接近地面的部分则采用球形标靶,并将球型标靶高低错落摆开。利用免棱镜全站仪获取特征点坐标时应将平面标靶的坐标也同时测出来,以方便后期拼接精度检核。
4)纹理数据采集。纹理数据采集应遵循纹理特征均一、曝光适宜、拍摄角度适宜、无光斑、无遮挡,纹理间亮度一致的原则,以获取代表性目标纹理数据。纹理数据采集时,要尽量使用高像素相机,并保证照片为正射影像,相邻照片间要至少20%的重叠部分,对于颜色差别较大的部分(例如墙体、屋顶、踢脚板等),要单独采集纹理信息,以免产生较大的影像反差。同时,还要注意光线问题,选择合适的采集时间,保证采集的纹理清晰、颜色饱满。
5)数据采集记录。由于激光扫描工作时,采集的大量数据是以文件夹的形式保存,不能即时进行处理、检核,为了方便后期数据检核和数据信息管理,有必要进行数据的采集记录。尤其是在对建筑物进行扫描,获取点云的阶段,需要对各个测站点的位置、扫描站数、扫描方案做详细的记录。必要时,绘制草图说明,并记录扫描参数、仪器状态、扫描环境等,并详细备注扫描过程中出现的特殊情况。
2.2 点云数据的拼接、合并与降噪
点云数据处理主要包括点云拼接、点云合并和点云降噪等。处理过程中,首先对各站点云进行拼接,站点间的拼接精度要达到0.05m。其次是点云合并,相邻两站间有10%以上的重叠区,点云合并可以保证结构不变的情况下,有效地减少数据量。最后进行点云降噪,将与对象无关的点云进行删减剔除,提高点云质量。
点云拼接,三维激光扫描仪采用分站式的作业方式,获得的每一站数据都有自己独立的坐标系统,要想获得全方位的点云数据,就必须将他们配准到一个统一坐标系下。外业扫描得到的点云数据在导入软件后,首先要进行数据拼接,即把多站扫描的点云数据转化到同一坐标系中,采用公共重叠区域的点云拼接,形成一个整体。常用的拼接方法有:标靶拼接、同名点拼接、视图拼接、标靶与同名点的混合拼接和已知控制点的拼接。本文采用标靶和同名点的混合拼接,为了提高同名点的准确性,在“红楼”的高处粘贴平面标靶代替同名点,然后在HD_3LS_SCENE软件中进行拼接。拼接时采用先两两测站进行拼接,然后再把拼接好的结果与另外两站的拼接结果进行拼接,以其中的一次拼接为例,拼接精度为1~2cm,拼接部分点位误差如表1所示。
表1 部分点云拼接精度

由表1可以看出,3个控制点的拼接精度均小于2cm,符合仪器5cm拼接误差要求,且总体拼接误差只有0.5mm,点云拼接效果较优。
点云合并,由于分站式扫描,产生了一定的重叠区域;扫描仪与建筑物的距离也会影响扫描的数据量,一般距离越近,点云密度越大,距离越远,点云密度越小;数据拼接过程中未减少数据量,也会造成数据冗余。而获取的点云数据量过大,对硬件设施要求较高,需要高配置的计算机才能运行和浏览,降低了数据处理效率。因此,有必要在不影响数据精度的情况下,对点云数据进行精简,即对重叠区域合并。在HD _3LS_SCENE软件中,执行合并命令,系统将自动生成简化后的“红楼”点云数据,原始点云数据的HLS文件大小为18.6GB,合并后的点云数据的文件大小分为878MB。经点云合并操作后,既不影响原有建筑物原有的纹理结构,又减少了数据存储空间,提高了数据处理效率。
点云降噪,三维激光扫描仪所得到的原始点云数据,是一个分布散乱的空间数据集合。在扫描中,所得点云数据会受到周围环境诸多因素的影响,如:移动的车辆、行人、树木的遮挡、建筑物本身的反射特性不均匀、扫描仪的扫描方向与建筑物反射面夹角超限等。虽然经过点云合并处理后,点云数据得到了大量删减,但合并未改变原有数据的纹理结构,原有的噪声点仍然存在。噪声点不仅会占用存储空间,增加计算机的处理时间,还会对点云的分割、识别和建模等产生影响,应对其剔除。在HD_3LS_SCENE软件中,先人为删除大范围噪声点云,再通过软件自动识别噪声点的方法删除零散的噪声点,通过人工和计算机软件的交互操作,切换不同视角,剔除所有的噪声点,噪声剔除前后对比情况如图3所示。
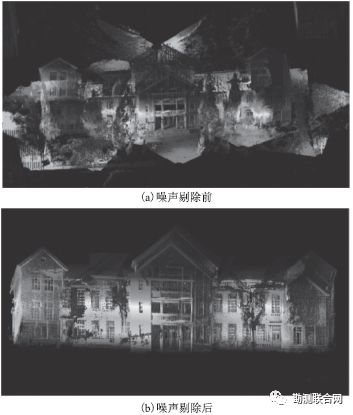
图3 点云数据降噪
由图3可以看出,降噪处理减少了多余障碍物,提高了数据的清晰度。同时,通过降噪减少了数据的冗余,降噪前数据为878MB,降噪后数据量为297MB,有效提高了数据质量。
2.3 三维建模重建
三维建模主要包括三维几何建模和纹理贴图两个部分,三维几何建模构造出“红楼”的整体构造,形成结构完整的“红楼”白膜,纹理贴图可以构造出真实感的三维模型。
镶嵌建模,与传统的量取尺寸建模不同,在3DMax 2015及以上的高版本中,可以将拼接好的点云数据导入工作面,再根据拼接好的点云结构特征,设计合理的镶嵌模块,进行分块建模。分块建模可以很好地构造复杂模块的细节,且不破坏整体结构。经镶嵌分块建模后,再将屋顶、屋身、台基和门窗等块状模型进行组合,构造出完整的“红楼”三维立体模型,最后将点云数据隐藏,便可得到清晰的“红楼”白膜。镶嵌建模过程如图4所示,“红楼”的白模图如图5所示。

图4 点云导入3DMax镶嵌建模

图5 “红楼”白膜
纹理贴图,为了使建筑模型更加逼真,需要将原始纹理图片进行处理,再通过3DMax软件贴图到白膜上,构建如照片般的真实感三维模型。然而,由于在获取建筑物的纹理信息时,很难获得图像的正射图,且因为光线、遮挡、亮度等原因会导致纹理信息与建筑物的实际信息出现偏差,不能直接进行纹理贴图,需要用Photoshop软件先对照片进行矫正,转化为正视投影图,并进行裁剪、去杂色、平和色调等处理,使照片能反映建筑物的真实纹理信息。最后在3DMax中进行渲染和贴图,期间若出现贴图扭曲错位现象,应对应添加UVW 贴图坐标,调整纹理坐标与模型坐标,使几何模型与纹理数据匹配,展现真实感的三维模型。“红楼”的三维模型俯视图如图6所示,最终真实感效果图如图7所示。

图6 “红楼”俯视图

图7 “红楼”真实感模型
3 三维模型质量评价
3.1 模型精度评价
模型精度即模型的精细程度,可通过将模型与实际建筑物进行对比,判断其数据是否完整、是否有缺失的部分,是否符合精度要求。具体检核时可通过随机选取模型棱角分明的部位,测量其精确的尺寸,再与模型的尺寸进行对比,观察其偏差是否满足要求,从而对模型进行评价。三维建模后与传统测量获得的部分部件数据对比如表2所示。
表2 部分零部件模型与实物偏差
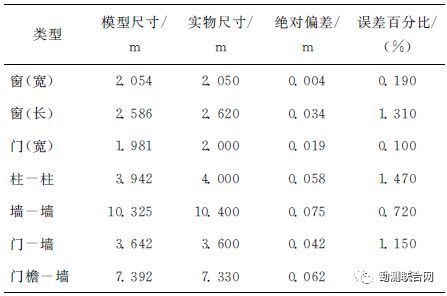
从表2可以看出,模型的整体结构应精确地反映建筑物外轮廓的基本特征,如两面墙之间的差值为0.075m,两根柱子之间的差值为0.058m,门与墙角之间的差值为0.042m,门檐与墙之间的差值为0.062m,满足了模型尺寸与实际物体相差不超过0.1m 的要求。模型局部细节的尺寸应按实际物体的轮廓特征进行三维建模,如窗户宽差值0.004m,窗长误差0.034m,门宽0.019m,满足尺寸误差不超过0.05m要求。由此可见,此次三维建模符合精度要求。
3.2 纹理评估
纹理评估是对贴图效果进行的质量评价,将二维的纹理图像与三维立体模型表面进行匹配,需要对其配准的正确性、清晰度,以及纹理与几何模型对应的情况进行判断,并结合具有场景效果的野外高像素照片进行对照,观察是否真实反映古建筑物现状,同时要考虑其年代特征以及不同的材质情况。“红楼”局部与整体效果对比,分别如图8~图9所示。

图8 “红楼”局部场景效果对比

图9 “红楼”整体效果对比
从图8、图9对比可知,贴图纹理与“红楼”的真实场景纹理基本保持一致,都是红砖红瓦构成,未出现失真现象。纹理拼接过渡部分也较为自然,无纹理接缝不衔接问题、亮度也基本相同。物体的纹理应与真实材质也较为接近,如门窗为木材质,表现为哑光,玻璃具有一定的透明度,踢脚板为真实的混凝土结构。由效果对比图可知,本模型的纹理贴图效果较好。
4 结束语
本文以安徽理工大学本部“红楼”为例,利用HD_3LS_SCENE软件快速地完成扫描数据的拼接、合并、降噪等处理,并利用3D Max软件实现了对“红楼”的三维模型重构。重构后的三维模型精度高、纹理较为真实、模型尺寸精确,可进行任意方向、任意角度的三维剖切,产生不同视角的剖切面图,以贴近真实的状态来观察和体会建筑物的气息。同时,也便于建筑物的电子存档和后期的开发利用,对建筑物的保护与修复具有一定的实用意义。
参考文献:略
声明:勘测联合网转载本文仅限行业学习交流之用,版权、著作权归原载平台及作者所有。
推荐阅读室内激光点云的三维场景快速重建
面向三维城市建模的多点云数据融合方法综述
利用三维点云数据的土方量计算方法
三维激光扫描点云配准算法与精度研究
倾斜摄影三维模型的大场景地形融合研究
倾斜影像的三维模型构建与模型优化
