强化学习:(四)Q-learning, DQN, DDQN是什么?
目录
- 一、Q-learning
- 二、Deep Q Networks
- 三、double Q-learning
- 参考资料
一、Q-learning
强化学习的一个episode:
强化学习的最终目标:当我处于 s t s_t st状态,我应该采取从长远来看最好的动作 a t a_t at
如何实现这个目标?如果 s t s_t st状态下,每个可选动作的评分是已知的,我只需要选最高分的动作;但实际上评分是未知的,我需要对它进行估计。
动作评分的定义
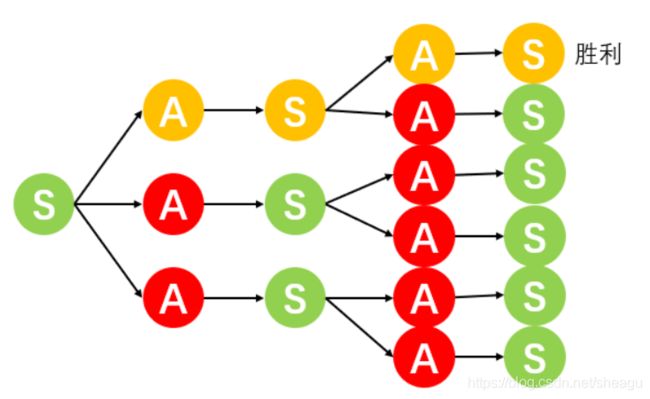
从动态规划的角度来看,如果某个动作可以导向胜利的状态,那么这个动作就得分最高;如果某个动作虽然不能直接胜利,但可以间接导向最容易取胜的状态,那么这个动作就是当前可选动作中得分最高的。如图,橙色的通道是最优通道。
因此,评估一个动作的好坏要看他的长远利益。如何衡量长远的利益?对于每个 ( s t , a t ) (s_t,a_t) (st,at)组合,都给出一个奖励 r t r_t rt,那么某个 ( s t , a t ) (s_t,a_t) (st,at)组合的回报定义为:
U t = r t + γ r t + 1 + γ 2 r t + 2 + . . . = ∑ i = t ∞ γ i − t r i ( 1 ) U_t=r_t+\gamma r_{t+1}+\gamma^2 r_{t+2}+...=\sum_{i=t}^\infty\gamma^{i-t}r_i\ \ \ (1) Ut=rt+γrt+1+γ2rt+2+...=i=t∑∞γi−tri (1)
考虑不确定性:每个 ( s t , a t ) (s_t,a_t) (st,at)和下一个 s t s_t st之间有一个转移概率矩阵,并不是一一对应的,所以,对 a t a_t at的价值衡量不能直接用 U t U_t Ut,要对它求期望。动作价值函数定义为:
Q π ( s t , a t ) = E [ U t ∣ s t , a t , π ] = E [ ∑ i = t ∞ γ i − t r i ∣ s t , a t , π ] ( 2 ) Q_\pi(s_t,a_t)=E[U_t|s_t,a_t,\pi]=E[\sum_{i=t}^\infty\gamma^{i-t}r_i|s_t,a_t,\pi]\ \ \ (2) Qπ(st,at)=E[Ut∣st,at,π]=E[i=t∑∞γi−tri∣st,at,π] (2)
我们要做的就是对这个 Q π ( s t , a t ) Q_\pi(s_t,a_t) Qπ(st,at)进行逼近。怎么逼近呢?
对 U t U_t Ut,可以把它写成:
U t = ∑ i = t ∞ γ i − t r i = r t + γ ( ∑ i = t + 1 ∞ γ i − t − 1 r i ) = r t + γ U t + 1 ( 3 ) U_t=\sum_{i=t}^\infty\gamma^{i-t}r_i =r_t+\gamma(\sum_{i=t+1}^\infty\gamma^{i-t-1}r_i) =r_t+\gamma U_{t+1}\ \ \ (3) Ut=i=t∑∞γi−tri=rt+γ(i=t+1∑∞γi−t−1ri)=rt+γUt+1 (3)
因此
Q π ( s t , a t ) = E [ r t + γ U t + 1 ∣ s t , a t , π ] ( 4 ) Q_\pi(s_t,a_t)=E[r_t+\gamma U_{t+1}|s_t,a_t,\pi]\ \ \ (4) Qπ(st,at)=E[rt+γUt+1∣st,at,π] (4)
用神经网络 Q π ( s t , a t , w t ) Q_\pi(s_t,a_t,w_t) Qπ(st,at,wt)来逼近 Q π ( s t , a t ) Q_\pi(s_t,a_t) Qπ(st,at):
Q π ( s t , a t , w t ) ≈ Q π ( s t , a t ) ( 5 ) Q_\pi(s_t,a_t,w_t)\approx Q_\pi(s_t,a_t)\ \ \ (5) Qπ(st,at,wt)≈Qπ(st,at) (5)
Q π ( s t , a t , w t ) Q_\pi(s_t,a_t,w_t) Qπ(st,at,wt)的初值是随机给的,通过迭代调整它的权重参数,来使它不断逼近。训练的时候,首先,在 s t s_t st状态,随机指定每个 a t a_t at的动作价值函数 Q π ( s t , a t , w t ) Q_\pi(s_t,a_t,w_t) Qπ(st,at,wt),然后选择目前最好的 a t a_t at(显然是瞎选)。走一步,来到 s t + 1 s_{t+1} st+1,此时我们得到了 r t r_t rt,利用这个 r t r_t rt就可以优化(5)的 Q π ( s t , a t , w t ) Q_\pi(s_t,a_t,w_t) Qπ(st,at,wt)了:
Q π ( s t , a t , w t ) = r t + γ E [ U t + 1 ∣ s t + 1 , a t + 1 , π ] ( 6 ) Q_\pi(s_t,a_t,w_t)=r_t+\gamma E[U_{t+1}|s_{t+1},a_{t+1},\pi]\ \ \ (6) Qπ(st,at,wt)=rt+γE[Ut+1∣st+1,at+1,π] (6)
这个式子之所以能这么写,是因为已经来到了t+1时刻, r t r_t rt已经知道了,而一旦做出动作选择, ( s t + 1 , a t + 1 ) (s_{t+1},a_{t+1}) (st+1,at+1)也是可以知道的,未知的部分只有 U t + 1 U_{t+1} Ut+1了,所以它保留了期望的形式。
用(6)得到的 Q π ( s t , a t , w t ) Q_\pi(s_t,a_t,w_t) Qπ(st,at,wt)是比(5)的 Q π ( s t , a t , w t ) Q_\pi(s_t,a_t,w_t) Qπ(st,at,wt)更准确的,我们称其为TD target,它表示利用已知信息得到的对 Q π ( s t , a t ) Q_\pi(s_t,a_t) Qπ(st,at)最准确的估计值:
y t Q = Q π ( s t , a t , w t ) = r t + γ Q π ( s t + 1 , a t + 1 , w t ) = r t + γ max a Q π ( s t + 1 , a , w t ) ( 6 ) y_t^Q=Q_\pi(s_t,a_t,w_t)\\ =r_t+\gamma Q_\pi(s_{t+1},a_{t+1},w_t)\\ =r_t+\gamma \max_a Q_\pi(s_{t+1},a,w_t)\ \ \ (6) ytQ=Qπ(st,at,wt)=rt+γQπ(st+1,at+1,wt)=rt+γamaxQπ(st+1,a,wt) (6)
由于这里的 y t Q y_t^Q ytQ是已知的对 Q π ( s t , a t ) Q_\pi(s_t,a_t) Qπ(st,at)的最好的估计,它与上一时刻的估计值 Q π ( s t , a t , w t ) Q_\pi(s_t,a_t,w_t) Qπ(st,at,wt)是有差距的,我们就是利用这个差距来优化网络参数。定义loss函数为:
L t = 1 2 ( Q π ( s t , a t , w t ) − y t Q ) 2 ( 7 ) L_t=\frac{1}{2}(Q_\pi(s_t,a_t,w_t)-y_t^Q)^2\ \ \ (7) Lt=21(Qπ(st,at,wt)−ytQ)2 (7)
然后对参数w做梯度下降:
KaTeX parse error: Undefined control sequence: \grad at position 105: …i(s_t,a_t,w_t))\̲g̲r̲a̲d̲_{w_t}Q_\pi(s_t…
让t逐渐增大,直到走完一个episode,那么此时的 y t Q y_t^Q ytQ就是对 Q π ( s t , a t ) Q_\pi(s_t,a_t) Qπ(st,at)最好的估计了。但是没走完之前, y t Q y_t^Q ytQ也是在不断优化的,所以可能不需要走完也能得到很精确的对 Q π ( s t , a t ) Q_\pi(s_t,a_t) Qπ(st,at)的估计。可以肯定的是,走完一个episode,沿途经过的所有 Q π ( s t , a t ) Q_\pi(s_t,a_t) Qπ(st,at)都会被更新,但由于从每个状态都只出去了一次,尝试了一个 a t a_t at,而放弃了其他的,所以每个 Q π ( s t , a t ) Q_\pi(s_t,a_t) Qπ(st,at)都是片面的,而多走几个episode,就可以探索更多的路径,得到更全面的 Q π ( s t , a t ) Q_\pi(s_t,a_t) Qπ(st,at)值。对于已经经过的 ( s t , a t ) (s_t,a_t) (st,at),可以列出Q-Table记录它们的价值,以便下个episode再面临 s t s_t st的时候,可以选择最好的 a t a_t at。而下个episode已经知道了一部分 Q π ( s t , a t ) Q_\pi(s_t,a_t) Qπ(st,at),但还有未知的动作可能带来更大的收益,这就是”探索-利用“的平衡。
| Q-Table | a1 | a2 |
|---|---|---|
| s1 | q(s1,a1) | q(s1,a2) |
| s2 | q(s2,a1) | q(s2,a2) |
| s3 | q(s3,a1) | q(s3,a2) |
二、Deep Q Networks
DQN是 a multi-layered neural network,在Q-learning的基础上增加了target network和experience replay。
target network与在线网络几乎相同,只不过参数不是随时更新的,而是每隔τ步更新一次并保持。DQN用的target表示:
y t D Q N = r t + γ max a Q π ( s t + 1 , a , w t − ) ( 9 ) y_t^{DQN}=r_t+\gamma \max_a Q_\pi(s_{t+1},a,w_t^-)\ \ \ (9) ytDQN=rt+γamaxQπ(st+1,a,wt−) (9)
跟 y t Q y_t^Q ytQ比起来只有参数 w t − w_t^- wt−不同。
experience replay是指,观测到的状态转移会被存储一段时间,并从这个存储库中均匀采样,以更新网络。
target network和experience replay都显著提高了算法的性能。
三、double Q-learning
在Q-learning和DQN中,”选择下一步动作时使用的评价函数的参数“与”评价所有备选动作时使用的评价函数的参数“是相同的,也就是说,我根据现有的对备选动作的打分值,选出一个最好的,然后我再评估当前的动作价值,依然得到一个很高的分数。这样做存在的问题是,我可能会高估某个动作的分数,而我一旦高估他,我在选动作的时候就会选它,下次打分的时候依然高估,导致一旦出现”高估“就会影响我后面的状态轨迹。
为了避免这种影响,设置两套参数,把”打分“和”选动作“的过程分开。
为了便于对比,先把Q-learning的(6)写成:
y t Q = r t + γ max a Q π ( s t + 1 , a , w t ) = r t + γ Q π ( s t + 1 , max a Q π ( s t + 1 , a , w t ) , w t ) ( 10 ) y_t^Q=r_t+\gamma \max_a Q_\pi(s_{t+1},a,w_t)\\ =r_t+\gamma Q_\pi(s_{t+1},\max_a Q_\pi(s_{t+1},a,w_t),w_t)\ \ \ (10) ytQ=rt+γamaxQπ(st+1,a,wt)=rt+γQπ(st+1,amaxQπ(st+1,a,wt),wt) (10)
也就是说,选动作的时候用的是里面的 w t w_t wt,给选出来的动作再次打分的时候用的是外面的 w t w_t wt。DQN于其类似,只不过是间断性地更新 w t w_t wt。
而double Q-learning中,target写成:
y t D o u b l e Q = r t + γ Q π ( s t + 1 , max a Q π ( s t + 1 , a , w t ) , w t ′ ) y_t^{DoubleQ}=r_t+\gamma Q_\pi(s_{t+1},\max_a Q_\pi(s_{t+1},a,w_t),w_t') ytDoubleQ=rt+γQπ(st+1,amaxQπ(st+1,a,wt),wt′)
也就是说,选动作的时候用的是里面的 w t w_t wt,它是在线的参数;给选出来的动作再次打分的时候用的是外面的 w t ′ w_t' wt′。每次更新的时候,更新的是 w t w_t wt,如果想更新 w t ′ w_t' wt′,需要交换 w t w_t wt和 w t ′ w_t' wt′的地位。
选动作的时候用的是里面的 w t w_t wt,它是在线的参数;给选出来的动作再次打分的时候用的是外面的 w t ′ w_t' wt′。每次更新的时候,更新的是 w t w_t wt,如果想更新 w t ′ w_t' wt′,需要交换 w t w_t wt和 w t ′ w_t' wt′的地位。
形象的理解:某选秀节目分两组评委,第一组给选手打分并选出小组冠军,然后第二组评委再给他重新打分,这个分数作为选手的分数被记录。两组评委过一段时间交换一次。
参考资料
[1] 深度强化学习(全)
[2] 【强化学习】Q-Learning算法详解
[3] H. Van Hasselt, A. Guez, and D. Silver, “Deep reinforcement learning with double q-learning,” in Proceedings of the AAAI Conference on Artificial Intelligence, vol. 30, no. 1, 2016.