线性代数和矩阵论 基础概念再理解
本文送给修过线性代数和矩阵论,但是考完试后全忘了的朋友。个人理解仅供参考,如果有误欢迎指正。
文章目录
- 行列式
- 矩阵是什么
- 矩阵乘法的计算习惯
- 酉矩阵,酉变换
- 各个变换中的不变
- 一些结论
- 投影变换
- 如何理解矩阵乘积的行列式等于行列式的乘积
- 为什么要定义对称矩阵
- 可逆意味着什么
-
- 可逆和方程解数的关系
- 为什么可逆和行列式有关
- 矩阵求逆
- 特征值,特征向量,特征分解
- 特征值和可逆的关系
- 对角矩阵
- 代数重数和几何重数
- Jordan矩阵,Jordan化
- 矩阵分解
- 为什么要提出SVD
- 满秩分解
- 向量空间,线性空间,零空间,列空间
- 线性算子乘积只缩小秩
- 秩,行秩,列秩
- 正交补子空间
- 线性变换
- 相似矩阵
- 特征子空间
- 秩与方程组的解
- 参考文献
行列式
第二种定义:
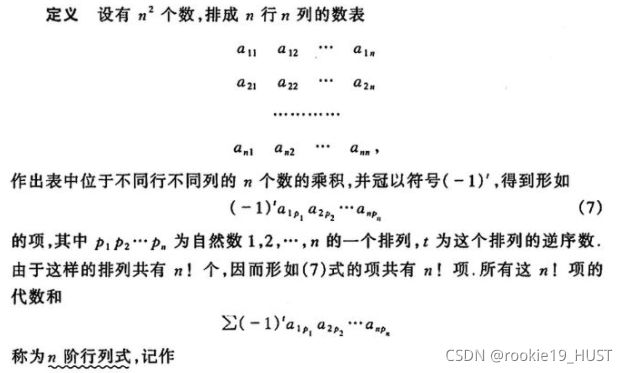
从第二种定义可以想到,任意行列都可以展开,故行列式转置后结果不变。行和列具有对等地位。
计算行列式时注意代数余子式和余子式的区别。
从第二种定义理解交换两行后变号:交换两行可以看成2(j-i)-1次相邻交换,因此逆序数的变化一定是奇数。
用途之一是,给出多元一次方程组的通解。个人认为行列式使得计算机能容易解决多元一次方程组。
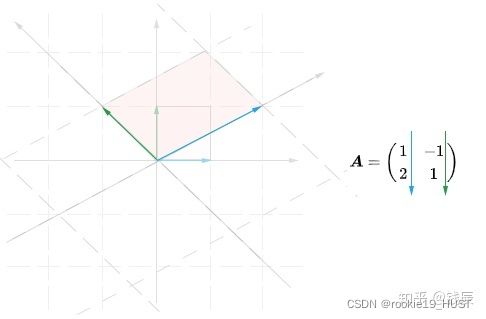
有人说矩阵是对非单位阵、经典坐标系(个人说法不严谨,就是指自然基那一套)空间的扭曲形变。行列式的英文是determinant,缩写为det,就是扭曲后的单位向量围成的空间的体积,可以衡量形变的程度。https://zhuanlan.zhihu.com/p/146551798。下图的矩阵的第一列感觉应该是(2,1),直观展示了“形变”的理解。
cramer法则,系数行列式不为0则有唯一解。n个未知数需要n个独立方程。
注意,行列式是方程数等于未知数数时的特例,也就是说行列式肯定是方的。从递归定义肯定也能推断出这一点。
一个结论是,行列式等于特征值的连积。
矩阵是什么
方程组系数视角:一开始是为了解决一般的多元一次方程组(方程数可以小于未知数的数)。
映射视角:m x n矩阵是线性变换,是函数。其输入是n维列向量,输出是m维列向量。
基视角:考虑Ax=b,A为矩阵,x和b是列向量,这个可以写成Ax=Ib,也就是说,同一个向量在不同的基下仍然是同一个东西,x是向量在基A下的坐标,b是向量在自然基下的坐标。
因此矩阵乘法就是映射的复合。矩阵乘法的结合律就是映射的结合律。
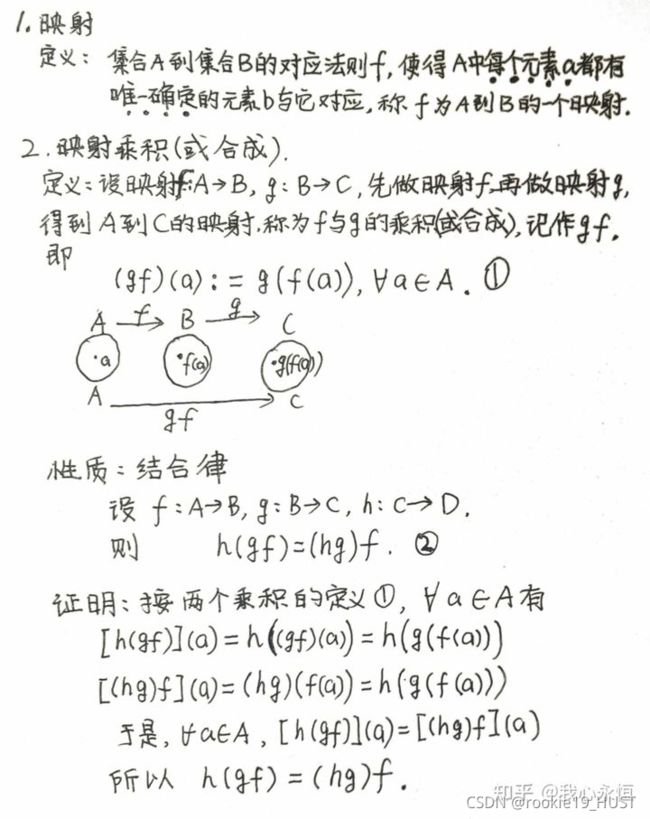
至于为什么写成gf,原因是f是先作用的,g是后作用的。gf(a)的意思就是g(f(a)),表示把f作用结果作为g的输入。
显然,映射不满足交换律,因为定义域和值域未必能对应上。
矩阵乘法的计算习惯
除了最开始学的点积写法,其实也有其它的理解,
行视角,将第一个矩阵看成行向量。


![]()
列视角,将第二个矩阵看成列向量。


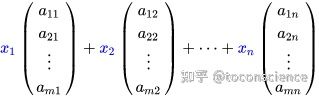
矩阵右乘一个列向量,相当于对矩阵的列进行线性组合;
矩阵左乘一个行向量,相当于对矩阵的行进行线性组合。
当我们说,矩阵A的列向量的线性组合,其实就是在说Ax,x是一个列向量。
酉矩阵,酉变换
酉变换是线性变换。
酉矩阵的行列式为±1。
一个没用的解释是,酉变换就是乘一个酉矩阵,酉矩阵就是满足AA^H=A^HA=I的矩阵。
更本质的解释是,酉变换不改变向量的长度,不改变复空间中向量的内积(据此可推出酉矩阵特征值的模长为1)。想想量子逻辑门,酉变换不影响概率归一性,可以辅助记忆。
不改变长度,可以视为旋转变换。可以通过公式求出旋转轴和旋转角。以过原点平面为镜面的变换,其矩阵为I-2uu^T(与投影变换的很像,走一步是投影,走两步就是镜像了)
各个变换中的不变
初等行变换就是方程组消元,不会改变独立方程的个数,因此不会改变秩。
相似变换就是同一个线性变换的易容术,不会改变特征值。
一些结论
如果矩阵不可逆,说明对应行列式为0,特征值的积为0,那至少有一个零特征值。
如果矩阵特征值全为0,则其幂零。反之亦然。
矩阵幂零,则其Jordan标准型幂零,每一个Jordan块也幂零,则其特征值全为0。
A和AAT的零空间相等,故像空间的维数相等,结合R(AAT)包含于R(A),可知R(AAT)=R(A)。
投影变换
向量到平面的投影Pα = α-(u,α)u,可以从此式看出,P对应的矩阵为I-uu^T。
如何理解矩阵乘积的行列式等于行列式的乘积
为什么 |AB|=|A||B| ,这意味着什么。这个问题我还是没想明白,先当结论记吧。
为什么要定义对称矩阵
有人认为原因是对称矩阵有很好的性质。
实对称矩阵一定可以对角化。
实对称矩阵一定有标准正交的特征向量。
可逆意味着什么
可逆=满秩=非奇异
可逆和方程解数的关系
可逆,意味着它是单射,所以Ax=b有唯一解。
为什么可逆和行列式有关
行列式不为0是可逆的充要条件 。
可逆, |AA^-1|=|A||A^-1|=|i|=1,因此行列式不为0
行列式不为0,就能用伴随矩阵数乘1/|A|来构造出逆矩阵。
我个人感觉,可逆这个概念是从映射和变换角度来看待矩阵的,而行列式和有解/满秩是从方程组的角度来看待矩阵的。所以没有特别直观的解释。
矩阵求逆
矩阵求逆可以看成解了一个线性方程组,可以用来衡量计算量。
特征值,特征向量,特征分解
几何意义,将矩阵视为变换,则特征向量只会被矩阵拉伸,而不会被旋转。
特征值到底体现了矩阵的什么特征?为啥叫特征值?
秩等于特征向量个数,把所有的特征向量排出来,

![]()
![]()
V里的就是特征向量,Λ里的的就是特征值。
这也就意味着,找出所有的特征值和特征向量,就能还原出原来的矩阵。所以称之为“特征”也算合理。特征分解也叫谱分解,n阶方阵A的n个特征值称为A的谱。
此外,还有主特征值之说。https://zhuanlan.zhihu.com/p/314464267
矩阵反复作用于任意向量,结果会逐渐接近最大特征值对应的特征向量。
最大特征值就是主特征值。图像处理时,用图像最大的几个特征值就能大致复原原图。
也就是说,主特征值代表了矩阵的某种内在特征,代表了矩阵作为变换的主要方向。
对角化的充要条件之一是n个线性无关的特征向量(可以不必有n个不同的特征值,证明用基),此外矩阵论还讲了好几个。如果不能对角化,那就退求其次Jordan化。
能对角化的时候,我们发现矩阵按列分块后形成的列向量恰好满足特征向量的定义。所以对角化和特征向量联系紧密。
特征值的和等于矩阵的迹,特征值的积等于矩阵的行列式。
特征值和可逆的关系
将矩阵看成映射。
特征值中如果有0,说明有一部分非零向量会被映射到0,故这个矩阵肯定不可逆。
对角矩阵
考虑到特征分解,对角矩阵可以分解为单位矩阵和它自己,所以对角矩阵的对角线就是其特征值。
代数重数和几何重数
图源自知乎@123。
代数重数和几何重数是对于单个特征值而言的。

Jordan矩阵,Jordan化
仔细观察Jordan矩阵,发现包含特征值、代数重数、几何重数三个信息。
每个特征值对应一个Jordan矩阵,其线性无关特征向量的个数即为Jordan矩阵中Jordan块的个数,也就是几何重数。
对每个线性无关的特征向量,解Jordan链,确认Jordan链的长度,就能得到Jordan矩阵中的每个Jordan块的尺寸(知道尺寸也就知道了Jordan块)。于是就得到了Jordan标准型。
至于P,Jordan链就是P矩阵。为什么呢,注意到我们对P做了两次按列分块,第一次是有几个特征值就分成几块,第二次是在第一次分出来的块上再分,特征值有几个线性无关特征向量就分几块。每解一条Jordan链,就能得到第二次的一块。
矩阵分解
https://zhuanlan.zhihu.com/p/183065884
矩阵分解的用途非常广泛,比较常用的有奇异值分解 (Singular Value Decomposition 以下简称 SVD分解),Schur分解,特征值分解(对于可对角化矩阵而言),Jordan分解(对于不可对角化矩阵而言)等等。矩阵分解的目的很明确,一方面是为了“打开”矩阵,使得矩阵的信息更加一目了然,比如将一个矩阵进行SVD分解后我们就能知道了矩阵的秩,范数(2-范数,F-范数等等)和矩阵条件数等等;另一方面是为了方便对矩阵进行计算,比如解线性方程组,线性最小二乘问题等等。
三角分解(如LU和LDV分解)和满秩分解都可以通过行变换求得。
极分解将一个变换分成旋转变换和拉伸变换两个部分,先求出奇异值分解之后易得极分解。
为什么要提出SVD
一个矩阵,若为n阶方阵,并且有n个线性无关的特征向量,那么它可以对角化,或者说特征分解。
任何矩阵都可以相似于Jordan矩阵。但可惜Jordan次对角线0、1不确定。
正规矩阵 等价于 矩阵可酉相似对角化。
SVD可以看成是,任意尺寸矩阵,的一种广义特征分解。通过构造AHA这个正规矩阵来做到,逻辑大概如下:
任何矩阵A都有共轭转置AH。所以每个矩阵A都对应一个AHA。
因此,任何矩阵A都对应一个能够酉相似对角化的矩阵。
于是任何矩阵A都对应一个对角矩阵。
满秩分解
满秩分解有助于计算广义加号逆,也称MP逆。
A=BC,A是m x n矩阵,秩为r。B是m x r矩阵,秩为r。C是r x n矩阵,秩为r。
则其MP逆可以由公式求得:CH(CCH)-1(BHB)-1B。
满秩分解只用初等行变换就能完成,手法比较简单。
向量空间,线性空间,零空间,列空间
向量空间,如R3。空间由集合和运算定义,有点像代数系统。集合中的元素,加法和乘法后仍在空间中。R3的子空间如任意一个过零点的平面。向量空间中肯定有零向量。
矩阵可以看成一系列向量,也就是向量集合。再加上矩阵加法和矩阵数乘就成为空间了。
穷尽列向量的线性组合后形成的空间,就是列空间。
零空间虽然经常跟列空间一起谈,但其实其组成内容完全不一样。列空间是矩阵A中的列张成的,而零空间是使Ax=0的x组成的。一个源于A,一个源于x。
列空间是使Ax=b的有解的那些b,零空间是Ax=0的解空间。
列空间和像空间是同一个东西的两种看待方式。
线性算子乘积只缩小秩
由线性性易证,零向量总是映射到零向量。
零总是映射到零。非零可能映射到零,也可能映射到非零。所以对一个空间使用线性算子,秩(像空间维数)只会缩小。
秩,行秩,列秩
从方程组系数角度来看,秩是独立方程的个数。
行秩是行向量线性无关组的大小,列秩是列向量线性无关组的大小。秩是列空间的维数。
直觉上,维度丢失,是因为被映射到0了。所以线性代数基本定理是,列空间维数 r ,零空间维数n-r。
关于行秩=列秩=秩,我看见、想到两种解释,感觉都能说得通。
第一种,设A为m x n的矩阵,A=BD,B为m x c,D为c x n,c为列秩。由于乘积只可能缩小乘数的秩,所以r≤m,r≤c。
同理,A=PQ,P为m x r,Q为r x n,r为行秩,则c≤r,c≤n。可见r=c。
第二种,设A=BD,将D看成列向量(即把A和D的每一行包装为一个整体)。B是m x c行,D是c x 1行,A是m x 1行。
则A的每一行是D每一行的线性组合。因此A的行空间维数不会超过D的行数,故r≤c。
对A的转置进行类似的推导,可以得到c≤r。所以r=c。
正交补子空间
设U是内积空间的子空间,设U(右上角⊥)是其正交补子空间。
这个术语应该分成三部分,正交,补,子空间。
定义式中只要求正交,即U(右上角⊥)中的每一个向量,都跟U中所有向量内积为0。
可以证明这个定义下,U(右上角⊥)是一个子空间,而且与U互补(与U直和之后即为内积空间)。
线性变换
变换是指集合到自己的映射。
原来共线的三点,线性变换后仍然共线。
线性变换是自同态。未必同构,故未必可逆。
随着基的改变,同一个线性变换就有不同的矩阵,这些矩阵是相似的。
用Jordan化方法找到线性变换对应的最简单的矩阵。
相似矩阵
相似的意义是,他们是同一个线性变换在不同基下的面貌。他们的特征值相同,特征向量不同。
设A是线性变换T在基(α1, α2, … αn)下的矩阵,A的特征向量为X。则X是线性变换的特征向量ξ在基下的坐标。

相似矩阵可以化为一样的Jordan标准型,因此相似矩阵的最小多项式相同。这也侧面反映了Jordan标准型的好处,可以一眼看出其最小多项式。有了Jordan标准型,可以利用最小多项式降次,可以利用形似泰勒展开的上三角矩阵计算每一个Jordan块经过多项式运算后的结果。
特征子空间
同一个特征值,对应的线性无关的特征向量,张成的空间。
秩与方程组的解
靠背的话容易记混,特别是齐次和非齐次分开记的时候。围绕增广矩阵的秩,统一的理解如下。
增广前的秩如果小于增广后的秩,说明会有这样的方程:0乘x1 + 0乘x2 = b,b不为0。这样就无解。
增广前后的秩如果相等,则有解。如果秩小于未知数个数(也就是列数),说明独立方程数量不够,有无穷多解。
如果秩等于列数,那就有唯一解。
拓展,单侧逆也可以在这里说。对于AX=b,
如果A列满秩,则A有左逆,X有唯一解,为A左逆乘b。
如果A行满秩,则A有右逆,X有解,如A右逆乘b。
参考文献
关于矩阵乘法结合律,使用了知乎@我心永恒的图。
还使用了知乎@toconscience的图。还有一些来源于网络。