阿木实验室无人机编队起航
也许是守望于浪漫主义的理想,也许是憧憬于无人机集群技术的未来潜力,阿木实验室的无人机编队技术开始实测啦!


一、编队控制理论
对无人机协同控制的研究一般分为两个方向:编队构型的形成与构型维持。其中编队构型主要是设计编队构型,以符合如燃料最优、时间最短、精确避障、其他任务等目标;而构型维持即在飞行过程保持其设计构型,包括遇到突发状况的快速恢复和构型之间的转换等。在协同控制方面,目前主流研究方法主要有主-从式法、基于行为法、虚拟结构法、一致性方法等。关于各种编队理论的详细分析可以参考阿木实验室的往期文章,下附链接这里就不赘述了。这期我们主要讲讲主-从式方法的实现。
https://mp.weixin.qq.com/s/qL29jHv1V9HCkoHlK8da-Q
二、编队通讯系统
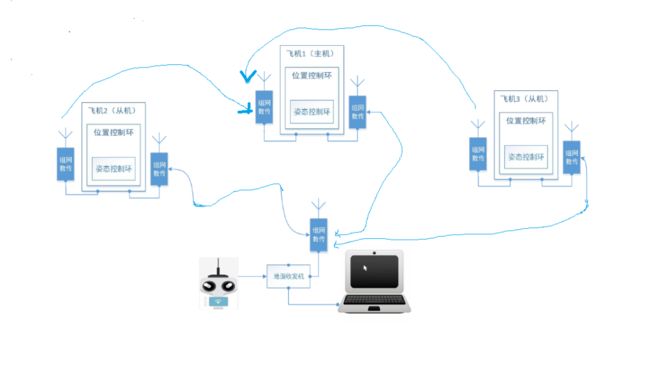
主-从式编队中,主机通常只有一个,沿预定轨迹飞行,跟随者通过通信或感知得到与主机的相对位置并以一定的构型与主机保持距离,速度达到一致,进而稳定飞行。因此在测试飞行时,每架飞机有两个数传,一个数传与地面站保持通信,查看飞行的状态与模式的切换,一个数传用于主机将速度与位置发送给从机。通信链路如下图。
通信链路的是否稳健往往直接影响了测试的效率与结果,相信每一个无人机爱好者说起它都有一把辛酸泪,这里为了减少大家的弯路,推荐一下我们的数传模块:
模块易于使用,共享一个通用的硬件串口,并提供各种不同的协议,使用户可以用最少的开发时间和风险去集成到你的无人机或者设备上面。不需要编程,高增益天线下支持4公里的高带宽数据传输,12MB/S的数据速率,支持多机组网。详情如下:
https://homer-wiki.readthedocs.io/en/latest/
通信链路的是否稳健往往直接影响了测试的效率与结果,相信每一个无人机爱好者说起它都有一把辛酸泪,这里为了减少大家的弯路,推荐一下我们的数传模块:
模块易于使用,共享一个通用的硬件串口,并提供各种不同的协议,使用户可以用最少的开发时间和风险去集成到你的无人机或者设备上面。不需要编程,高增益天线下支持4公里的高带宽数据传输,12MB/S的数据速率,支持多机组网。详情如下:
https://homer-wiki.readthedocs.io/en/latest/

三、编队实测
无人机测试工作不比小车,无人机一个不小心就要炸,编队测试还得去室外,抛开测试人员的抗晒能力,老天爷还要给面子,下雨就得收摊。所以前期的电脑仿真实验和有序的测试工作的展开是提高研发效率的两大关键。
这周实现的是一次基础的编队飞行,采用GPS定位位置信息,下一次计划使用RTK定位。三架多旋翼飞行器横向一字同时起飞后,主机切入任务模式,沿地面站设定的航迹飞行,从机切入编队模式,接收主机发来的位置和速度信息,调整自己的位置与速度,实现构建的队形。
①单机校验
到达飞行场地后,每架飞机磁力计,陀螺仪、加速度计、水平校准(阿木实验室记录,最快2分55秒完成),然后是自稳模式下,前后左右简单飞行测试,常有某个方向有掉高的现象,地面站一顿调参后,确保单机的飞行状态符合测试要求。如果大家在单机校验出现一些很奇怪的问题,比如自旋。在排除完硬件问题的情况下,我们的经验是重刷代码和重新设定参数往往比排查出这个问题更能推进测试速度。
②从机编队测试
在三架飞机的队形的测试之前,先进行的单架从机的编队模式测试,验证单架飞行器的程序有没有bug,是否对应正确的编队位置。飞机切入编队模式就会去找自己的编队位置,如果初试位置与设定位置不同,很有可能出现两机相撞的事故。
③编队切换
三架飞起后,进入设定高度(不同高度可以降低撞机风险),首先切入三角队形。

三角队行飞行一段时间后,切入横向一字队形。
横向一字队形后,短暂切入三角队行,再切入竖向一字队形。
不积跬步,无以至千里;不积小流,无以成江海。无人机集群的路还很漫长,不知你是否愿与阿木实验室为伴,一起加油!
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把无人机行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在无人机行业,就请关注我们的公众号,我们将持续发布无人机行业最有价值的信息和技术。
扫码关注-阿木实验室
官网:https://www.amovlab.com/
