YOLOX网络结构详解
论文名称:YOLOX: Exceeding YOLO Series in 2021
论文下载地址:https://arxiv.org/abs/2107.08430
论文对应源码地址:https://github.com/Megvii-BaseDetection/YOLOX
文章目录
-
- 0 前言
- 1 网络结构
- 2 Anchor-Free
- 3 损失计算
- 4 正负样本匹配策略SimOTA
0 前言
在之前文章中我们已经聊过YOLO v5了,今天我们再来聊聊YOLOX。YOLOX是旷视科技在2021年发表的一篇文章,当时主要对标的网络就是很火的YOLO v5,如果对YOLO v5不了解的可以看下我之前的文章。那么在YOLOX中引入了当年的哪些黑科技呢,简单总结主要有三点,decoupled head、anchor-free以及advanced label assigning strategy(SimOTA)。YOLOX的性能如何呢,可以参考原论文图一,如下图所示,YOLOX比当年的YOLO v5略好一点,并且论文中说他们利用YOLOX获得了当年的Streaming Perception Challenge的第一名。那这里可能有人会问了,在自己的项目中YOLO v5和YOLOX到底应该选择哪个。我个人的建议是,如果你的数据集图像分辨率不是很高,比如640x640,那么两者都可以试试。如果你的图像分辨率很高,比如1280x1280,那么我建议使用YOLO v5。因为YOLO v5官方仓库有提供更大尺度的预训练权重,而YOLOX当前只有640x640的预训练权重(YOLOX官方仓库说后续会提供更大尺度的预训练权重,可过了快一年了还没有音讯)。


1 网络结构
下图是我根据源码绘制的YOLOX-L网络结构。因为它是基于YOLO v5构建的,所以Backbone以及PAN部分和YOLO v5是一模一样的,注意这里说的YOLO v5是对应tag:v5.0版本的,而我们之前讲的YOLO v5文章中是tag:v6.1版本,所以在Backbone部分有些细微区别,大家自行对比一下就知道了,这里不去赘述。如果看不懂的可以翻下之前写的YOLO v5文章。

那YOLOX和YOLO v5在网络结构上有什么差别呢,主要的差别就在检测头head部分。之前的检测头就是通过一个卷积核大小为1x1的卷积层实现的,即这个卷积层要同时预测类别分数、边界框回归参数以及object ness,这种方式在文章中称之为coupled detection head(耦合的检测头)。作者说采用coupled detection head是对网络有害的,如果将coupled detection head换成decoupled detection head(解耦的检测头)能够大幅提升网络的收敛速度。在论文的图3中展示了YOLO v3分别使用coupled detection head和decoupled detection head的训练收敛情况,明显采用decoupled detection head后收敛速度会更快(在论文的表2中显示采用decoupled detection head能够提升AP约1.1个点)。说句题外话相比与YOLO v3我更关心对于YOLO v5能提升多少AP,但文章中并没有相关数据。

那decoupled detection head到底长啥样,根据原论文的图2以及源码绘制的decoupled detection head结构如下。在decoupled detection head中对于预测Cls.、Reg.以及IoU参数分别使用三个不同的分支,这样就将三者进行了解耦。这里需要注意一点,在YOLOX中对于不同的预测特征图采用不同的head,即参数不共享。

2 Anchor-Free
近几年有关Anchor-Free的网络也层出不穷,之前我们也聊过一个Anchor-Free的网络FCOS,如果不了解的建议看下之前的文章。今天讲的YOLOX也是一个Anchor-Free的网络,并且借鉴了FCOS中的思想。刚刚在上面我们已经简单聊到了YOLOX的decoupled detection head,它对预测特征图(feature map/Grid 网格)上的每一个位置都预测了 n u m c l s + 4 + 1 num_{cls}+4+1 numcls+4+1个参数,其中 n u m c l s num_{cls} numcls代表检测的目标类别数,4代表网络预测的目标边界框参数,1代表object ness(图中标的是IoU.)。
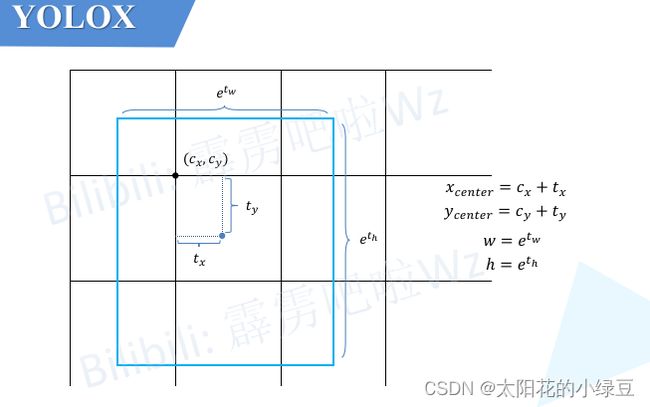
由于YOLOX是Anchor-Free的网络,所以head在每个位置处直接预测4个目标边界框参数 [ t x , t y , t w , t h ] [t_x, t_y, t_w, t_h] [tx,ty,tw,th]如下如所示,这4个参数分别对应预测目标中心点相对Grid Cell左上角 ( c x , c y ) (c_x, c_y) (cx,cy)的偏移量,以及目标的宽度、高度因子,注意这些值都是相对预测特征图尺度上的,如果要映射回原图需要乘上当前特征图相对原图的步距stride。
关于如何将预测目标边界框信息转换回原图尺度可参考源码中decode_outputs函数(在源码项目中的yolox -> models -> yolo_head.py文件中):
def decode_outputs(self, outputs, dtype):
grids = []
strides = []
for (hsize, wsize), stride in zip(self.hw, self.strides):
yv, xv = meshgrid([torch.arange(hsize), torch.arange(wsize)])
grid = torch.stack((xv, yv), 2).view(1, -1, 2)
grids.append(grid)
shape = grid.shape[:2]
strides.append(torch.full((*shape, 1), stride))
grids = torch.cat(grids, dim=1).type(dtype)
strides = torch.cat(strides, dim=1).type(dtype)
outputs[..., :2] = (outputs[..., :2] + grids) * strides # 预测目标边界框中心坐标
outputs[..., 2:4] = torch.exp(outputs[..., 2:4]) * strides # 预测目标边界框宽度和高度
return outputs
3 损失计算
由于在网络的检测头中有Cls.分支、Reg.分支以及IoU.分支(其实是Obj.分支),所以损失由 L c l s L_{cls} Lcls、 L r e g L_{reg} Lreg以及 L o b j L_{obj} Lobj这三部分组成,个人感觉如果把 L o b j L_{obj} Lobj换成 L I o U L_{IoU} LIoU会更合理。其中 L c l s L_{cls} Lcls和 L o b j L_{obj} Lobj采用的都是二值交叉熵损失(BCELoss)而 L r e g L_{reg} Lreg采用的是IoULoss。还要注意的是, L c l s L_{cls} Lcls以及 L r e g L_{reg} Lreg只计算正样本的损失,而 L o b j L_{obj} Lobj既计算正样本也计算负样本的损失。
L o s s = L c l s + λ L r e g + L o b j N p o s Loss = \frac{L_{cls} + \lambda L_{reg}+L_{obj}}{N_{pos}} Loss=NposLcls+λLreg+Lobj
其中:
- L c l s L_{cls} Lcls代表分类损失
- L r e g L_{reg} Lreg代表定位损失
- L o b j L_{obj} Lobj代表obj损失
- λ \lambda λ代表定位损失的平衡系数,源码中设置是
5.0 - N p o s N_{pos} Npos代表被分为正样的
Anchor Point数
4 正负样本匹配策略SimOTA
SimOTA是我个人认为比较难理解的部分,主要是源码看的头大。训练网络时就是通过SimOTA来进行正负样本的匹配。而SimOTA是由OTA(Optimal Transport Assignment)简化得到的,OTA也是旷视科技同年出的一篇文章,论文名称叫做《Optimal transport assignment for object detection》,有兴趣的可以自己了解一下。根据原论文中的表二,可以看到,在YOLO v3的基准上使用SimOTA后能够给AP带来2.3个点的提升。其实我这里有个疑问,这个SimOTA对于YOLO v5能够带来多少提升,如果对YOLO v5也能带来两个多点的提升那不是YOLO v5又把YOLOX给反超了?

那OTA究竟是什么呢?下面是论文中的原话:
Specifically, OTA [4] analyzes the label assignment from a global perspective and formulate the assigning procedure as an Optimal Transport (OT) problem, producing the SOTA performance among the current assigning strategies [12, 41, 36, 22, 37].
简单来说,就是将匹配正负样本的过程看成一个最优传输问题。关于最优传输理论,说实话我不太了解所以就不展开细讲,这里为了方便理解就举个简单的例子。如下图所示,假设有1到6共6个城市(图中的五角星),有2个牛奶生产基地A和B。现在要求这两个牛奶生产基地为这6个城市送牛奶,究竟怎样安排才能最小化运输成本。假设运输成本(cost)仅由距离决定,那么很明显城市1、2、3由牛奶生产基地A负责,城市4、5、6由牛奶生产基地B负责,运输成本最低。

那么在SimOTA正负样本匹配过程中,城市对应的是每个样本(对应论文中的anchor point,其实就是grid网格中的每个cell),牛奶生产基地对应的是标注好的GT Bbox,那现在的目标是怎样以最低的成本(cost)将GT分配给对应的样本。根据论文中的公式1,cost的计算公式如下,其中 λ \lambda λ为平衡系数,代码中设置的是3.0:
c i j = L i j c l s + λ L i j r e g c_{ij}=L_{ij}^{cls}+\lambda L_{ij}^{reg} cij=Lijcls+λLijreg
通过公式可以得知,成本cost由分类损失和回归损失两部分组成,并且网络预测的类别越准确cost越小,网络预测的目标边界框越准确cost越小。那么最小化cost可以理解为让网络以最小的学习成本学习到有用的知识。看到这里如果不理解也没关系,后面会有更详细的例子。
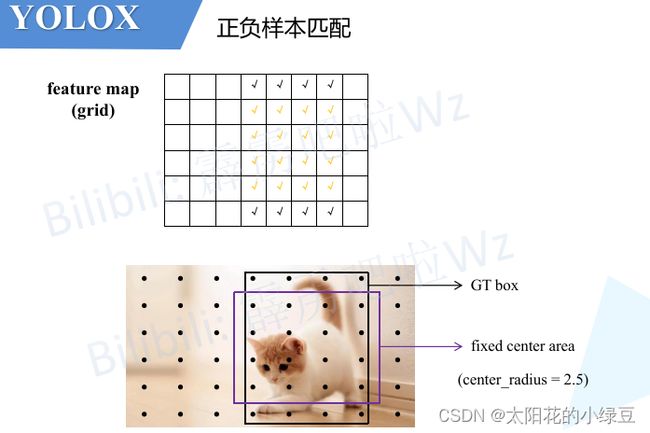
刚刚在上面有提到,城市对应的是每个样本(对应论文中的anchor point,其实就是grid网格中的每个cell),那是不是所有的样本都要参与cost的计算呢,当然不是。这里先回忆一下之前讲过的FCOS网络,它是如何匹配正负样本的?它是将那些落入GT中心sub-box范围内的样本视为正样本,其他的都视为负样本。那在SimOTA中,也有个类似的预筛选过程,通过阅读源码分析得到它首先会将落入目标GT Bbox内或落入fixed center area内的样本给筛选出来,在源码中作者将center_ratius设置为2.5,即fixed center area是一个5x5大小的box。如下图所示,feature map(或者称grid网格)中所有打勾的位置都是通过预筛选得到的样本(anchor point)。注意,这里将落入GT Bbox与fixed center area相交区域内的样本用橙色的勾表示。
接着计算网络在这些样本(anchor point)位置处的预测值(目标类别以及目标边界框)和每个GT的 L i j c l s L_{ij}^{cls} Lijcls以及 L i j r e g L_{ij}^{reg} Lijreg(由于回归损失是IoULoss,所以这里也知道每个样本和每个GT的IoU),然后再计算每个样本和每个GT之间的cost。这里需要注意下,在代码中计算cost的过程如下,和论文中给的公式有一点点区别:
cost = (
pair_wise_cls_loss
+ 3.0 * pair_wise_ious_loss
+ 100000.0 * (~is_in_boxes_and_center)
)
其中:
pair_wise_cls_loss就是每个样本与每个GT之间的分类损失 L i j c l s L_{ij}^{cls} Lijclspair_wise_ious_loss是每个样本与每个GT之间的回归损失 L i j r e g L_{ij}^{reg} Lijregis_in_boxes_and_center代表那些落入GT Bbox与fixed center area交集内的样本,即上图中橙色勾对应的样本,然后这里进行了取反~表示不在GT Bbox与fixed center area交集内的样本(非橙色样本),即上图中黑色勾对应的样本。接着又乘以100000.0,也就是说对于GT Bbox与fixed center area交集外的样本cost加上了一个非常大的数,这样在最小化cost过程中会优先选择GT Bbox与fixed center area交集内的样本。
接下来介绍如何利用cost去进行正负样本的匹配,以下内容全部是按照源码中的计算流程进行讲解,可能没那么容易理解,如果想看懂源码的话建议多看几遍。
-
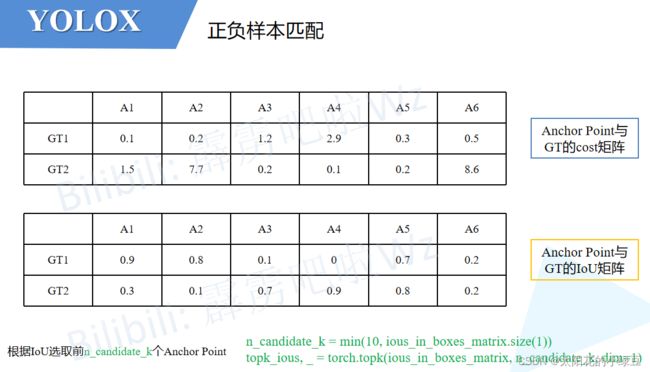
首先构建两个矩阵,一个是之前筛选出的Anchor Point与每个GT之间的cost矩阵,另一个是Anchor Point与每个GT之间的IoU矩阵。接着计算
n_candidate_k并结合IoU对Anchor Point做进一步筛选(保留IoU大的Anchor Point),n_candidate_k是取10和Anchor Point数量之间的最小值,在下面给的这个示例中由于Anchor Point数量为6,所以n_candidate_k=6故保留所有的Anchor Point(下面示例中的值都是我随手写的,不必深究)。
-
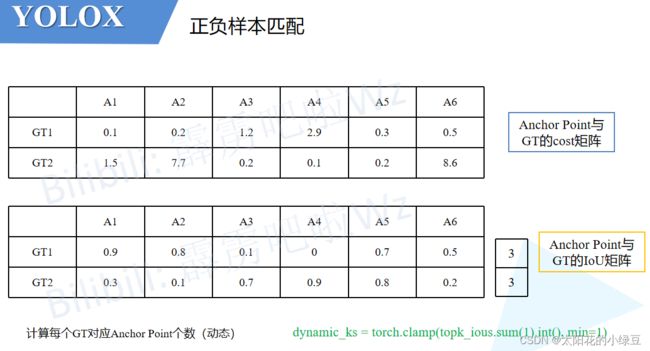
接着对每个GT计算剩下所有的Anchor Point的IoU之和然后向下取整得到针对每个GT所采用的正样本数量,即代码中计算得到的
dynamic_ks(这个计算过程对应论文中的Dynamic k Estimation Strategy)。对于下面的示例,GT1的所有Anchor Point的IoU之和为3.0向下取整就是3所以对于GT1有3个正样本,同理GT2也有3个正样本。
-
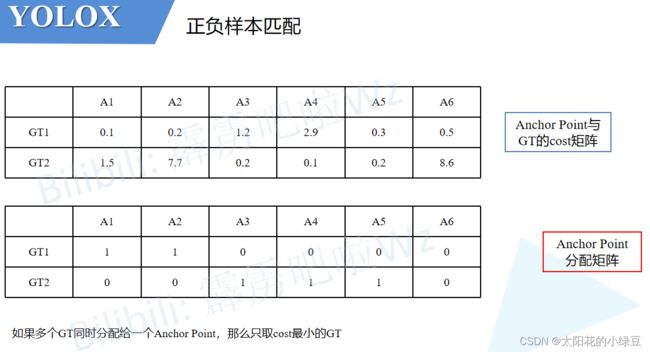
然后根据刚刚计算得到的
dynamic_ks(每个GT对应几个正样本)和cost矩阵找出所有的正样本(根据cost的数值大小)。比如对于示例中的GT1,刚刚计算采用3个正样本,然后看下GT1和所有Anchor Point的cost,按照从小到大的顺序将前3小的Anchor Point找出来,即示例中的A1、A2和A5。同理对于GT2,cost排前3的是A3、A4和A5。根据以上结果,我们可以再构建一个Anchor Point分配矩阵,记录每个GT对应哪些正样本,对应正样本的位置标1,其他位置标0。

-
按照示例我们会发现一个问题,即GT1和GT2同时分配给了
A5。作者为了解决这个带有歧义的问题,又加了一个判断。如果多个GT同时分配给一个Anchor Point,那么只选cost最小的GT。在示例中,由于A5与GT2的cost小于与GT1的cost,故只将GT2分配给A5。
根据以上流程就能找到所有的正样本以及正样本对应的GT了,那么剩下的Anchor Point全部归为负样本。
到此,有关YOLOX的内容就基本讲完了。如果觉得这篇文章对你有用,记得点赞、收藏并分享给你的小伙伴们哦。