2022CS231n笔记-正则化和优化算法
代码部分:全连接层网络_iwill323的博客-CSDN博客
目录
正则化
问题引出
正则化作用
L1和L2正则化
优化算法
随机梯度下降Stochastic Gradient Descent (SGD)
存在的问题
SGD + Momentum
原理
参数处理
pytorch中的SGD + Momentum
Nesterov Momentum
原理
评价
Adagrad
原理
优缺点
RMSprop
pytorch中的RMSprop
Adam
公式
偏移矫正版本
学习率调优
不同学习率的影响
学习率衰减方法
使用建议
正则化
问题引出
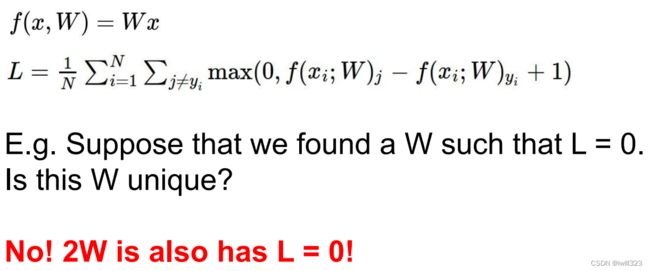
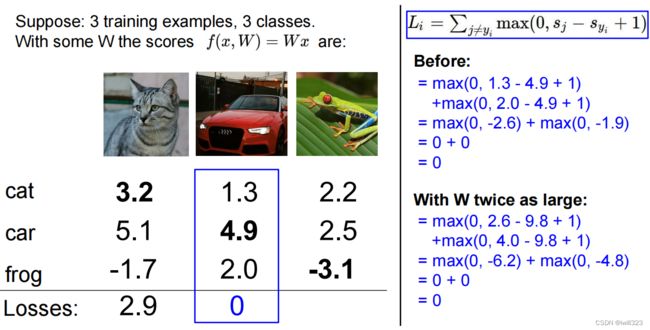
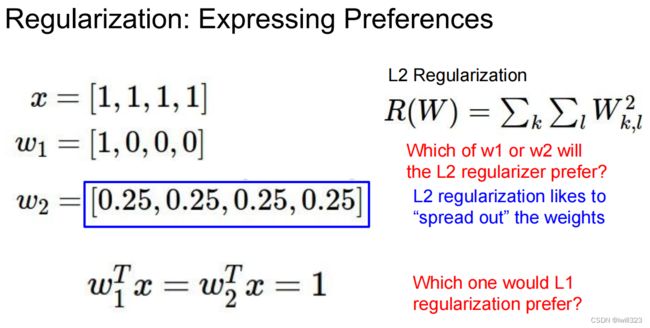
How do we choose between W and 2W?
正则化作用
在损失函数中额外引入了正则项,用于对权重的调整,在最小化loss的同时,权重值的选择被限定了。比如,在W和2W之间,显然是选择了W
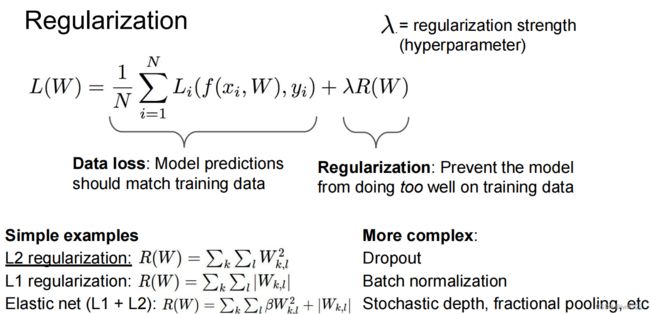
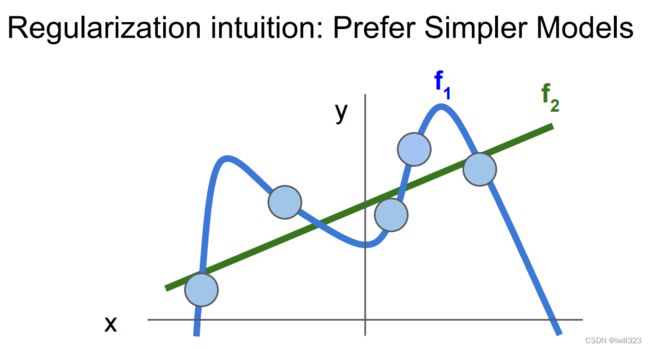
加入了正则化项后,要想最小化loss,那么权重W也要尽可能的小,于是一些冗余的权重被抑制(比如高此项,参照下图),模型变得简单,防止过拟合
L1和L2正则化
L2正则化倾向得到小而分散的权重,最终结果能考虑到各种输入的影响(如w2),而不是少数输入的影响(如w1),提高了模型的泛化能力,减弱过拟合
L1正则化倾向得到稀疏的权重(类似于w1)
优化
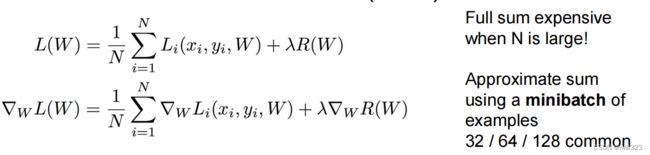
随机梯度下降Stochastic Gradient Descent (SGD)
现在一般使用minibatch
# Vanilla update
x+=-learning_rate*dx
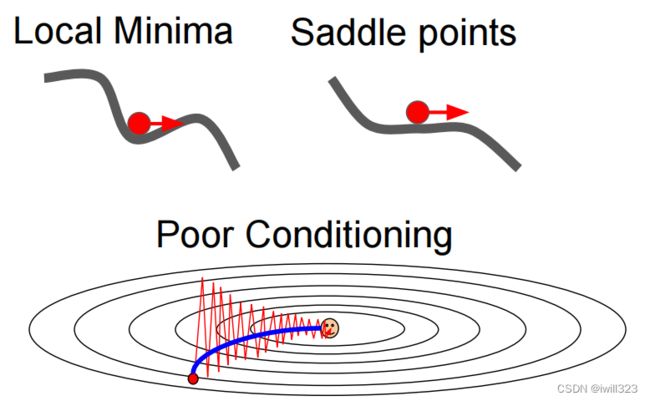
存在的问题
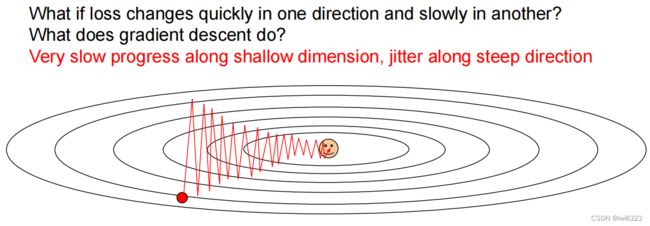
1.不同维度变化率差别大的时候,下降慢
在下图中,变量梯度并不指向最小值,输出对x方向输入变化不敏感,对y方向敏感,于是SGD算法在y方向会强烈振动,而在x方向进展缓慢
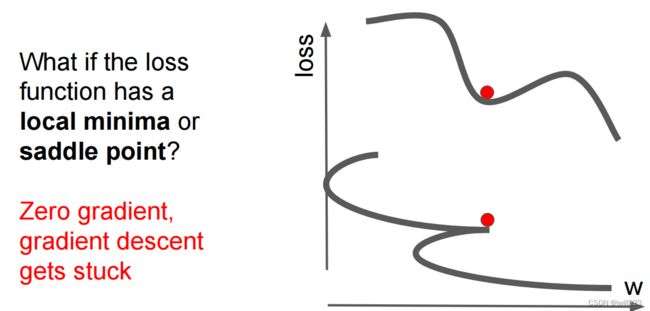
2.可能会陷于局部最优点(低维)或在鞍点计算进展缓慢(高维)
3.由于使用了minibatch,在计算过程加入了噪声,走了弯路,慢

SGD + Momentum
计算过程大大加快: With Momentum update, the parameter vector will build up velocity in any direction that has consistent gradient.
原理
参考吴恩达的深度学习课程,我是这么理解:vt的初始值是0,所以vt其实就是计算过程中得到的历史梯度的叠加。并且考虑到,不同维度(方向)上梯度的计算是互不干涉的。参考上图,y方向的梯度振动很大,叠加的过程中相当一部分被抵消掉了,于是y方向的增量不大,起码不会像以前那样振动;x方向上的梯度一直是往右的,新算出来的x方向的梯度要加上原来计算出来的梯度,于是叠加起到了x方向上加速变化的作用,就像加速度之于速度(这也是将算法命名为Momentum动量的原因)。最终得到了蓝色线那样的优化过程。
对于上面说的的鞍点和局部最小值问题,由于动量(过往dx)的影响,x能冲过这两个陷阱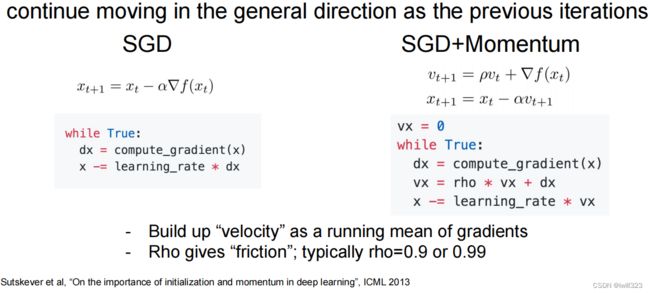
参数处理
Here we see an introduction of a v variable that is initialized at zero, and an additional hyperparameter (mu) (its typical value is about 0.9). When cross-validated, this parameter is usually set to values such as [0.5, 0.9, 0.95, 0.99]. Optimization can sometimes benefit a little from momentum schedules, where the momentum is increased in later stages of learning. A typical setting is to start with momentum of about 0.5 and anneal it to 0.99 or so over multiple epochs.
出自官网CS231n Convolutional Neural Networks for Visual Recognition
pytorch中的SGD + Momentum
看上去和课件中写的计算方式一模一样

Nesterov Momentum

原理
先介绍Momentum的另一种写法:
# Momentum update
v = mu * v - learning_rate * dx
# integrate velocity
x += v # integrate position和正常的SGD相比,Momentum算法给x增加了一项mu*v,可以视作动量矫正。在使用SGD算法时,我们是利用x点的梯度对x点进行调整,那么Nesterov Momentum的思想是将从矫正后的点(x+mu*v)开始做梯度下降,这样与SGD算法达到了形式上的一致:
x_ahead = x + mu * v
# evaluate dx_ahead (the gradient at x_ahead instead of at x)
v = mu * v - learning_rate * dx_ahead
x += v使用x_ahead = x + mu * v做变量替换

评价
根据官网CS231n Convolutional Neural Networks for Visual Recognition:Nesterov Momentum enjoys stronger theoretical converge guarantees for convex functions and in practice it also consistenly works slightly better than standard momentum.也就是说Nesterov Momentum比标准的Momentum要更好用
Adagrad
原理
# Assume the gradient dx and parameter vector x
cache += dx**2
x += - learning_rate * dx / (np.sqrt(cache) + eps)特点是,计算dx的时候,考虑过往计算梯度的历史。注意这里对dx采用的是取平方,这样过往振动大的方向上,新算出来的梯度要被大的数相除,学习率被自动调小了,更新更为谨慎;过往振动小或者几乎不怎么更新的方向上,学习率被自动调大了,学习加速。
优缺点
优点:可以消除梯度下降中的摆动,不会在振动大的方向上偏离。于是可以用一个更大学习率,加快算法学习速度。
缺点:A downside of Adagrad is that in case of Deep Learning, the monotonic learning rate usually proves too aggressive and stops learning too early. 学习率单调下降,算着算着变成了0,过早停止学习
RMSprop
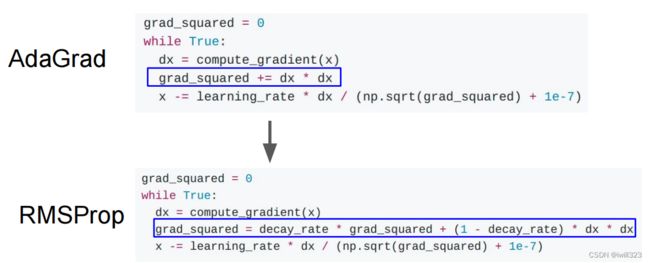
Here, decay_rate is a hyperparameter and typical values are [0.9, 0.99, 0.999]. RMSProp still modulates the learning rate of each weight based on the magnitudes of its gradients, which has a beneficial equalizing effect, but unlike Adagrad the updates do not get monotonically smaller.
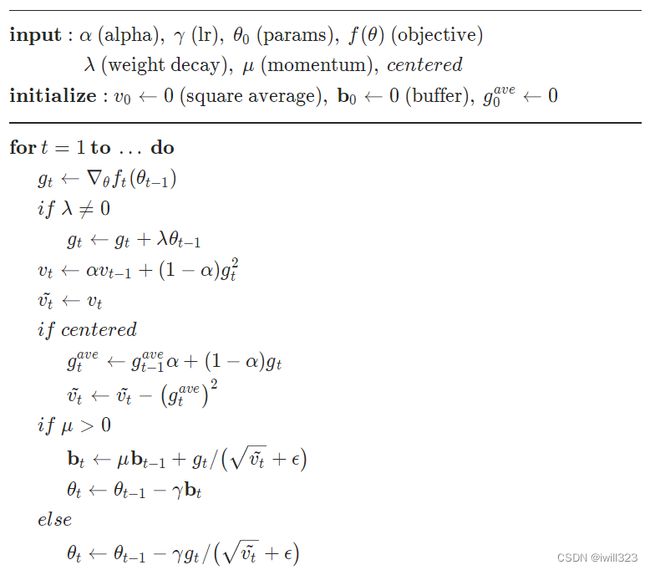
pytorch中的RMSprop
Adam
公式
m = beta1*m + (1-beta1)*dx
v = beta2*v + (1-beta2)*(dx**2)
x += - learning_rate * m / (np.sqrt(v) + eps)
和 RMSprop相比,就是把x更新式子中的dx变成了m而已。RMSProp和momentum的结合
推荐值:eps = 1e-8, beta1 = 0.9, beta2 = 0.999,learning_rate = 1e-3 or 5e-4
偏移矫正版本
之所以要矫正,是因为first moment和 second moment一开始的值接近0 。虽然在x的计算中,是小数m除以小数np.sqrt(v) ,但是搞不好这个结果非常大,就会影响到一开始的计算,所以采用偏移矫正,让m变大
# t is your iteration counter going from 1 to infinity
m = beta1*m + (1-beta1)*dx
mt = m / (1-beta1**t)
v = beta2*v + (1-beta2)*(dx**2)
vt = v / (1-beta2**t)
x += - learning_rate * mt / (np.sqrt(vt) + eps)学习率调优
不同学习率的影响
学习率小了容易发散,大了得不到好的优化结果甚至发散,可以理解为最优值的调整只在毫厘之间,如果学习率大了,那么每次权重变化太大,每每“跨过”最优值

根据课程PPT,all of these are good learning rates. 我的理解是,选择高学习率和低学习率都是对的,也都是错的。什么阶段就做什么样的事情,学习率用在合适的阶段就是对的,用在不合适阶段就是错的。重在计算过程中对学习率的调整
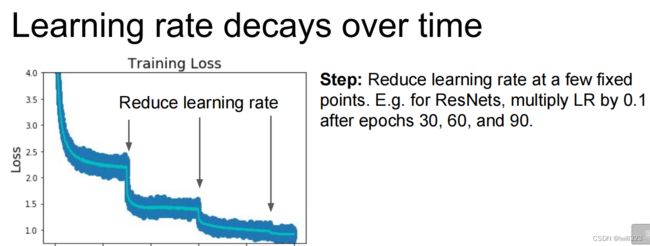
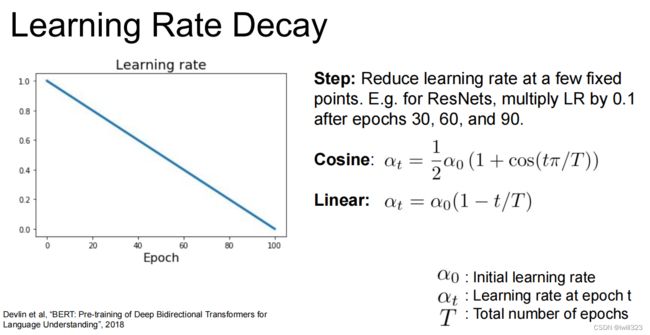
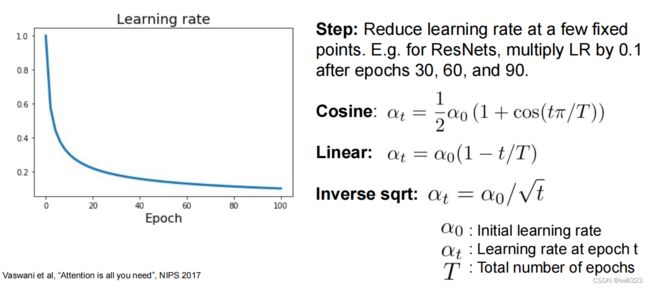
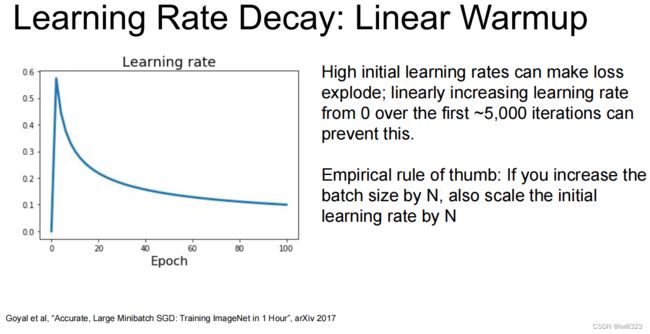
学习率衰减方法

使用建议
- Adam is a good default choice in many cases; it often works ok even with constant learning rate
- SGD+Momentum can outperform Adam but may require more tuning of LR and schedule
- If you can afford to do full batch updates then try out L-BFGS (and don’t forget to disable all sources of noise)
官方PPT网站Index of /slides/2022 希望引用图片没有侵权