机器学习读书笔记:线性模型
文章目录
- 前言
- 线性回归
-
- 一元线性回归
- 一元线性回归python代码
- 多元线性回归
- 多元线性回归python代码
- 二分类问题
-
- 对数机率回归
- LDA-线性判别分析
- 多分类问题
-
-
- 1对1 O(One) v O(One)
- 一对其他 O(One) v R(Rest)
- 多对多 M(Many) v M & ECOC
-
- 类别不平衡
前言
从线性模型开始,就开始涉及到不同的学习算法和模型了。根据预测结果的不同,可以有几种类型的问题:
- 回归问题,也就是预测值为连续值, y ∈ R y \in R y∈R。
- 分类问题,也就是预测值为离散值, y ∈ [ C 1 , C 2 . . . C n ] y \in [C_1, C_2 ... C_n] y∈[C1,C2...Cn]。
- 还有一种是一种特定的分类问题,也就是二分类。 y ∈ [ T R U E , F A L S E ] y \in [TRUE, FALSE] y∈[TRUE,FALSE]。
我自己对学习的理解就是想学习获得一个属性集合 X X X到预测值 y y y的一个映射: f ( x ) , x ∈ X f(x), x\in X f(x),x∈X。 f ( x ) f(x) f(x)是未知的,机器学习的任务就是通过数据去猜 f ( x ) f(x) f(x)长什么样。但是猜不能瞎猜,得有章法的猜。线性模型就时假设预测值与属性集合之间是一个线性关系。后续的各种模型就是各种不同的猜法。
线性回归
一元线性回归
拿之前的栗子来说,假设火车晚点只与下雨的雨量有关系,而且假设雨量与晚点的时间成线性关系。那么这就是一个典型的一元线性回归问题。这个函数我们在初高中就学过:
y = a x + b y=ax + b y=ax+b
如果我们确定了等号右侧的参数a和b,每来一个数据属性x,自然就可以计算得到预测值y。
那么怎么得到参数a和b呢。当然是用已知的数据集,假设有数据集 D = { ( x i , y i ) } i = 1 m D=\{(x_i, y_i)\}_{i=1}^m D={(xi,yi)}i=1m,也就是说有m个(x, y)这样的数据样本集。我们需要获得一个(a, b)参数,这个参数是的映射 f ( x ) f(x) f(x)在数据集 D D D上的输出与标记值的差异最小。那么怎么计算差异呢,直接计算输出值与标记值之间的差值就好: f ( x ) − y f(x) - y f(x)−y,但是因为会对所有的样本差异进行求和,此时会正负抵消,所以我们加个平方,变成:
∑ i = 1 m ( f ( x i ) − y i ) 2 \sum_{i=1}^m{(f(x_i)-y_i)^2} i=1∑m(f(xi)−yi)2
然后因为 f ( x ) = a x + b f(x)=ax+b f(x)=ax+b,就把公式变成:
∑ i = 1 m ( y i − a x i − b ) 2 \sum_{i=1}^m{(y_i-ax_i-b)^2} i=1∑m(yi−axi−b)2
然后就是对a和b求偏导(各种公式变换,有兴趣的可以去看一下,编辑公式太费劲),就可以得到a和b的取值了。
让这样一个数据偏差的乘方最小的方法就叫做**“最小二乘法”**。
a = ∑ i = 1 m y i ( x i − x ‾ ) ∑ i = 1 m x i 2 − 1 m ( ∑ i = 1 m x i ) 2 a =\frac{\sum_{i=1}^m{y_i(x_i-\overline{x})}}{\sum_{i=1}^m{x_i^2} - \frac{1}{m}(\sum_{i=1}^m{x_i})^2} a=∑i=1mxi2−m1(∑i=1mxi)2∑i=1myi(xi−x)
b = 1 m ∑ i = 1 m ( y i − a x i ) b = \frac{1}{m}\sum_{i=1}^m{(y_i-ax_i)} b=m1i=1∑m(yi−axi)
我们用点数据来试一下。
一元线性回归python代码
关于雨量和晚点的问题,假设我们有10个样本:
(50, 3)
(45, 2.4)
(70, 4)
(75, 4.2)
(80, 4.1)
(30, 2)
(90, 7)
(80, 4.3)
(65, 3.5)
(70, 4.3)
将点画到坐标系中,再通过计算得到a和b(下面有python代码),然后画一根 y = a x + b y=ax+b y=ax+b的直线:
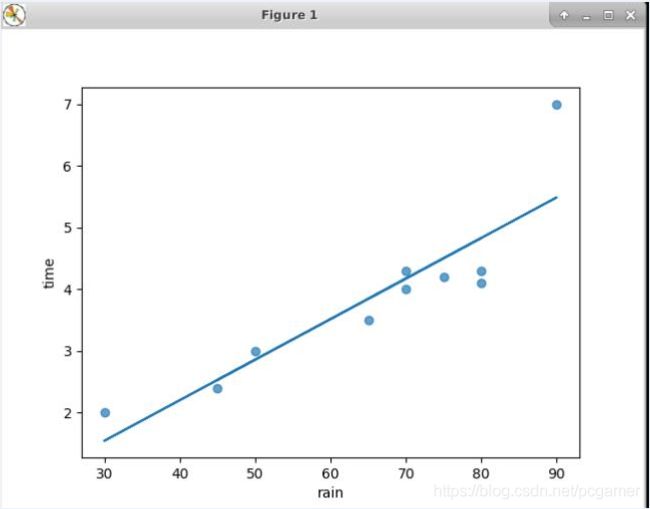
可以看出,基本上还是贴着这些点过去的。
附代码如下:
import numpy as np;
import matplotlib.pyplot as plt;
x = [50,45,70,75,80,30,90,80,65,70];
y = [3,2.4,4,4.2,4.1,2,7,4.3,3.5,4.3];
plt.scatter(x,y,alpha=0.7)
plt.xlabel('rain');
plt.ylabel('time');
avarage_x = np.sum(x)/len(x);
a = np.sum(np.multiply(y,(x-avarage_x)));
b = np.sum(np.multiply(x,x));
c = np.sum(x)*np.sum(x)/len(x);
w = a/(b-c);
print(w);
b = np.sum(np.subtract(y,np.multiply(w,x)))/len(x);
print(b);
y_= np.multiply(w,x)+b;
plt.plot(x,y_);
plt.show();
多元线性回归
假设上面的a不止一个属性,比如上面的问题变成火车晚点由“雨量”、“乘车人数”、“风级”等一堆七七八八的原因导致,那么我们就需要获得这些属性的值。我们可以把 a a a从一个标量变成矢量 a T a^T aT。
f ( x i ) = a T x i + b f(x_i) = a^Tx_i + b f(xi)=aTxi+b
更进一步的,把常量 b b b也弄到向量里:令 a ^ = ( a T ; b ) \hat{a} = (a^T;b) a^=(aT;b)。
和一元线性回归类似,我们也是使用最小二乘法去获得参数向量 a ^ \hat{a} a^。
把m个样本的d个属性组成一个矩阵 X X X,因为属性向量 a ^ \hat{a} a^将常量 b b b放进去了,为了满足矩阵乘法运算,所以将矩阵 X X X的最后一列置为1:
X = [ x 11 x 12 . . . x 1 d 1 x 21 x 12 . . . x 1 d 1 . . . . . . . . . . . . 1 x m 1 x m 2 . . . x m n 1 ] X = \begin{bmatrix}x_{11}&x_{12}&...&x_{1d}&1\\ x_{21}&x_{12}&...&x_{1d}&1\\ ...&...&...&...&1\\ x_{m1}&x_{m2}&...&x_{mn}&1\end{bmatrix} X=⎣⎢⎢⎡x11x21...xm1x12x12...xm2............x1dx1d...xmn1111⎦⎥⎥⎤
“最小二乘法”的矩阵式为,求得一个向量 a ^ \hat{a} a^,使得:
a ^ = m i n ( y − X a ) T ( y − X a ) \hat{a} = min(y-Xa)^T(y-Xa) a^=min(y−Xa)T(y−Xa)
这里所有的乘法、减法都是矩阵计算,第一个括号里的 ( y − X a ) T (y-Xa)^T (y−Xa)T是对计算后的矩阵 ( y − X a ) (y-Xa) (y−Xa)进行转置操作。转置之后恰好可以与原矩阵 ( y − X a ) (y-Xa) (y−Xa)相乘,达到了和标量类似的 ( y − f ( x ) ) 2 (y-f(x))^2 (y−f(x))2的效果。
同样,对上面的公式进行求导并使求导后的式子等于0得到:
2 X T ( X a − y ) = 0 X T X a = X T y a = ( X T X ) − 1 X T y 2X^T(Xa-y) = 0 \\ X^TXa = X^Ty \\ a = (X^TX)^{-1}X^Ty 2XT(Xa−y)=0XTXa=XTya=(XTX)−1XTy
公式里的 ( X T X ) − 1 (X^TX)^{-1} (XTX)−1是X的转置乘以X之后矩阵的逆矩阵。
在很多情况下,矩阵 ( X T X ) (X^TX) (XTX)是不可逆的。这里我讲下我理解的工程:
- 矩阵 X X X是一个 m ∗ d m*d m∗d的矩阵,m为样本数(行数);d为属性数(列数);那么转置矩阵 X T X^T XT就是一个 d ∗ m d*m d∗m的矩阵。 X T X X^TX XTX就是一个 d ∗ d d*d d∗d的矩阵。
- 在很多情况下,样本的属性数是远大园样本数的,也就是 d > m d>m d>m。这就是在矩阵 ( X T X ) (X^TX) (XTX)中有很多为0的整行,这样的矩阵是不可逆的。具体是啥原因,大家可以去翻一下矩阵相关的数学书,和矩阵的秩啊、行列式啊等七七八八的概念有关。
不可逆的话也不是说没办法,只是说无法求得准确的解析解。
- 如果选择偏好的话,也就是选择其中某些属性集 d ′ d\prime d′,就可以组成一个可逆的矩阵进行计算,因为这样的 d ′ d\prime d′集合有多个,所以就要选择偏好,比如那些重要的参数组成这个属性集。常见的做法是引入正则化
- 使用梯度下降法进行求解。
多元线性回归python代码
假设上面就是加入了乘车人数这一个属性,同样的搞10个样本出来:
(雨量,乘车人数,晚点时间)
(50, 100, 3)
(45, 80, 2.4)
(70, 120, 4)
(75, 140, 4.2)
(80, 120, 4.1)
(30, 80, 2)
(90, 140, 7)
(80, 100, 4.3)
(65, 90, 3.5)
(70, 95, 4.3)
通过 ( X T X ) − 1 X T y (X^TX)^{-1}X^Ty (XTX)−1XTy来计算得到 a a a值。
参考代码:
import numpy as np;
import matplotlib.pyplot as plt;
x_1 = [50,45,70,75,80,30,90,80,65,70];
x_2 = [100,80,120,140,120,80,140,100,90,95];
b = [1,1,1,1,1,1,1,1,1,1];
y = [3,2.4,4,4.2,4.1,2,7,4.3,3.5,4.3];
X=[];
X.append(x_1);
X.append(x_2);
X.append(b);
Y=[]
Y.append(y);
X_T=np.matrix(X);
X_=np.matrix(np.transpose(X));
Y_=np.matrix(np.transpose(Y));
A = X_T*X_;
tt= A.I*X_T;
w = A.I*X_T*Y_
print(w)
print('new value coming: x=(100, 130)');
x1_new = 100;
x2_new = 130;
x_new = [100, 130, 1];
NEW = [];
NEW.append(x_new);
NEW_ = np.matrix(NEW);
y_new = NEW_*w
print('the new value is: ')
print(y_new);
计算得到的a值:
[[ 0.05277084]
[ 0.01405861]
[-1.07373189]]
结果:
new value coming: x=(100, 130)
the new value is:
[[6.03097126]]
预测在雨量100,乘车人数130的情况下,会晚点6分钟。
二分类问题
对数机率回归
书上给出了一个广义线性模型的概念,也就是说在上面提到的线性模型 ( a T x + b ) (a^Tx + b) (aTx+b)的基础上,可以再叠加一个单调可微函数 g ( x ) g(x) g(x),同样是满足线性关系。
然后再引入一个函数Sigmold函数:
g ( x ) = 1 1 + e − z g(x) = \frac{1}{1+e^{-z}} g(x)=1+e−z1
那么x,y的映射关系就变成了:
y = 1 1 + e − ( a T + b ) y = \frac{1}{1+e^{-(a^T+b)}} y=1+e−(aT+b)1
将这个公式两边再变化一下:
l n y 1 − y = a T + b ln\frac{y}{1-y}=a^T+b ln1−yy=aT+b
通过这个公式就可以看出, y 1 − y \frac{y}{1-y} 1−yy中,可以将y视作样本x为正例的比例,那么1-y就正好是样本x为反例的比例。两者一比基本上就可以看做是正例与反例的比例,也可以看做是正例的机率。再取个对数操作,所以叫做对数机率回归。
如果是满足对数机率回归的 ( x T , y ) (x^T,y) (xT,y)的分类问题,需要使用梯度下降的方法来求解a和b。那个后续再说吧。
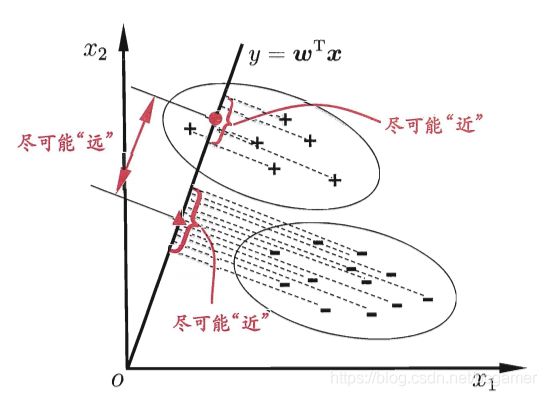
LDA-线性判别分析
LDA的思想是,计算每个正例和反例点到某条直线(二维),或者平面(三维)上的投影,多维的情况也是投影计算。通过各种计算方法得到一个 ω \omega ω,是的正例之间的投影距离和最小,而反例和正例之间的投影距离最大。
至于后面那一串公式,实在看不懂。后续再说吧。
多分类问题
多分类问题,可以看成是多个二分类问题的组合。那么对于问题的拆分组合,有三种方式:
1对1 O(One) v O(One)
假设总体样本总共有N类,那么对N个样本分类进行一一配对,总共会有 N ( N − 1 ) / 2 N(N-1)/2 N(N−1)/2中配对,每一个配对就是一个二分类问题。假设分类 C i C_i Ci和 C j C_j Cj在一个配对中,可以假设 C i C_i Ci为正例, C j C_j Cj为反例进行二分类训练。把同一个样本放到所有的 N ( N − 1 ) / 2 N(N-1)/2 N(N−1)/2个分类器中去,每一个样本就有 N ( N − 1 ) / 2 N(N-1)/2 N(N−1)/2个输出结果。此时就可以做一个决策问题了,比如最简单的,那种分类占比大就选哪个。
一对其他 O(One) v R(Rest)
假设总体样本总共有N类,首先挑出一个分类 C i C_i Ci,将此类别作为正例,其他的都作为反例进行训练和输出。可以总共准备N个这样的分类算法,每次都选择一个 C i C_i Ci作为正例,其他作为反例进行训练和测试。样本进入每个这个N个学习算法进行输出,同样需要做一个决策问题,可以选占比最大的那个,或者是置信度最高的那一个等等。
和OvO方式相比:OvR只需要训练N个算法就可以了,而OvO需要训练 N ( N − 1 ) / 2 N(N-1)/2 N(N−1)/2个算法。明显是OvR比较划算。但是OvO每个算法的训练样本量是要低于OvR的,因为OvR的每个算法训练都需要将所有的样本进行训练,而OvO只需要将配对的相应类别( C i , C j C_i, C_j Ci,Cj)的样本进行训练即可。所以,如果类别比较多的话,OvO的计算量也许还会小一点。
多对多 M(Many) v M & ECOC
多对多的话就没那么极端,选出若干个类别来作为正例,剩下的若干类别就成为反例。那么就有两个问题:
- 怎么分?
- 训练完了怎么决策?
直接来看一个比较常用的策略:ECOC(纠错输出码:Error Correcting Output Codes)。
这个书上文字描述的挺绕,举个栗子简单一点,假设我们有一个5分类的问题,
-
第一步就是把这些类别进行划分,N个类别进行M次划分,分别作为正例和反例,在ECOC方法中就叫做编码。
假设我们令M=4:
M1:{1, 3}为正例,{2,4,5}为反例。训练出来的算法为 f 1 ( x ) f_1(x) f1(x)。那么 f 1 ( x ) f_1(x) f1(x)对5个类别的编码情况如下(1表示正例,-1表示反例):
1, -1, 1, -1, -1
M2:{2, 5}为正例,{1,3,4}为反例。训练出来的算法为 f 2 ( x ) f_2(x) f2(x)。那么 f 2 ( x ) f_2(x) f2(x)对5个类别的编码情况如下(1表示正例,-1表示反例):
-1, 1, -1, -1, 1
M3:{2, 3, 5}为正例,{1,4}为反例。训练出来的算法为 f 3 ( x ) f_3(x) f3(x)。那么 f 3 ( x ) f_3(x) f3(x)对5个类别的编码情况如下(1表示正例,-1表示反例):
-1, 1, 1, -1, 1
M4:{3, 5}为正例,{1,2,4}为反例。训练出来的算法为 f 4 ( x ) f_4(x) f4(x)。那么 f 4 ( x ) f_4(x) f4(x)对5个类别的编码情况如下(1表示正例,-1表示反例):
-1, -1, 1, -1, 1
建立一个和书上类似的矩阵,这就完成了编码:
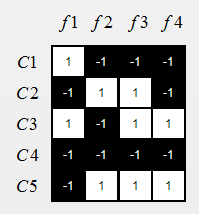
-
把测试样本丢到算法中去进行预测(解码):
总共有2个样本如下:
(x, y)
(100, 1)
(132, 2)
假设第一个样本的预测值为: f 1 : 1 , f 2 : − 1 , f 3 : − 1 , f 4 : − 1 f_1: 1, f2: -1, f_3: -1, f_4: -1 f1:1,f2:−1,f3:−1,f4:−1,那么,拿这个编码去上面的矩阵中匹配行,明显能匹配上C1行,那么这个样本的预测值就是1。
什么情况下纠错呢,假设第二个样本的预测值为: f 1 : − 1 , f 2 : 1 , f 3 : − 1 , f 4 : − 1 f_1: -1, f2: 1, f_3: -1, f_4: -1 f1:−1,f2:1,f3:−1,f4:−1。此时,算法 f 3 f_3 f3对样本判断失误。所以这个编码与上述编码矩阵中的每一行都匹配不上,此时,就需要求这个编码与每一行的距离了。以海明距离为例:此错误编码与C1的海明距离为2,与C2的海明距离为1,C3为4,C4为1,C5为4。此时,可能会被判断为C2类或者C5类。
这个时候能看出,如果某个算法发生错误,实际上是可以通过编码的距离来进行纠错的。
但是为啥我们这还是出了两个类别呢,这是因为我们的M不够多,对于有限类别,M的越多,纠错能力就越强,比如M=7。那么每个编码的码长就越长,错一个与其他编码的重复概率就会降低,有兴趣的可以去看一看编码相关的内容。
但是增加编码的代价是要增加算法的个数,也就也为这增加训练的计算量。
类别不平衡
假设训练样本中的正例、反例比例不平均,1000个样本中10个正例,990个反例。那么此时训练出来的算法对正例的判断能力是不够的,但是如果反例多的话,学习算法的准确率还是能达到99%。这样的算法是没有太大用处的。
解决这个问题的策略就是“再缩放”,简单的说就是减少这个比例的差异。
- 对反例进行“欠采样”,就是丢掉一些反例,自然训练集中的正例、反例比例下降了
- 对正例进行“过采样”,在正例里重复引入一些正例样本做为训练集。但是这样可能会破坏样本的一些分布信息。