深度学习---卷积神经网络(CNN)
文章目录
- 1. 什么是深度学习?
- 2. 深度学习框架
-
- 2.1 卷积神经网络(CNN)
-
- 2.1.1 引子 :边界检测
- 2.1.2 CNN的基本概念
- 2.1.3 CNN的结构组成
- 2.1.4 卷积神经网络 VS. 传统神经网络
1. 什么是深度学习?
深度学习(DL, Deep Learning)是机器学习(ML, Machine Learning)领域中一个新的研究方向,它被引入机器学习使其更接近于最初的目标–人工智能(AI, Artificial Intelligence)。
深度学习是学习样本数据的内在规律和表示层次,这些学习过程中获得的信息对诸如文字,图像和声音等数据的解释有很大的帮助。它的最终目标是让机器能够像人一样具有分析学习能力,能够识别文字、图像和声音等数据。 深度学习是一个复杂的机器学习算法,在语音和图像识别方面取得的效果,远远超过先前相关技术。
深度学习在搜索技术,数据挖掘,机器学习,机器翻译,自然语言处理,多媒体学习,语音,推荐和个性化技术,以及其他相关领域都取得了很多成果。深度学习使机器模仿视听和思考等人类的活动,解决了很多复杂的模式识别难题,使得人工智能相关技术取得了很大进步。
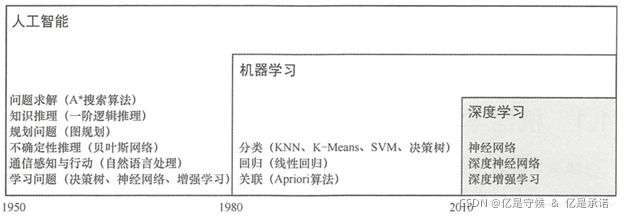
人工智能、机器学习和深度学习之间的关系
2. 深度学习框架
深度学习是一类模式分析方法的统称,就具体研究内容而言,主要涉及三类方法:
2.1 卷积神经网络(CNN)
基于卷积运算的神经网络系统,即卷积神经网络(CNN)。卷积神经网络和数学中的卷积不是同一个意思,以下来介绍什么是卷积神经网络。
2.1.1 引子 :边界检测
我们来看一个最简单的例子:“边界检测(edge detection)”,假设我们有这样的一张图片,大小8×8:

图片中的数字代表该位置的像素值,我们知道,像素值越大,颜色越亮,所以为了示意,我们把右边小像素的地方画成深色。图的中间两个颜色的分界线就是我们要检测的边界。
怎么检测这个边界呢?我们可以设计这样的一个 滤波器(filter,也称为kernel),大小3×3:

然后,我们用这个filter,往我们的图片上“盖”,覆盖一块跟filter一样大的区域之后,对应元素相乘,然后求和。计算一个区域之后,就向其他区域挪动,接着计算,直到把原图片的每一个角落都覆盖到了为止。这个过程就是 “卷积”。
(我们不用管卷积在数学上到底是指什么运算,我们只用知道在CNN中是怎么计算的。)
这里的“挪动”,就涉及到一个步长了,假如我们的步长是1,那么覆盖了一个地方之后,就挪一格,容易知道,总共可以覆盖6×6个不同的区域。
那么,我们将这6×6个区域的卷积结果,拼成一个矩阵:

这个图片,中间颜色浅,两边颜色深,这说明咱们的原图片中间的边界,在这里被反映出来了!
从上面这个例子中,我们发现,我们可以通过设计特定的filter,让它去跟图片做卷积,就可以识别出图片中的某些特征,比如边界。
上面的例子是检测竖直边界,我们也可以设计出检测水平边界的,只用把刚刚的filter旋转90°即可。对于其他的特征,理论上只要我们经过精细的设计,总是可以设计出合适的filter的。
我们的CNN(convolutional neural network),主要就是通过一个个的filter,不断地提取特征,从局部的特征到总体的特征,从而进行图像识别等等功能。
那么问题来了,我们怎么可能去设计这么多各种各样的filter呀?首先,我们都不一定清楚对于一大推图片,我们需要识别哪些特征,其次,就算知道了有哪些特征,想真的去设计出对应的filter,恐怕也并非易事,要知道,特征的数量可能是成千上万的。
其实学过神经网络之后,我们就知道,这些filter,根本就不用我们去设计,每个filter中的各个数字,不就是参数吗,我们可以通过大量的数据,来 让机器自己去“学习”这些参数嘛。这,就是CNN的原理。
2.1.2 CNN的基本概念
1.padding 填白
从上面的引子中,我们可以知道,原图像在经过filter卷积之后,变小了,从(8,8)变成了(6,6)。假设我们再卷一次,那大小就变成了(4,4)了。
这样有啥问题呢?
主要有两个问题:
- 每次卷积,图像都缩小,这样卷不了几次就没了;
- 相比于图片中间的点,图片边缘的点在卷积中被计算的次数很少。这样的话,边缘的信息就易于丢失。
为了解决这个问题,我们可以采用padding的方法。我们每次卷积前,先给图片周围都补一圈空白,让卷积之后图片跟原来一样大,同时,原来的边缘也被计算了更多次。

比如,我们把(8,8)的图片给补成(10,10),那么经过(3,3)的filter之后,就是(8,8),没有变。
我们把上面这种“让卷积之后的大小不变”的padding方式,称为 “Same”方式,
把不经过任何填白的,称为 “Valid”方式。这个是我们在使用一些框架的时候,需要设置的超参数。
2.stride 步长
前面我们所介绍的卷积,都是默认步长是1,但实际上,我们可以设置步长为其他的值。
比如,对于(8,8)的输入,我们用(3,3)的filter,
如果stride=1,则输出为(6,6);
如果stride=2,则输出为(3,3);(这里例子举得不大好,除不断就向下取整)
3.pooling 池化
这个pooling,是为了提取一定区域的主要特征,并减少参数数量,防止模型过拟合。
比如下面的MaxPooling,采用了一个2×2的窗口,并取stride=2:

除了MaxPooling,还有AveragePooling,顾名思义就是取那个区域的平均值。
4.对多通道(channels)图片的卷积(重要!)
这个需要单独提一下。彩色图像,一般都是RGB三个通道(channel)的,因此输入数据的维度一般有三个:(长,宽,通道)。
比如一个28×28的RGB图片,维度就是(28,28,3)。
前面的引子中,输入图片是2维的(8,8),filter是(3,3),输出也是2维的(6,6)。
如果输入图片是三维的呢(即增多了一个channels),比如是(8,8,3),这个时候,我们的filter的维度就要变成(3,3,3)了,它的 最后一维要跟输入的channel维度一致。
这个时候的卷积,是三个channel的所有元素对应相乘后求和,也就是之前是9个乘积的和,现在是27个乘积的和。因此,输出的维度并不会变化。还是(6,6)。
但是,一般情况下,我们会 使用多了filters同时卷积,比如,如果我们同时使用4个filter的话,那么 输出的维度则会变为(6,6,4)。
我特地画了下面这个图,来展示上面的过程:

图中的输入图像是(8,8,3),filter有4个,大小均为(3,3,3),得到的输出为(6,6,4)。
其实,如果套用我们前面学过的神经网络的符号来看待CNN的话,
- 我们的输入图片就是X,shape=(8,8,3);
- 4个filters其实就是第一层神金网络的参数W1,,shape=(3,3,3,4),这个4是指有4个filters;
- 我们的输出,就是Z1,shape=(6,6,4);
- 后面其实还应该有一个激活函数,比如relu,经过激活后,Z1变为A1,shape=(6,6,4);
所以,在前面的图中,我加一个激活函数,给对应的部分标上符号,就是这样的:

2.1.3 CNN的结构组成
上面我们已经知道了卷积(convolution)、池化(pooling)以及填白(padding)是怎么进行的,接下来我们就来看看CNN的整体结构,它包含了3种层(layer):
- Convolutional layer(卷积层—CONV)
由滤波器filters和激活函数构成。
一般要设置的超参数包括filters的数量、大小、步长,以及padding是“valid”还是“same”。当然,还包括选择什么激活函数。 - Pooling layer (池化层—POOL)
这里里面没有参数需要我们学习,因为这里里面的参数都是我们设置好了,要么是Maxpooling,要么是Averagepooling。
需要指定的超参数,包括是Max还是average,窗口大小以及步长。
通常,我们使用的比较多的是Maxpooling,而且一般取大小为(2,2)步长为2的filter,这样,经过pooling之后,输入的长宽都会缩小2倍,channels不变。 - Fully Connected layer(全连接层—FC)
这个前面没有讲,是因为这个就是我们最熟悉的家伙,就是我们之前学的神经网络中的那种最普通的层,就是一排神经元。因为这一层是每一个单元都和前一层的每一个单元相连接,所以称之为“全连接”。
这里要指定的超参数,无非就是神经元的数量,以及激活函数。
接下来,我们随便看一个CNN的模样,来获取对CNN的一些感性认识:

上面这个CNN是我随便拍脑门想的一个。它的结构可以用:
X→CONV(relu)→MAXPOOL→CONV(relu)→FC(relu)→FC(softmax)→Y
来表示。
这里需要说明的是,在经过数次卷积和池化之后,我们 最后会先将多维的数据进行“扁平化”,也就是把 (height,width,channel)的数据压缩成长度为 height × width × channel 的一维数组,然后再与 FC层连接,这之后就跟普通的神经网络无异了。
可以从图中看到,随着网络的深入,我们的图像(严格来说中间的那些不能叫图像了,但是为了方便,还是这样说吧)越来越小,但是channels却越来越大了。在图中的表示就是长方体面对我们的面积越来越小,但是长度却越来越长了。
2.1.4 卷积神经网络 VS. 传统神经网络
其实现在回过头来看,CNN跟我们之前学习的神经网络,也没有很大的差别。
传统的神经网络,其实就是多个FC层叠加起来。
CNN,无非就是把FC改成了CONV和POOL,就是把传统的由一个个神经元组成的layer,变成了由filters组成的layer。
那么,为什么要这样变?有什么好处?
具体说来有两点:
1.参数共享机制(parameters sharing)
我们对比一下传统神经网络的层和由filters构成的CONV层:
假设我们的图像是8×8大小,也就是64个像素,假设我们用一个有9个单元的全连接层:

那这一层我们需要多少个参数呢?需要 64×9 = 576个参数(先不考虑偏置项b)。因为每一个链接都需要一个权重w。
那我们看看 同样有9个单元的filter是怎么样的:

其实不用看就知道,有几个单元就几个参数,所以总共就9个参数!
因为,对于不同的区域,我们都共享同一个filter,因此就共享这同一组参数。
这也是有道理的,通过前面的讲解我们知道,filter是用来检测特征的,那一个特征一般情况下很可能在不止一个地方出现,比如“竖直边界”,就可能在一幅图中多出出现,那么 我们共享同一个filter不仅是合理的,而且是应该这么做的。
由此可见,参数共享机制,让我们的网络的参数数量大大地减少。这样,我们可以用较少的参数,训练出更加好的模型,典型的事半功倍,而且可以有效地 避免过拟合。
同样,由于filter的参数共享,即使图片进行了一定的平移操作,我们照样可以识别出特征,这叫做 “平移不变性”。因此,模型就更加稳健了。
2.连接的稀疏性(sparsity of connections)
由卷积的操作可知,输出图像中的任何一个单元,只跟输入图像的一部分有关系:

而传统神经网络中,由于都是全连接,所以输出的任何一个单元,都要受输入的所有的单元的影响。这样无形中会对图像的识别效果大打折扣。比较,每一个区域都有自己的专属特征,我们不希望它受到其他区域的影响。
正是由于上面这两大优势,使得CNN超越了传统的NN,开启了神经网络的新时代。