自编Matlab代码实现MPC定点跟踪
自编Matlab代码实现MPC(线性)定点跟踪
这篇文章是在上一篇的基础上进一步对自编的MPC-Matlab代码进行了一定程度的延伸,主要是增加了定点跟踪功能,以及将每一步的预测状态量与控制量作图的功能。
一、模型准备及条件设置
仿真模型依然采用上一篇文章中的线性模型,但是取消了对状态量的约束(因为我不确定哪一种约束方式才是正常的,硬约束或者是间接约束),初始状态为 x 0 = [ − 1 ; 0 ] x_0=[-1;0] x0=[−1;0],跟踪值设为 x d = [ 5 ; 1 ] x_d=[5;1] xd=[5;1],目标函数的形式以及参数矩阵不变,预测步长为 N p = 5 N_p=5 Np=5。
实现误差反馈跟踪与上一篇的原理一样,主要区别就是将状态量与目标值作差,对误差值进行控制归零即可。
二、代码
clear; clc; close all;
% 线性系统系数矩阵
A=[1 1; 0 1]; B=[1; 0.5];
% 初始状态量-如果不能在下一步回到约束范围内,则会造成无解
x0=[-1; 0];
% 预测步长
Np=5;
% 优化目标参数,加权矩阵
Q=1*eye(2); R=1;
% 转化为用控制量ut表示的,关于状态量的推导方程的矩阵
At=[]; Bt=[]; temp=[];
% 转换后的加权矩阵
Qt=[]; Rt=[];
% 加权矩阵的计算过程,以及推导方程矩阵的叠加过程
for i=1:Np
At=[At; A^i];
Bt=[Bt zeros(size(Bt,1), size(B,2));
A^(i-1)*B temp];
temp=[A^(i-1)*B temp];
Qt=[Qt zeros(size(Qt,1),size(Q,1));
zeros(size(Q,1),size(Qt,1)) Q];
Rt=[Rt zeros(size(Rt,1),size(R,1));
zeros(size(R,1),size(Rt,1)) R];
end
% 参考输入
% xd=10*ones(1, 2*Np);
xd=[5;1];
% 控制量ut的上下限
lb=-1*ones(Np,1);
ub=1*ones(Np,1);
% 控制量ut的初始值
u0=zeros(Np,1);
% 转换后的优化目标函数矩阵,循环优化函数中H后的表达式为优化目标的另一项
H=2*(Bt'*Qt*Bt + Rt);
% 转换后的优化中的不等式约束左边系数矩阵,后面循环中的bi为不等式右边
% Ai=[Bt; -Bt];
% 声明u来保存每一步采用的控制量
u=[];
% 误差反馈
xe=x0-xd;
x=xe; %用来计算和保存误差状态量
xxe=xe; % 用来保存误差值
xx=x0; % 用来显示最后的真实状态量
figure();
for k=1:20
% 关于ut的不等式约束,实际上约束的是状态量,常数4就是状态量约束的上下边界
% bi=[5-At*xe; 5+At*xe];
% 一切准备就绪,进行二次优化
[ut, fval, exitflag]=quadprog(H,(2*xe'*At'*Qt*Bt)',[],[],[],[],lb,ub,u0);
% 显示求解结果是否正常
fprintf('%d\n', exitflag)
% xt = At*xk + Bt*ut;
%
% plot(xt');
% hold on;
xp=[]; %xp用来记录每个time step上对未来的预测状态量
xp_0=xe; %第一个值为当前状态量
xp=xp_0;
for j=1:Np
xp(:, j+1) = A*xp(:, j) + B*ut(j);
end
% 对每一次预测的状态量作图
tp=k:(k+Np);
tpu=k:(k+Np-1);
subplot(2, 1, 1);
plot(tp,xp','linewidth',1.5);
hold on;
subplot(2, 1, 2);
plot(tpu, ut, 'linewidth', 1.5);
hold on;
% 采用优化得到的控制量的第一个元素作为实际作用的控制量,代入到原系统中得到下一个时刻的状态量
u(k) = ut(1);
x(:, k+1) = A*x(:, k) + B*u(k);
xe = x(:, k+1);
xxe=[xxe, xe];
xx=[xx, xe+xd];
% 对优化初始值进行修改,采用预测值的后段作为下一步的初始值
u0 = [ut(2:Np); ut(Np)];
end
% 计算x状态值的绝对值之和,作为衡量控制效果的指标
count=sum(abs(xxe'))
figure();
subplot(2,1,1);
plot(xx','linewidth',1.5); grid on;
legend('x_1','x_2'); title('states');
subplot(2,1,2);
plot(u,'linewidth',1.5); grid on;
legend('u'); title('inputs');
以上就是全部代码,与前一篇相比差别不大,各位可以对照看看。
三、仿真结果分析
直接上图,首先是新增加的每一步预测图:
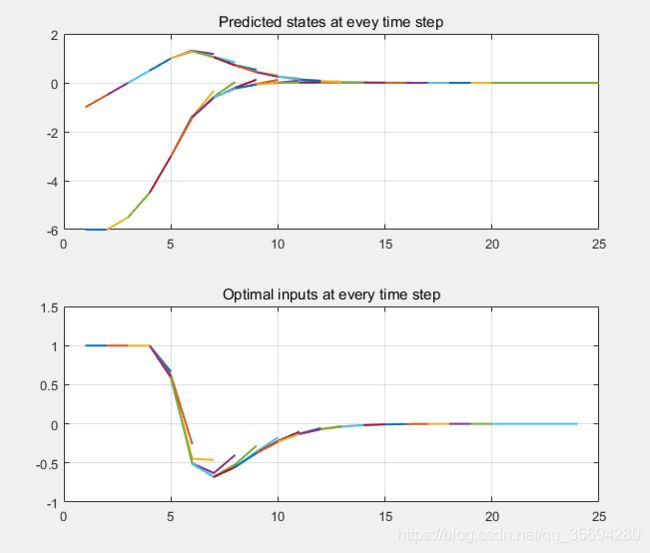
第一格为状态量,第二格为控制量。绘图的原理就是在每一步将MPC控制器所作出的预测(包括状态量与控制量)绘制下来,然后一个循环在此基础上继续重叠绘制。观察图形发现,MPC在每一个时间点做出的预测大致上与下一步的预测值重合,表明控制器做出的预测大致上符合实际状态量的走向。如果将预测步长 N p N_p Np设置的足够大,可以发现上图中所有的曲线都将完全重合。另外,这个图中绘制的是误差值,所以最后归零表示跟踪目标成功。
然后是实际的状态量与控制量:
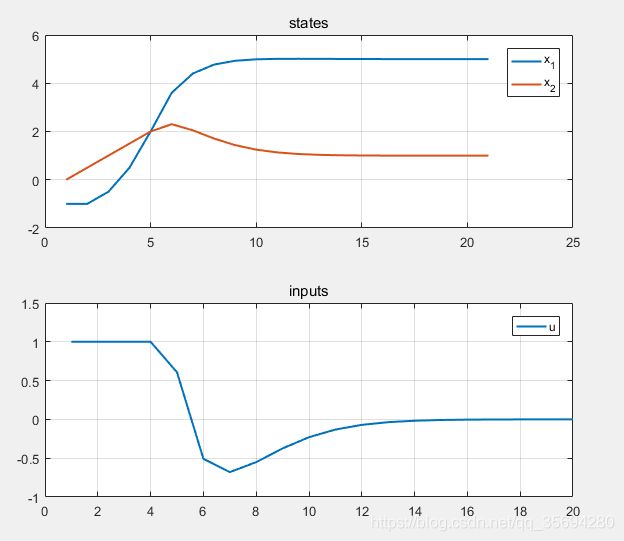
观察上图,与图1比较可以发现曲线的走势基本上相同,系统状态量也成功跟踪上了目标。到此为止就完成了定点跟踪的任务。至于轨迹跟踪或者变参考跟踪则需要进一步的修改与探索。同样的,如果大家感兴趣也可以在这个代码的基础上进行修改,比如将模型进行替换,更改预测步长,或者每一步采取预测控制量的前几位而不只是第一位等等。
如果有什么问题欢迎大家留言讨论。如果有朋友对MPC很感兴趣也欢迎私信深入讨论,共同学习进步。