多智能体强化学习- COMA
COMA:Counterfactual Multi-Agent Policy Gradients
论文地址:https://arxiv.org/pdf/1705.08926.pdf
代码地址:https://github.com/oxwhirl/pymarl/tree/master/
摘要
本文提出一种多主体的actor-critic,称为反事实多主体策略梯度(COMA)。文章采用CTED的训练方式。利用反事实基线来解决多智能体的信用分配问题。文章的主要思想:
1:使用一个集中的critic,在训练的时候获取所有智能体的信息(on-policy)
2:反事实基线:解决信用分配问题
3.critic网络对反事实基线进行高效计算。
方法
作者是基于Actor-Critic结构来设计MARL算法的。最直接的方法是每个智能体利用该结构独立学习,称作independent actor-critic (IAC)。但是IAC有个明显的问题,就是不考虑其它智能体的信息,这将导致训练过程不稳定。(如果IAC在训练的过程中考虑所有智能体的信息,利用CTDE训练方法,则和MADDPG方法没有太大区别)。
首先,COMA使用了一个集中的Critic,critic以全局状态s或者所有智能体的联合行动-观测历史 τ \tau τ作为输入.
(信用分配问题)在协作任务下的多智能体系统中,奖励函数是全局共享的,所以只需要一个critic网络就可以了。但是那样的话,所有的智能体优化目标都是同一个。因此,对每个actor网络来说,从critic那边反向传播过来的误差都是一样的。令每个智能体直接利用该集中式的critic计算策略梯度可以得到:
g = ∇ θ π l o g π ( u ∣ τ t a ) ( r + γ V ( s t + 1 ) − V ( s t ) ) g=\nabla_{\theta^{\pi}}log\pi(u|\tau_t^a)(r+\gamma V({s_t+1})-V(s_t)) g=∇θπlogπ(u∣τta)(r+γV(st+1)−V(st))
这种“吃大锅饭”式的训练方式显然不是最有效的,因为每个actor网络对整体性能的贡献不一样,贡献大的反向传播的误差应该要稍微小些,贡献小的其反向传播误差应该要大一些。最终的目标都是优化整体的性能。所以,受到差分奖励的影响,作者提出利用counterfactual baseline来解决该问题!
在差分奖励中,每个智能体的奖励设计为:
D α = r ( s , u ) − r ( s , ( u − a , c a ) ) D^{\alpha}=r(s,u)-r(s,(u^{-a},c^a)) Dα=r(s,u)−r(s,(u−a,ca))
即全局奖励减当智能体a的动作替换为默认动作 c a c^a ca时全局奖励的差值。a代表智能体,u表示动作,-a表示除a以外的智能体集合。
这个方法的问题在于:需要大量模拟环境去评估不同智能体的 r ( s , ( u − a , c a ) r(s,(u^{-a},c^a) r(s,(u−a,ca),同时,需要认为设定默认动作作 c a c^a ca。COMA利用一个集中的critic来解决这个问题。
集中式的critic计算 Q ( s , u ) Q(s,u) Q(s,u)(联合动作u的Q值估计),对于每一个智能体a,计算一个优势函数,将当前动作 u a u^a ua的Q值与保持其他智能体动作 u − a u^{-a} u−a不变单独边缘化 u a u^a ua之后所对应的期望Q值的差值:
A a ( s , u ) = Q ( s , u ) − ∑ u ′ a π a ( u ′ a ∣ τ a ) Q ( s , ( u − a , u ′ a ) ) A^a(s,u)=Q(s,u)-\sum_{u'a}\pi^a(u^{'a}|\tau^a)Q(s,(u^{-a},u'^a)) Aa(s,u)=Q(s,u)−u′a∑πa(u′a∣τa)Q(s,(u−a,u′a))
A a ( s , u ) A^a(s,u) Aa(s,u)为每个智能体计算一个单独的基准来推测只有a的动作变化时会发生什么,该方法直接通过智能体的经验学习得到,而无需依赖额外的仿真,单独的奖励模型或者认为设计的默认动作。这里的反事实基准就是 b ( s ) = π a ( u ′ a ∣ τ a ) Q ( s , ( u − a , u ′ a ) ) b(s)=\pi^a(u^{'a}|\tau^a)Q(s,(u^{-a},u'^a)) b(s)=πa(u′a∣τa)Q(s,(u−a,u′a))实际上就是基准 b ( s ) b(s) b(s), A a ( s , u ) A^a(s,u) Aa(s,u)就是 G t − b ( s ) G_t-b(s) Gt−b(s),它的作用是进行梯度上升操作,因此该方法的基础就是带基准的策略梯度算法。相当于在多智能体系统中,r是系统奖励, Q ( u , a ) Q(u,a) Q(u,a) 是系统奖励对应的Q值,难以反映单个智能体对系统的贡献,而通过减去一个基准值之后得到的 A a ( s , u ) A^a(s,u) Aa(s,u) 却能够反映单个智能体的Q值,并且不会改变策略梯度的值.
利用critic表征对反事实基准进行高效估计: π a ( u ′ a ∣ τ a ) Q ( s , ( u − a , u ′ a ) ) \pi^a(u^{'a}|\tau^a)Q(s,(u^{-a},u'^a)) πa(u′a∣τa)Q(s,(u−a,u′a))的估计需要大量的计算,另外,网络的输出节点等于联合动作空间的大小 U n U^n Un,为了解决这个问题,COMA提出一种新的critic表征方法。
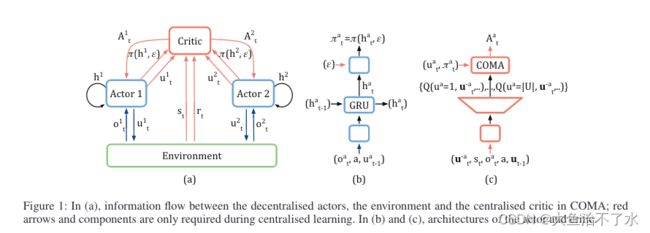
如图(c)所以,每一时刻,将其他智能体的动作 u t − a u_t^{-a} ut−a作为网络输入的一部分,输出是智能体a的所有可能动作的Q值,这样,只需要对每个智能体进行一次单独的actor和critic的前向计算,就能够高效的得到优势函数。输出节点的数量从 U n U^n Un变成了 U U U。
另外,本文考虑的是离散动作,实际上COMA能够轻易地扩展到连续动作空间中,此时只需要利用蒙特卡洛方法计算优势函数中的期望,或者使用函数形式,使其可分析。
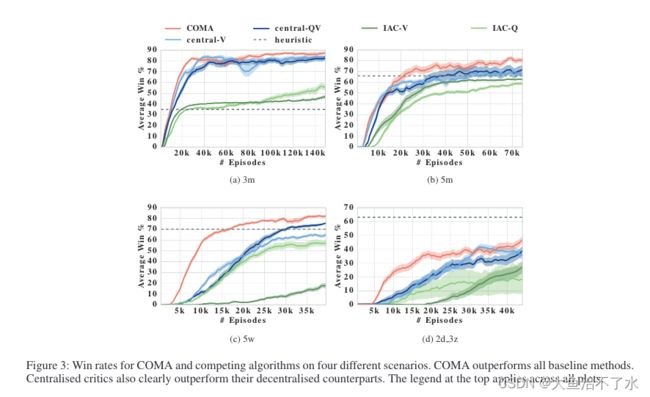
实验部分
实验环境,StarCraft,