论文笔记ResNet:Deep Residual Learning for Image Recognition
Deep Residual Learning for Image Recognition
文章目录
- Deep Residual Learning for Image Recognition
-
- 0 摘要
- 1 引言
- 2 相关工作
- 3 深度残差学习
-
- 3.1 残差学习
- *3.2 通过捷径连接实现恒等映射
- *3.3 网络架构
-
- 普通网络(34层为例)
- 残差网络(34层,2层残差块)
- 3.4 实现细节
- 4 实验
-
- 4.1 ImageNet分类任务
-
- 普通网络
- *残差网络
- *捷径连接
- *深度瓶颈架构(3层残差块)
- ResNet50
- ResNet101、ResNet152
- 4.2 CIFAR-10分析
-
- 层响应分析
- 1000层探索
- 4.3 目标检测任务
- 5 关键代码
0 摘要
- 提出了残差学习框架,简化深度网络训练
- 显示定义与输入有关的残差函数,重新配置层
- 残差网络更易优化,随深度增加获得精确度
- ImageNet上的152层深度残差网络比VGG深8倍,但是复杂性更低
- 效果很好,ILSVRC-2015冠军
1 引言
背景/问题提出
深度网络融合浅层/中层/高层提取到的特征进行分类,而且是以端到端训练的方式,特征等级随网络叠加变得丰富。
网络深度至关重要。
“学习一个更好的网络是否和堆叠更多的层一样容易?”,过深的网络会有以下问题:
-
梯度消失(弥散)/梯度爆炸问题:初始化正则化、中间层正则化策略来解决。
-
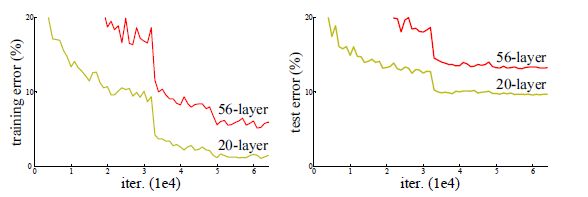
退化问题(正确率饱和后急剧下降,不是过拟合引起的):层更多(简单的堆叠),训练误差反而更高
从 浅层模型 构造 深层模型 的方案:添加层时恒等映射,其他层直接拷贝。
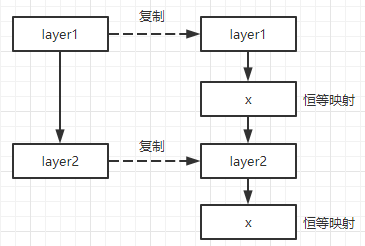
这种构造深层模型方法训练误差不比浅层大(增加的层起到的作用是恒等映射),但是也不能找到等优或更优解(或者不能在规定时间内找到)。拟合一个恒等映射代价大效果差
深度残差网络,期望几个堆叠层拟合一个残差函数 F F F,而不是原本存在的函数 H H H
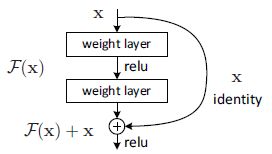
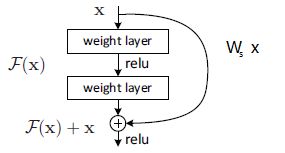
假设映射函数 H ( x ) H(x) H(x)是我们最终期望的获得的,堆叠的非线性层去拟合 F ( x ) = H ( x ) − x F(x)=H(x)-x F(x)=H(x)−x,那么原映射函数变成 H ( x ) = F ( x ) + x H(x)=F(x)+x H(x)=F(x)+x。假设优化残差映射 F ( x ) F(x) F(x)比优化原始映射 H ( x ) H(x) H(x)要容易
F ( x ) + x F(x)+x F(x)+x可以通过在前向网络捷径连接实现,残差块如下图:
捷径可以跨一层,也可以跨多层;可以是恒等映射,也可以是投影映射,恒等映射既没有引入额外参数,又没有增加计算复杂度
实验说明/贡献
ImageNet上验证
- 深度残差网络容易优化,但当深度增加时,对应的“普通”网络(简单堆叠层)显示出更高的训练误差,深度残差网络却不会
- 深度残差网络可以通过增加深度提升精度,产生更好结果
CIFAR-10、ILSVRC、COCO等若干数据集和比赛效果都不错,模型不限定在特定的数据集上
2 相关工作
-
残差表示:VLAD、Fisher Vector编码残差向量(两者都是用于图像检索和分类的强大浅层表示)。求解偏微分方程,用分层预处理(依赖于表示两个标度之间的残差矢量的变量)替代多重网格法,收敛速度更快。
-
捷径连接:通过捷径连接实现中间层响应,梯度和传播误差的方法;“起始”层由捷径分支和更深的分支组成;带有门函数的
highway network(门与数据相关且有参数)。
3 深度残差学习
3.1 残差学习
令 H ( x ) H(x) H(x)表示为堆叠层拟合表示的映射, x x x表示第一层的输入。假设多非线性层可以逼近相近的复杂函数,它们就能渐近逼近残差函数 H ( x ) − x H(x)-x H(x)−x,令 F ( x ) = H ( x ) − x F(x)=H(x)-x F(x)=H(x)−x,那么 H ( x ) = F ( x ) + x H(x)=F(x) + x H(x)=F(x)+x。尽管两种形式都应能渐近地逼近所需的函数,但学习的难易程度可能有所不同。
- 多个非线性层拟合 F ( x ) F(x) F(x),残差映射
- x x x是恒等映射
添加的层如果是拟合恒等映射,那么较深的模型的训练集错误率不会比较浅模型高。但是用多个非线性层去拟合恒等变换更加困难。(举例,如果恒等映射是最优的,那么残差函数接近零就能实现,好于用非线性层拟合一个简单的恒等映射)
*3.2 通过捷径连接实现恒等映射
恒等映射, x x x和 F ( x ) F(x) F(x)维数相等时
y = F ( x , { W i } ) + x y=F(x,\{W_i\})+x y=F(x,{Wi})+x
-
x , y x,y x,y分别是输入向量和输出向量
-
F ( x , { W i } ) F(x,\{W_i\}) F(x,{Wi})表示要学习的残差映射,如下图
-
这样的形式,没有引入额外参数或计算复杂性。
非恒等映射, x x x和 F ( x ) F(x) F(x)维数不相等时
y = F ( x , { W i } ) + W s x y=F(x,\{W_i\})+W_sx y=F(x,{Wi})+Wsx
-
W s W_s Ws是一个线性变换(维数相同情况下,可以认为 W s W_s Ws是方阵),用于更改通道数,仅用于匹配尺寸。1x1卷积
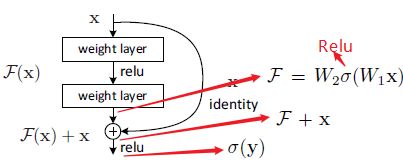
残差函数 F F F说明
- F F F形式灵活,两层/三层是最好的结果,更多的层也是可以的,一层的就是线性变换了,没有什么用
- 尽管为简化起见,上述符号是关于全连接层的,但它们也适用于卷积层。 函数 F ( x , { W i } ) F(x,\{W_i\}) F(x,{Wi})可以表示多个卷积层。 在两个功能图上逐个通道执行逐元素加法。
*3.3 网络架构
用于ImageNet的两个模型:
普通网络(34层为例)
baselines
- 3x3卷积
- 对于输出特征维度相同的层,过滤器数目相同
- 当特征映射尺寸减半时,过滤器数目加倍,以保持每层的时间复杂度
- 步长为2的卷积层实现下采样
- 全局平均池化和1000路全连接和softmax层结尾
残差网络(34层,2层残差块)
在上述普通网络的基础上,插入捷径连接,形成相应的残差网络
-
当输入和输出的尺寸相同时,使用恒等映射
-
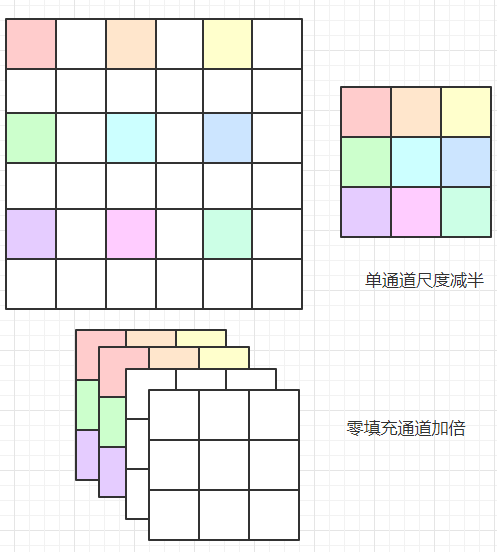
当维度增加时(特征通道数变多,单个通道的尺寸减半),有两种选择:
-
仍然是恒等映射,用零填充(步长为2)增加的维度
-
投影映射用于匹配尺寸:按步长为2的1x1的卷积完成通道数目的增加
-
3.4 实现细节
- 尺寸放缩到[256,480]、图像裁剪、水平翻转、减像素均值、标准颜色增强
- 批归一化
- SGD,mini-batch_size=256,学习率0.1(稳定时除以10),迭代次数:60x104,weight decay=0.0001,momentum=0.9
- 没有使用dropout
- 测试时,五个(左上、右上、左下、右下、中间)、多尺度平均
4 实验
4.1 ImageNet分类任务
普通网络
34层比18层训练集上错误率反而上升了,发生了退化现象,由于BN,不可能是梯度消失引起的。
推测,深层普通网络的收敛速度可能呈指数级降低,这会影响训练误差的降低(未来研究)
*残差网络
基线架构与上述普通网络相同,除了添加了捷径连接实现相应的残差网络。
网络配置
-
捷径连接都使用恒等映射
-
对增加的维度使用零填充
所以没有额外的参数
观察到的结论:纵向比较,没有退化;横向比较,误差降低;时间比较,收敛更快。
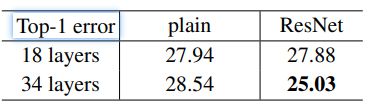
- 网络没有发生退化,34层ResNet优于18层ResNet。 更重要的是,34层ResNet表现出低得多的训练误差,并且可以推广到验证数据。 这表明在这种情况下可以很好地解决退化问题,并且我们设法从增加的深度中获得准确性的提高。
- 与普通网络相比,Res34降低了训练误差。 这项比较验证了残差学习在极深系统上的有效性。
- 18层普通网络比Res18残差网络比较准确,但18层ResNet收敛更快(我感觉差不太多)。 当网“不是太深”时,当前的SGD解算器仍然能够为纯网找到良好的解决方案。 在这种情况下,ResNet通过在早期提供更快的收敛来简化优化。
*捷径连接
捷径连接方案选择,以下三种方案:
- 增加的维度用零填充,所有捷径连接都是恒等映射
- 投影捷径用于增加尺寸,其他都是恒等映射
- 所有连接都是投影捷径
性能上:3 > 2 > 1,但是都差不多。作者用的是第二种。捷径连接方式的不同对解决退化问题并非至关重要。
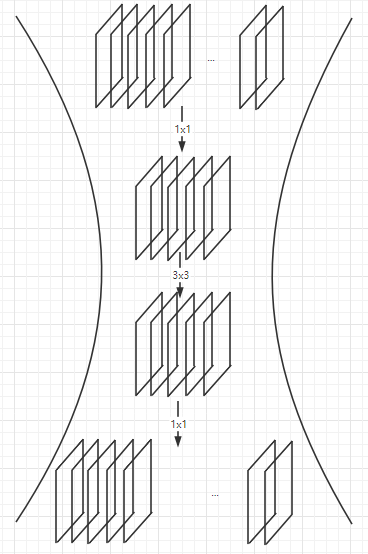
*深度瓶颈架构(3层残差块)
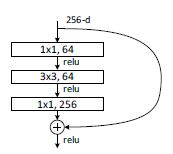
对于每个残差函数 F F F,使用3层堆叠。 其中1x1卷积层负责改变通道数(先变小,再变大)不改变尺寸,3x3卷积层更改尺寸。3x3层通道数少,1x1多,所以称为瓶颈。
无参数恒等连接对于瓶颈结构特别重要。 如果将图中的恒等映射替换为投影,则时间复杂度和模型大小增加了一倍。 因此,恒等映射方式可以为瓶颈设计提供更有效的模型。
较浅网络用2层,较深网络用3层
ResNet50
34层基础上,3层瓶颈结构,方案2。
ResNet101、ResNet152
使用更多的3层模块来构建101层和152层ResNet。
尽管深度显着增加,但152层ResNet的复杂度仍低于VGG-16/19网络。
50/101/152层ResNet比34层ResNet准确度高得多。
4.2 CIFAR-10分析
关注点是极端深度网络的行为而不是针对结果,所以使用简单的网络。
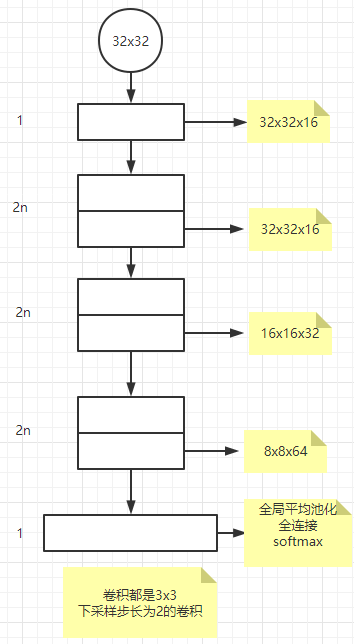
都使用恒等映射、零填充方案。
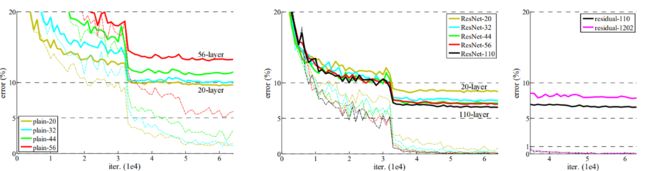
- 普通网络:随深度增加,训练/测试错误率上升
- 残差网络:克服了退化现象
- ResNet110:学习率先是0.01来warm up,当训练错误率低于80%时,学习率变成0.1继续训练
层响应分析
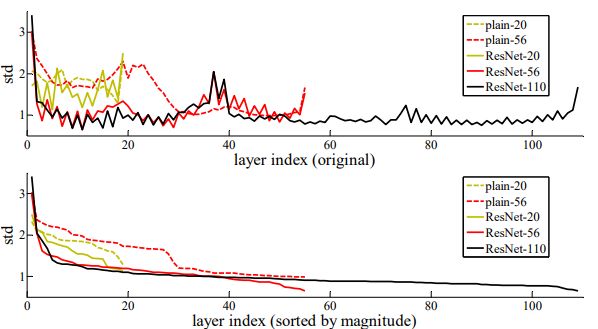
不是很懂这张图含义与意义
- 层响应的标准差,这些响应是BN之后、其他非线性(ReLU /加法)之前每个3x3层的输出的。对于ResNets,分析这些标准差揭示了残差函数的响应强度。
- ResNet的响应通常比普通响应小,说明与非残差函数相比,残差函数通常可能更接近于零。(我觉得只能说明输出更稳定,不能说明趋向于某个值)
- 更深的ResNet具有较小的响应幅度。当有更多层时,ResNets的单个层往往对信号的修改较少。对于更深的层,更可能拟合的是恒等映射,残差函数趋近于0
1000层探索
将n设置为200,形成1202层网络。 结果显示:没有优化困难,该千层网络能够实现训练误差小于0.1%。 其测试误差仍然相当不错。
但是,仍然存在未解决的问题。 尽管1202层网络和110层网络的训练误差相似,但其测试结果却比110层网络的测试结果差。 作者认为这是由于过拟合。 对于该数据集,1202层网络可能会不必要地大。 应用强正则化(例如maxout 或dropout )以在此数据集上获得最佳结果。 我们不使用maxout / dropout,而只是通过设计通过深度和精简架构强加正则化,而不是将关注点分散到优化困难上。但是,结合更强的正则化可能会改善结果,我们将在以后进行研究。也不能无限叠加网络层。
4.3 目标检测任务
在其他识别任务上泛化性能良好。
基线:PASCAL VOC 2007和2012和COCO。 采用Faster R-CNN作为检测方法。对用ResNet-101替换VGG-16,因为检测实现方式相同,因此收益只能归因于更好的网络。
最值得注意的是,在具有挑战性的COCO数据集上,COCO标准指标(mAP)提高了6.0%,相对提高了28%。 该收益完全归因于所学的表示。
基于深层残差网络,ILSVRC和COCO 2015竞赛的多个赛道上均获得了第一名:ImageNet检测,ImageNet本地化,COCO检测和COCO分割。
5 关键代码
自己仿照Pytorch官方实现写的
class Block(nn.Module): # 跨三层结构
def __init__(self, input_channel, middle_channel, output_channel, stride=1, down_sample=None):
super(Block, self).__init__()
self.conv1 = nn.Sequential(
nn.Conv2d(input_channel, middle_channel, kernel_size=1),
nn.BatchNorm2d(middle_channel),
nn.ReLU(inplace=True)
)
self.conv2 = nn.Sequential(
nn.Conv2d(middle_channel, middle_channel, kernel_size=3, stride=stride, padding=1),
nn.BatchNorm2d(middle_channel),
nn.ReLU(inplace=True)
)
self.conv3 = nn.Sequential(
nn.Conv2d(middle_channel, output_channel, kernel_size=1),
nn.BatchNorm2d(output_channel),
)
self.down_sample = down_sample
def forward(self, x):
identity = x
x = self.conv1(x)
x = self.conv2(x)
x = self.conv3(x)
if self.down_sample:
identity = self.down_sample(identity)
out = identity + x
out = F.relu(out, inplace=True)
return out
class ResNet50(nn.Module):
def __init__(self, num_class):
super(ResNet50, self).__init__()
self.feature = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
)
def make_layer(input_channel, middle_channel, output_channel, stride, number):
down_sample = nn.Sequential(
nn.Conv2d(input_channel, output_channel, 1, stride),
nn.BatchNorm2d(output_channel)
)
layers = [Block(input_channel, middle_channel, output_channel, stride, down_sample)]
layers.extend([Block(output_channel, middle_channel, output_channel)] for _ in range(1, num_class))
return nn.Sequential(*layers)
self.layer1 = make_layer(64, 64, 256, stride=1, number=3)
self.layer2 = make_layer(256, 128, 512, stride=2, number=4)
self.layer3 = make_layer(512, 256, 1024, stride=2, number=6)
self.layer4 = make_layer(1024, 512, 2048, stride=2, number=3)
self.avg_pool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(2048, num_class)
def forward(self, x):
x = self.feature(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avg_pool(x)
x = x.reshape(x.size(0), -1)
x = self.fc(x)
return x