【vision transformer】DETR原理及代码详解(一)
DETR: End-to-End Object Detection with Transformers
论文: https://arxiv.org/pdf/2005.12872.pdf
代码: https://github.com/facebookresearch/detr (pytorch)
https://github.com/BR-IDL/PaddleViT/tree/develop/object_detection/DETR(PaddlePaddle)
1. DETR 概述
DETR 是vision transformer 中目标检测的开山之作,是 Facebook 团队于 2020 年提出的基于 Transformer 的端到端目标检测,克服了传统目标检测的anchore机制和非极大值抑制 NMS ,大大简化了目标检测的 pipeline。
相比faster rcnn等做法,detr最大特点是将目标检测问题转化为无序集合预测问题。faster rcnn设置一大堆anchor,然后基于anchor进行分类和回归其实属于代理做法。目标检测任务就是输出无序集合,而faster rcnn等算法通过各种操作,并结合复杂后处理最终才得到无序集合,而detr则相对直接。
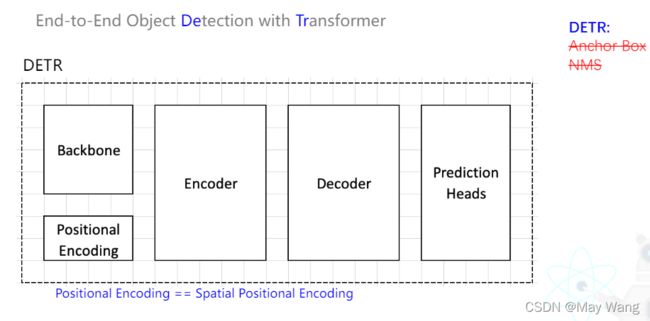
图1 DETR 的主要部件

图2 DETR流程
给定一张图片,经CNN backbone 提取深度feature,然后转为特征序列输入到transformer的encode-decode,结果直接输出指定长度为N的无序的预测集合,集合中每个元素包含预测物体的cls类别和bbox坐标。
CNN输出的结果是一个 H*W*C的tensor,代表了图片提取出的feature map。将feature map变成( H ∗ W ) ∗ C的二维矩阵放到transformer中。
模型输出的结果是固定的,也就是说最多检测一张图片中N个目标。其中N表示整个数据集中图片上最多物体的数目,因为整个训练和测试都Batch进行,如果不设置最大输出集合数,无法进行batch训练;如果图片中物体不够N个,那么就采用no object填充,表示该元素是背景。
set prediction
目标检测的新范式,输入一副图像,网络的输出就是最终的预测的集合,也不需要任何后处理能够直接得到预测的集合。对于每一个pred,找到对应的GT,然后每个(Pred,GT)求loss,再进行训练。
bipartite matching loss :
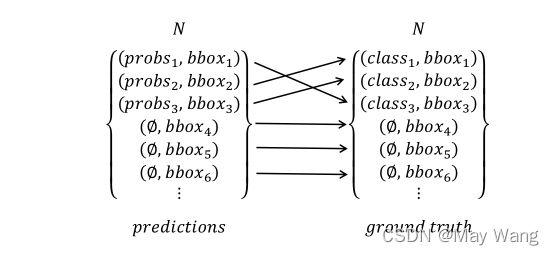
假设我们现在有两个sets,左边的sets是模型预测得到的N 个元素,每个元素里有一个bbox和对这个bbox预测的类别的概率分布,预测的类别可以是空,用ϕ 来表示;右边的sets是我们的ground truth,每个元素里有一个标签的类别和对应的bbox,如果标签的数量不足N 则用ϕ 来补充,,ϕ 可以认为是background。
两边sets的元素数量都是N ,所以我们是可以做一个配对的操作,让左边的元素都能找到右边的一个配对元素,每个左边元素找到的右边元素都是不同的,也就是一一对应。这样的组合可以有N ! 种,所有组合记作σ N 。这个N 即是模型可以预测的最大数量。
我们的目的是在这所有的N ! 种匹配中,找到使得![]() 最小的那个组合,记作
最小的那个组合,记作![]() 。
。
在分析loss计算前,需要先明确N个无序集合的target构建方式。detr输出是包括batchx100个无序集合,每个集合包括类别和坐标信息,其输出集合包括两个分支:分类分支shape=(b,100,92),bbox坐标分支shape=(b,100,4),对应的target也是包括分类target和bbox坐标target,如果不够100,则采用背景填充,计算loss时候bbox分支仅仅计算有物体位置,背景集合忽略。
问题:输出的bx100个检测结果是无序的,如何和gt bbox计算loss?
detr中利用匈牙利算法(双边匹配算法)先进行最优一对一匹配得到匹配索引,然后对bx100个结果进行重排就和gt bbox对应上,从而计算loss。
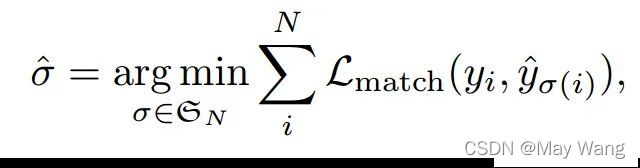
优化对象是σ,其是长度为N 的list,σ(i)=i,表示无序gt bbox 集合的哪个元素和输出预测集合中的第i个匹配。即寻找最优匹配,因为在最佳匹配情况下l_match和最小即loss最小。
该函数核心是需要输入A集合和B集合两两元素之间的连接权重,基于该重要性进行内部最优匹配,连接权重大的优先匹配。
2. DETR详细框架及流程
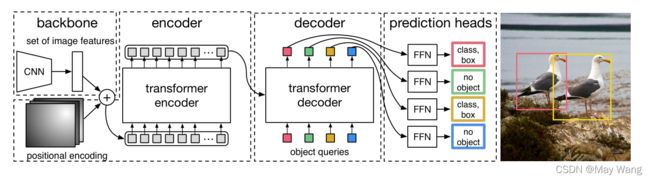
图3 DETR 整体框架
输入:
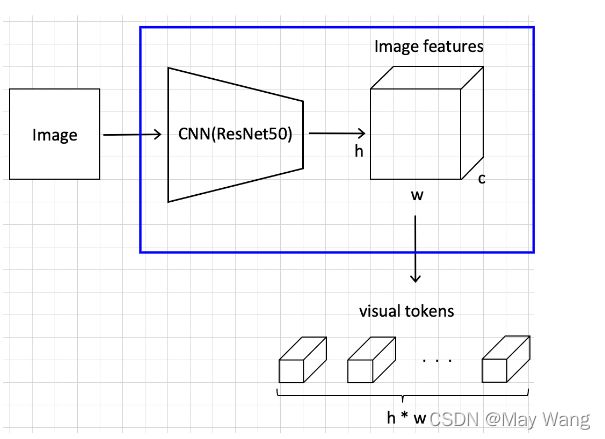
图5 DETR 的输入
图像经backbone后的feature,flatten或reshape 成visual tokens,此处的CNN相当于vision transformer中 的patch embedding。
Encode:
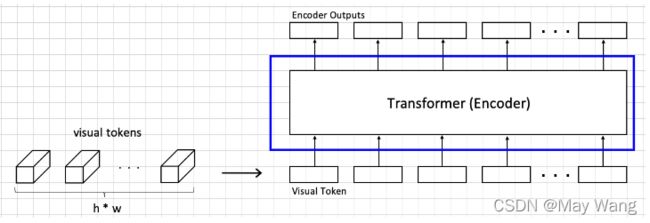
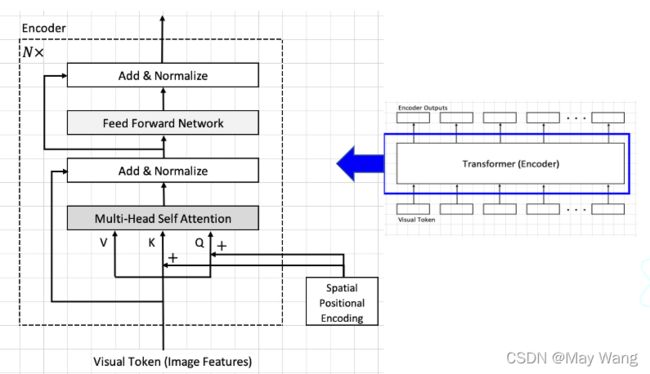
图6 DETR 的encode 部分
类似VIT 的多层encoder堆叠,输入Visual Token+ position embedding(其中v值没有加position embedding,而且spatial position encode 在每一次的encode 中都参与计算,为了不断强化patch 的位置),输出为与Visual Token维度一致的特征。
Decode:
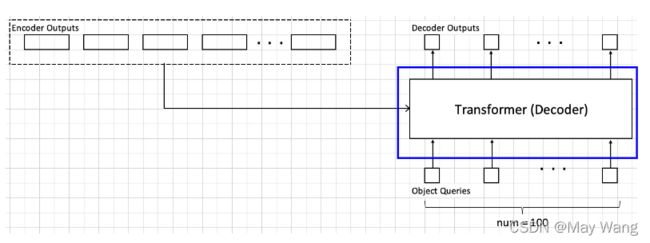
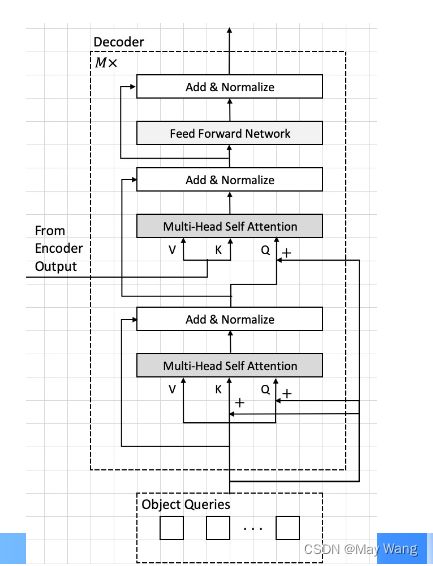
图6 DETR 的decode 部分
Decode 的目的是为了输出SeqtoSeq的方式,与encode的区别:输入除了encode output,还加入了object queries,类似于mask,重新定义一个可学习的参数或者embedding,不再用encode的输入visual token。处理过程加入了multi_head decode_encode attention,encode输出加入V,K,object queries 加入查询Q值。
object queries类似anchor(非几何上的),是可学习的特征向量。
Encode-decode:
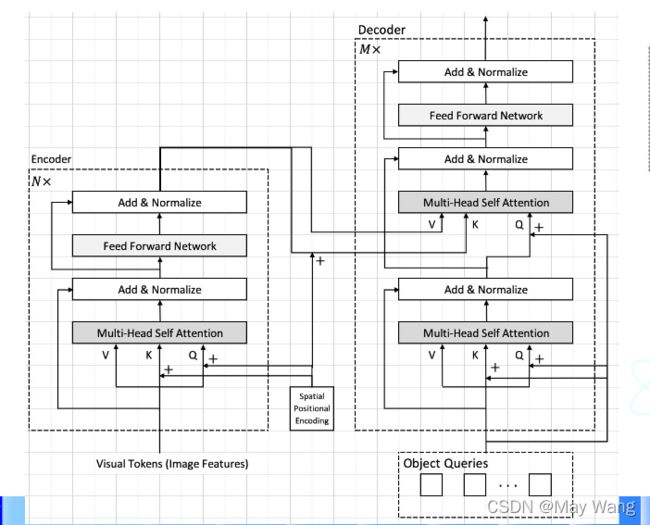
Decode 的注意力机制中加入了encode的输出。
DETR 的输出:
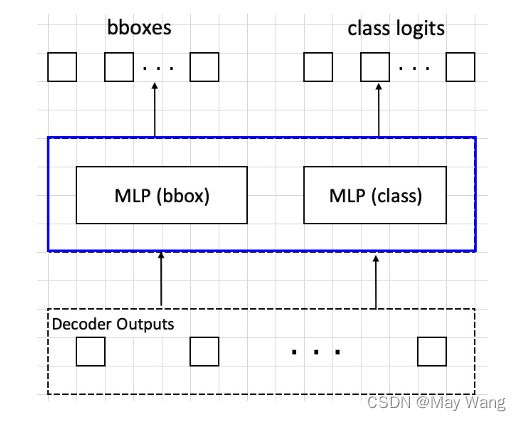
MLP即FC层,bbox四个坐标,output layer channel=4,output class = num_classes+1。
logist:(batch_size,num_queries,num_classes+1)
pred_boxes:(batch_size,num_queries,4)
DETR的整体流程:
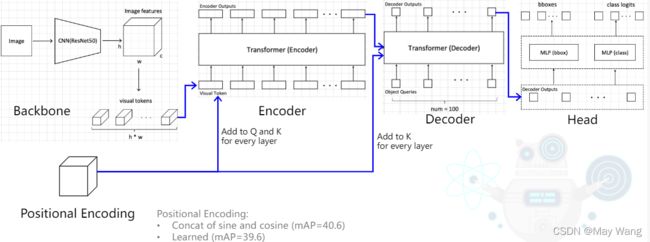
position encoding 可采用可学习的方式,也可采用人为设定的(sin or cos),其持续性的加入层运算。