【论文笔记】Dual-arm robotic manipulation of flexible cables
【论文笔记】Dual-arm robotic manipulation of flexible cables
Abstract
-
提出方法:
提出了一种多机器人操纵电缆形状的框架。
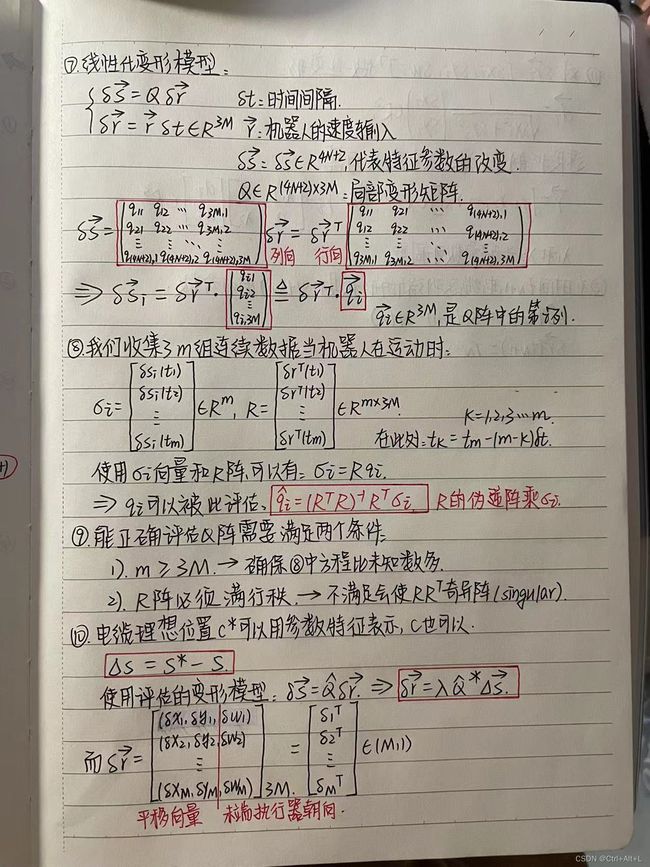
该形状由一个傅里叶级数参数化。利用形状参数在线估计了电缆的局部变形模型。
利用变形模型,对机器人应用速度控制方法,使电缆变形成期望的形状
-
最后做了实验
I. INTRODUCTION
变形的概念被定义为物体从参考配置到当前配置的转换。
配置是一个包含物体中所有部分的位置的集合。
变形是力引起的应力场导致的。
Cables arrangement, pick and place and insertion are common tasks.
Model Based Method
1. Hopcroft: a vision system was used to guide the robot and an abstract description of the cable configuration was developed
2. Chen and Zhang: a non-linear model to characterize the deformation of a flexible beam, and applied the model for manipulation.
用非线性模型来描绘一束柔性光的形变,并将这个应用到操作模型中来
3. Wakamatsu: a more complex model of linear objects considering twist(捆成一束的电缆) was developed
在几何约束条件下,通过最小化势能,可以得到物体的稳定形状
4. Nakagaki: extended the Wakamatsu’s model
将这个模型应用在了电缆操作上,并且用在了电缆插入(intersection)中
5. Kosuge: modeled the static deformation of a sheet metal by Lagrange’s equation based on a finite element model
基于有限元的拉格朗日方程来对金属薄片的静态形变做建模
上述场景都是在变形之前对变形物体做建模,但事实上形变物体的材料工艺并非均匀一致,因此上述的方法难以泛化到更加通用的场景,缺少鲁棒性
Model Free Method
D. Navarro-Alarcon, Y. Liu, J. G. Romero, and P. Li, “Model free visually servoed deformation control of elastic objects by robot manipulators,” IEEE Trans. on Robotics, vol. 29, no. 6, pp. 1457–1468, 2013.
D. Navarro-Alarcon, Y. Liu, J. G. Romero, and P. Li, “On the visual deformation servoing of compliant objects: Uncalibrated control methods and experiments,” Int. Journal of Robotics Research, vol. 33, no. 11, pp. 1462–1480, 2014.
D. Navarro-Alarcon, H. M. Yip, Z. Wang, Y. Liu, F. Zhong, T. Zhang, and P. Li, “Automatic 3-D manipulation of soft objects by robotic arms with an adaptive deformation model,” IEEE Trans. on Robotics, vol. 32, no. 2, pp. 429–441, 2016.
控制动作是由一视觉反馈不断更新的在线变形模型。
在这三篇论文中,变形只能用点、角度和曲率位移来表征。defined as [13]
D. Navarro-Alarcon and Y.-H. Liu, “Fourier-based shape servoing: A new feedback method to actively deform soft objects into desired 2-D image contours,” IEEE Trans. on Robotics, 2017
这篇文章利用截断傅里叶级数提出了一种封闭轮廓变形的更一般的几何表示。
Proposed Method in this context
- 扩展截断傅里叶级数的方法,将电缆操作扩展到用多机械臂表示
- 在[13]仅有平移的基础上,增加了操作器具的旋转操作
- 这项工作的目的是为一个多臂机器人建立一个框架,通过基于视觉的控制和在线估计的变形模型来完成将柔性电缆变形为所需形状的任务。
- 只考虑在二维平面上的操作,三维操作在未来研究
II. PROBLEM FORMULATION
考虑一个在二维平面上操纵电缆的多臂机器人。
该电缆可以看作是一个动态未知的系统,它接受来自机器人的输入。
每个末端执行器分别应用3个速度输入:操纵平面上的两个平移速度, x ˙ \dot{x} x˙ 和 y ˙ \dot{y} y˙,以及沿垂直于操纵平面的轴的一个角速度 ω ω ω。

The shape of the cable is continuously observed by a static camera perpendicular to the manipulation plane(垂直于操作平面).
The cable shape on the camera image is represented as c ⃗ = [ u ⃗ , v ⃗ ] T \vec{c}=[\vec{u},\vec{v}]^{T} c=[u,v]T , where u ⃗ \vec{u} u and v ⃗ \vec{v} v are image coordinates of pixels sampled along the cable(随着电缆采样的图片点坐标).
We represent the desired cable shape by c ∗ c^{\ast} c∗.
The problem is to use the control inputs r \mathbf{r} r to drive the
cable from its initial shape c ⃗ 0 \vec{c}_{0} c0 to the desired shape c ∗ ⃗ \vec{c^{\ast}} c∗ with
an on-line estimated deformation model by visual feedback.
III. METHODS
- first transform the cable shape into feature parameters(转换成特征参数)
- model locally the relationship between the robot motion and the changes in the shape parameters(局部建模机器人运动与形状参数变化之间的关系)
- derive the control strategy to deform the cable into the desired shape based on such deformation model(基于该变形模型,推导出使电缆变形为所需形状的控制策略)
A. Shape feature parameters

B. Deformation model estimation
C. Shape servo-controller

IV. EXPERIMENTAL VALIDATION
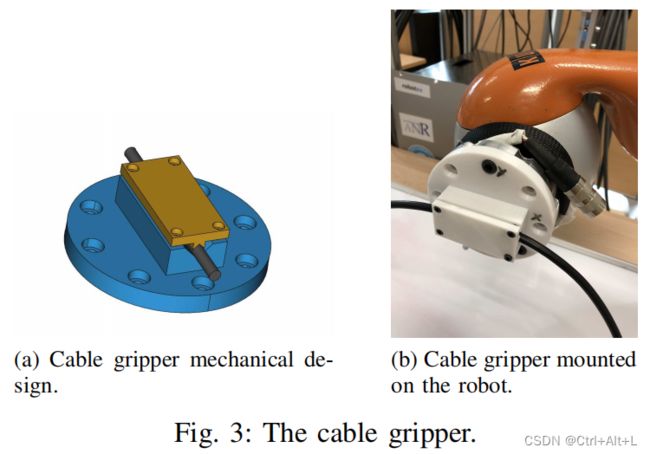
A. Experimental setup

B. Image processing
图像处理并不是本研究的主要组成部分,因此我们简化了环境,在桌子上放了一块白板作为二维平面,并使用黑色电缆来进行操作。
- The color image is converted into a grayscale image. (RGB转灰度图)
- By thresholding the grayscale image, we can segment the cable from the image. (二值化分割)
- The target shape is drawn on the white board with red color markers. (红颜色表示电缆的目标位置)
- To detect the target shape, we transform the image representation from RGB to HSV, and then apply thresholding to segment the red shape from the image. (将RGB转HSV,调参分割红颜色目标电缆)

C. Experiments
选择 N = 2 N=2 N=2 作为傅里叶级数的阶
- 让双臂机器人操作的电缆不会太复杂,不需要太多高阶,2阶就足够了
- N越来越大时候,系统越难被驱动,增加了陷入局部最小的可能性
- 增量 N N N 将增加计算的复杂度



V. CONCLUSIONS AND FUTURE WORK
The under-actuation problem (highlighted in the last experiment) can be addressed by reducing the number of shape feature parameters. In future research, we intend to work on different representation of the shapes. We would also like to investigate path planning strategies to further enhance the convergence of the algorithm.