【深度学习原理第6篇】深入解析VGGNet网络+keras实现
目录
-
- 前言
- 一、VGG网络模型结构
- 二、VGG16和VGG19网络结构分析
-
- 2.1 VGG16解析
- 2.2 VGG-19解析
- 代码实现(VGG-16为例)
- 三、VGG相较AlexNet改进详解
-
- 3.1 小卷积核
- 3.2 小池化核
- 3.3 层数更深特征图更宽
- 3.4 全连接转卷积
前言
这是入门必备经典网络学习的第二篇,VGGNet由牛津大学的视觉几何组(Visual Geometry Group)和Google DeepMind公司的研究员共同提出,是以解决ImageNet比赛中的1000类图像分类和定位问题而展开的,该网络斩获2014年分类第二(第一是GoogLeNet),定位任务第一。让我们开始吧!
一、VGG网络模型结构

上图为VGG的网络结构,是作者论文中的实验图,共做了6组实验,对应6个不同的网络模型,分别是A,A-LRN,B,C,D,E。最后两组,也就是最深的两组D,E就是著名的VGG-16和VGG-19,这两组模型在分类和定位任务上的效果最好。我们再看它的网络结构,也是可以分为5个卷积部分+3个全连接,和AlexNet十分相似,很多AlexNet的影子,VGG是在它的基础上改的,可以对比学习。不太记得AlexNet可以回顾下:AlexNet网络详解
二、VGG16和VGG19网络结构分析

2.1 VGG16解析
1、首先输入的图片假设为224×224×3的彩色图片,即输入层图像矩阵大小为(224,224,3)
2、执行第一步(stage1),两个卷积块Conv1_1和Conv1_2,内含64个3×3大小的卷积核,卷积只改变通道数,64个卷积核就将矩阵变成(224,224,64),再经过卷积核大小为2×2,步长也为2的maxpooling,对图像进行最大值池化,如下图,使得图像矩阵的长宽减半,图像变为(112,112,64)
3、执行第二步(stage2),两个卷积块Conv2_1和Conv2_2,内含128个3×3大小的卷积核,卷积后图像就变为(112,112,128),再经过卷积核大小为2×2的maxpooling,图像矩阵长宽减半,变为(56,56,128)
4、执行第三步(stage3),两个卷积块Conv3_1和Conv3_2,内含256个3×3大小的卷积核,卷积后图像就变为(58,58,256),再经过卷积核大小为2×2的maxpooling,图像矩阵长宽减半,变为(28,28,256)
5、执行第四步(stage4),两个卷积块Conv4_1和Conv4_2,内含512个3×3大小的卷积核,卷积后图像就变为(28,28,512),再经过卷积核大小为2×2的maxpooling,图像矩阵长宽减半,变为(14,14,512)
6、执行第五步(stage5),两个卷积块Conv5_1和Conv5_2,内含512个3×3大小的卷积核,卷积后图像就变为(14,14,512),再经过卷积核大小为2×2的maxpooling,图像矩阵长宽减半,变为(7,7,512)
7、执行第六步(stage6),第一个全连接将图片变为1×1×4096=4096,即(7,7,512)图像矩阵映射到4096个神经元的全连接层上,第二个再与上一个全连接进行全连接,得到神经元节点为4096的第二个全连接,最后第三个全连接,也是输出层,激活函数为softmax,可以称为softmax层,有1000个神经元节点,分别对应ImageNet竞赛数据集中1000个类别的概率。举个例子,如猫狗识别,最后只需分辨是猫还是狗两个类别,softmax层神经元节点就是2个,分别对应二者概率,若猫概率为0.76,狗概率为0.24。则认为输入的图像为猫。
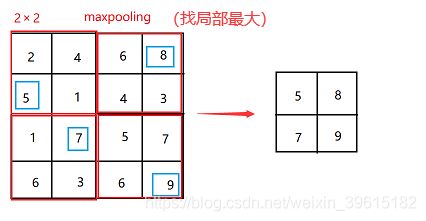
maxpooling最大值池化,从左往右stride=2,取最大值(下采样压缩过程)
2.2 VGG-19解析
VGG-19只是在stage3、4、5三个多了一个卷积块,再对特征提取了下,变化过程与VGG-16相同,一幅图说明下吧,如下。

代码实现(VGG-16为例)
#卷积块,包含Conv2D,BatchNormalization,Activation='relu'三部分
def conv_block(layer, filters, kernel_size=(3, 3), strides=(1, 1), padding='same', name=None):
x = Conv2D(filters=filters,
kernel_size=kernel_size,
strides=strides,
padding=padding,
kernel_initializer="he_normal",
name=name)(layer)
x = BatchNormalization()(x)
x = Activation('relu')(x)
return x
#--------------------------
#-----stage1
#--------------------------
x = conv_block(input_layer, filters=64, kernel_size=(3, 3), name="conv1_1_64_3x3_1")
x = conv_block(x, filters=64, kernel_size=(3, 3), name="conv1_2_64_3x3_1")
x = MaxPool2D(pool_size=(2, 2), strides=(2, 2), name="max_pool_1_2x2_2")(x)
#--------------------------
#-----stage2
#--------------------------
x = conv_block(x, filters=128, kernel_size=(3, 3), name="conv2_1_128_3x3_1")
x = conv_block(x, filters=128, kernel_size=(3, 3), name="conv2_2_128_3x3_1")
x = MaxPool2D(pool_size=(2, 2), strides=(2, 2), name="max_pool_2_2x2_2")(x)
#--------------------------
#-----stage3
#--------------------------
x = conv_block(x, filters=256, kernel_size=(3, 3), name="conv3_1_256_3x3_1")
x = conv_block(x, filters=256, kernel_size=(3, 3), name="conv3_2_256_3x3_1")
x = conv_block(x, filters=256, kernel_size=(1, 1), name="conv3_3_256_3x3_1")
x = MaxPool2D(pool_size=(2, 2), strides=(2, 2), name="max_pool_3_2x2_2")(x)
#--------------------------
#-----stage4
#--------------------------
x = conv_block(x, filters=512, kernel_size=(3, 3), name="conv4_1_512_3x3_1")
x = conv_block(x, filters=512, kernel_size=(3, 3), name="conv4_2_512_3x3_1")
x = conv_block(x, filters=512, kernel_size=(1, 1), name="conv4_3_512_3x3_1")
x = MaxPool2D(pool_size=(2, 2), strides=(2, 2), name="max_pool_4_2x2_2")(x)
#--------------------------
#-----stage5
#--------------------------
x = conv_block(x, filters=512, kernel_size=(3, 3), name="conv5_1_512_3x3_1")
x = conv_block(x, filters=512, kernel_size=(3, 3), name="conv5_2_512_3x3_1")
x = conv_block(x, filters=512, kernel_size=(1, 1), name="conv5_3_512_3x3_1")
x = MaxPool2D(pool_size=(2, 2), strides=(2, 2), name="max_pool_5_2x2_2")(x)
# FC layer 1
x = Flatten()(x)
x = Dense(4096)(x)
x = BatchNormalization()(x)
x = Dropout(0.5)(x)
x = Activation("relu")(x)
# FC layer 2
x = Dense(4096)(x)
x = BatchNormalization()(x)
x = Dropout(0.5)(x)
x = Activation("relu")(x)
# FC layer 3(softmax)
x = Dense(1000)(x)
x = BatchNormalization()(x)
x = Activation("softmax")(x)
三、VGG相较AlexNet改进详解
既然VGG是在AlexNet基础上进行改进,那么主要有哪些改进,又为什么这样改呢?带着这个问题,我们来看看吧。
3.1 小卷积核
作者将卷积核全部替换为3x3(极少用了1x1),我们知道AlexNet第一层还是用了11×11的卷积核,为啥VGG要全部替换为呢?先上一幅图再来解释

设置padding=1,stride=4,output_channel=96做卷积
我们从上图可以看出不同的卷积,最后的conv+feature参数量都差不多相同,也就是说3×3,5×5,7×7,9×9,11×11,这五个不同大小的卷积,最后参数都基本持平,也就是说,总参数对性能影响不大。但是我们可以看到calc.sum这一项,卷积核越大的计算机越大,而且不是一点点,分别对应计算规模为:1600万,4500万,1.4亿、2亿。亿级别计算量是十分惊人的。这也是卷积核用小的原因,减少计算量。
先提出一个重点:多个小卷积核的堆叠比单一大卷积核精度提升更高(敲重点),下面我们来解释

如上图:这里需要谈到感受野这一概念,简单说一下
感受野是卷积神经网络每一层输出的特征图(feature map)上的像素点在输入图片上映射的区域大小。通俗点的解释是,特征图上的一个点对应输入图上的区域,这个区域就是这个点的感受野。
详细见:感受野概念详解
上图输入的8个元素可以视为feature map的宽或者高,当输入为8个神经元经过三层conv3x3的卷积得到2个神经元。三个网络分别对应stride=1,padding=0的conv3x3、conv5x5和conv7x7的卷积核在3层、1层、1层时的结果。因为这三个网络的输入都是8,也可看出:
1、2个3x3的卷积堆叠获取到的感受野大小相当于一个5x5的卷积。
2、3个3x3的卷积堆叠获取到的感受野大小相当于一个7x7的卷积。
下图为卷积后节点个数计算公式:
如3×3卷积,stride=1,padding=0,第一次卷积后得到(8+2×0-3)/1 +1=6,第二次(6-3)/1+1=4,最后一次(4-3)/1 +1=2
再如5×5卷积,stride=1,padding=0,第一次卷积(8-5)/1+1=4,效果等同两次3×3
那么7×7卷积,(8-7)/1+1=2,效果等同于3次3×3卷积
综上:由于卷积核大小越大,计算量越大,所以VGG网络用多次小卷积代替大卷积,因为多个小卷积堆叠在分类精度上比单个大卷积要好,并且计算量显著更小。
归纳一下有时面试会问到的问题:为什么用小卷积核比用大卷积核好?
1、多个小卷积核的堆叠比单一大卷积核带来了精度提升,并且感受野没有下降,计算量还减少(最重要)
2、多个小卷积核的堆叠相比较大卷积核的非线性函数会更多,更多的卷积核的使用可使决策函数更加具有辨别能力
3、卷积层的参数减少,可以回看上面给出的图,conv param部分
3.2 小池化核
相比AlexNet的kenel_size=3x3,stride=2的池化核,VGG全部为2x2的池化核,且池化的步长stride都为2,下图为3×3的maxpooling池化图,VGG中卷积核kernel size大小均为2x2,卷积核变小是为了捕获更细节的信息,即以2×2的网格从左到右、从上到下进行扫描,常见2x2的max-pooling,少见3x3或者更大的卷积核kernel。更大的kernel带来的问题是信息丢失带来的信息损失,因为如果池化的卷积核比较大的话,对应n×n网格就大,如4×4的话就是从16个里选一个最大值,这丢失的信息会较大,导致最终模型性能不高,此外,stride通常为2。

在这儿稍微补充一点:在VGG的全连接层,参数作出了些调整,高斯分布初始化(std=0.005),bias常数初始化(0.1),作者实验validate发现这个值比之前AlexNet设置的(std=0.01,bias=0)要更好。这也可以借鉴为以后调参小技巧。
3.3 层数更深特征图更宽
基于前两点外,由于卷积核专注于扩大通道数、池化专注于缩小宽和高,使得模型架构上更深更宽的同时,计算量的增加放缓,即慢慢增加,就像任务量慢慢增大;
3.4 全连接转卷积
网络测试阶段将训练阶段的三个全连接替换为三个卷积,测试重用训练时的参数,使得测试得到的全卷积网络因为没有全连接的限制,因而可以接收任意宽或高为的输入。如何理解上面这句话呢,我们来解释解释.。
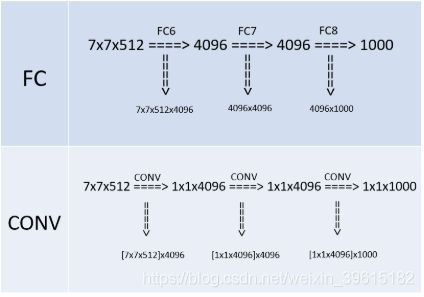
上半部分是训练阶段,此时最后三层都是全连接层,下半部分是测试阶段,最后三层都是卷积层。
训练阶段
有4096个输出的全连接层FC6的输入是一个7x7x512的feature map,因为全连接层的缘故,不需要考虑局部性, 可以把7x7x512看成一个整体,25508(=7x7x512)个输入的每个元素都会与输出的每个元素(或者说是神经元)产生连接,所以每个输入都会有4096个系数对应4096个输出,所以网络的参数(也就是两层之间连线的个数,也就是每个输入元素的系数个数)规模就是7x7x512x4096。对于FC7,输入是4096个,输出是4096个,因为每个输入都会和输出相连,即每个输出都有4096条连线(系数),那么4096个输入总共有4096x4096条连线(系数),最后一个FC8计算方式一样。
预测阶段(重难点)
由于换成了卷积,第一个卷积后要得到4096(或者说是1x1x4096)的输出,那么就要对输入的7x7x512的feature map的宽高(即width、height维度)进行降维,同时对深度(即Channel/depth维度)进行升维。要把7x7降维到1x1,那么干脆直接一点,就用7x7的卷积核就行,另外深度层级的升维,因为7x7的卷积把宽高降到1x1,如下图,(7,7,512)的特征图通过和自己一摸一样大小的卷积核(7,7,512),得到一个1×1的特征图,然后有4096组,即图中绿色一直堆到红色,有4096个“神经元”,最后得到了1x1x4096的feature map。这其中卷积的参数量上,把7x7x512看做一组卷积参数,因为该层的输出是1×1×4096=4096,那么相当于要有4096组这样7x7x512的卷积参数,那么总共的卷积参数量就是[7x7x512]x4096,这里将7x7x512用中括号括起来,目的是把这看成是一组。

第二个卷积依旧得到1x1x4096的输出,因为输入也是1x1x4096,三个维度(宽、高、深)都没变化,可以很快计算出这层的卷积的卷积核大小也是1x1,而且,通道数也是4096,因为对于输入来说,1x1x4096是一组卷积参数,即一个完整的filter,那么考虑所有4096个输出的情况下,卷积参数的规模就是[1x1x4096]x4096,最后一个卷积参数[1x1x4096]x1000原理一样。
为什么要将全连接层变为卷积层?
答:对于传统的 CNN(即包含全连接层),一个确定的网络其输入图像的大小是固定的,比如 CaffeNet 的输入须是 227×227,那么对于更大的图像,在检测时就需要裁剪出很多 227×227 的小图像分别送入 CNN 网络中,使得检测任务十分耗时。
而网络需要输入固定大小图像的主要原因就是有全连接层,当把全连接层替换成了卷积层后,就可以不限制输入图像的大小,一次性输入网络即可获得一张图片所有位置的检测目标概率
固定大小是说送入网络训练的每一个数据大小需要一样,可以全都是 227×227,也可以全都是 224×224,只要统一就行。
这样要求的原因是全连接层与前一层连接时,参数数量需要预先设定好。不同于卷积操作,卷积核的参数数量就是卷积核大小,它与前一层的 特征图(feature map )多大没有关系,但是全连接层的参数是随着前一层 feature map 的大小变化而变化的,因为与上一层全连接,当输入图像大小不同,全连接层之前得到的 feature map 大小也不一样,那么全连接层的参数数量就不能确定,所以必须固定输入图像的大小。全连接换成卷积后,带来可以处理任意分辨率(在整张图)上计算卷积,而无需对原图resize的优势。
总结:全连接变卷积就是使网络可以处理任意大小的输入图像,而无需像全连接一样必须固定输入图片的大小,不固定全连接层参数规模就无法确定。
以上就是对VGG网络的全部解析。
VGG改进详解参考:https://blog.csdn.net/jyy555555/article/details/80515562
