delphi cxgrid读取本地image_读取多个(海康\大华)网络摄像头的视频流 (使用opencv-python),解决实时读取延迟问题...

实时读取视频流(封面使用五个摄像头是因为我手头最多只有五个),解决实时读取延迟卡顿问题
做计算机视觉的算法开发,可能会碰到实时获取图像并处理的问题,我写了一个简单的实例,可以实时读取多个网络摄像头。运行视频预览如下↓ (可以看到视频播放流畅,达到30fps,同时延迟小于0.3s)

2018-06-17 初版 Yonv1943 2018-06-25 小修改,deamon,setattr(), if is_opened
2018-07-02 添加单摄像头run(): # single camera,和多摄像头run_multi_camera()
2018-11-21 单线程读取单个摄像头,多进程读取多个摄像头
2019-02-14 将“多线程”改正为“多进程”谢谢 @知who 的纠正
2019-05-04 增加大华摄像头rtsp协议 我在标题里不小心用爱发电了,为了公平起见,我把海康竞争对手大华也加上去。网络摄像头基本都支持rtsp协议,所以可以用本方法读取。
2019-07-04 增加将多个摄像头的画面有序地读取到同一个程序 run_multi_camera_in_a_window()
2019-09-06 回复评论:目标检测
2019-10-17 回复评论:图片刚放进去队列就取出来,队列里面岂不是没有图片? 2019-10-31 回复评论:网络卡顿而无法获取视频信息,这个应该怎么处理?
2019-11-13 回复评论:为何有 ipv4 与ipv6两种地址?
完整版Demo:
实现上述功能的完整示例Demo (已经尽可能短),你也可以在我的GitHub上下载到最新的代码,如果星星多,那么我还会继续加功能:
import 解决实时读取延迟卡顿的关键代码如下,我使用Python自带的多线程队列:
import 如果你可以成功运行上们的代码,那么恭喜。如果你已经理解代码,那么你不需要看下面的内容。
如果你想要进一步理解代码,那么下面的内容是:
OpenCV官网提供的简单版Demo(无法避免延迟卡顿)
简单版Demo:
如果你可以成功运行上们的代码,那么恭喜OpenCV官网给出的视频流读取示例代码,经过简单修改,如下:
def run_opencv_camera():
video_stream_path = 0 # local camera (e.g. the front camera of laptop)
cap = cv2.VideoCapture(video_stream_path)
while cap.isOpened():
is_opened, frame = cap.read()
cv2.imshow('frame', frame)
cv2.waitKey(1)
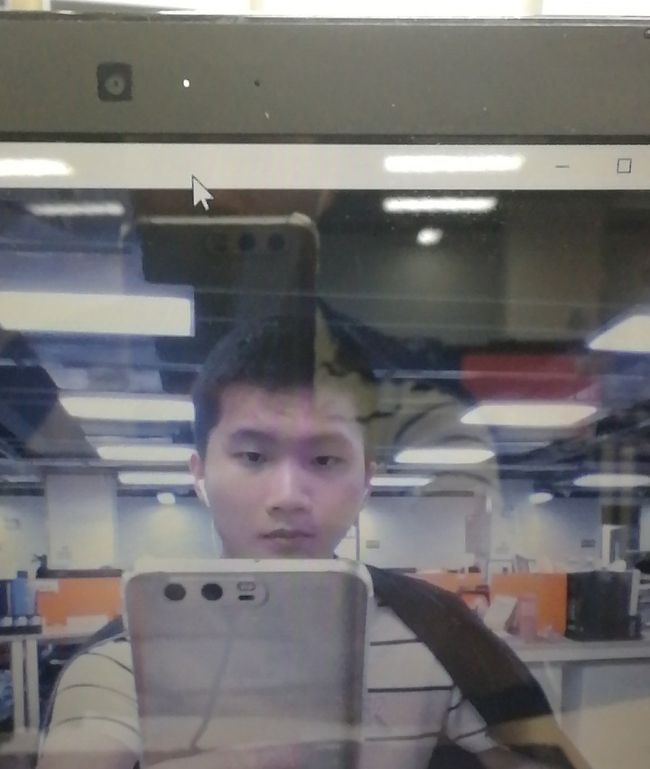
cap.release()当 video_stream_path = 0 的时候,电脑会开启默认摄像头,比如笔记本电脑的前置摄像头 ↓
当我们需要读取网络摄像头的时候,我们可以对 cap = cv2.VideoCapture(括号里面的东西进行修改),填写上我们想要读取的视频流,它可以是:
- 数字0,代表计算机的默认摄像头(例如上面提及的笔记本前置摄像头)
- video.avi 视频文件的路径,支持其他格式的视频文件
- rtsp路径(不同品牌的路径一般是不同的,如下面举出的海康与大华,详细情况查看 附录的「关于rtsp协议」)
user直接使用参考官网写出来的简单版Demo有延迟卡顿问题,如果读取速度低于视频流的输出速度,窗口显示的图片是好几秒钟前的内容。一段时间过后,缓存区将会爆满,程序报错,我可以使用rtsp读取摄像头:
def 下面使用使用多线程队列,解决这个延迟卡顿问题。
完整版Demo(使用多线程队列,解决延迟卡顿问题,读取多个摄像头):
def 关键部分解释:我使用Python3自带的多线程模块,创建一个队列,线程A从通过rtsp协议从视频流中读取出每一帧,并放入队列中,线程B从队列中将图片取出,处理后进行显示。线程A如果发现队列里有两张图片(证明线程B的读取速度跟不上线程A),那么线程A主动将队列里面的旧图片删掉,换上新图片。通过多线程的方法:
- 线程A的读取速度始终不收线程B的影响,防止网络摄像头的缓存区爆满
- 线程A更新了队列中的图片,使线程B始终读取到最新的画面,降低了延迟
import 模拟实时图片处理
完整版代码可以使用多线程队列,解决延迟卡顿问题,并读取多个摄像头。我们把等待时间从1毫秒,增加到1秒(1000ms),模拟实时处理图片中的某一个耗时操作。
cv2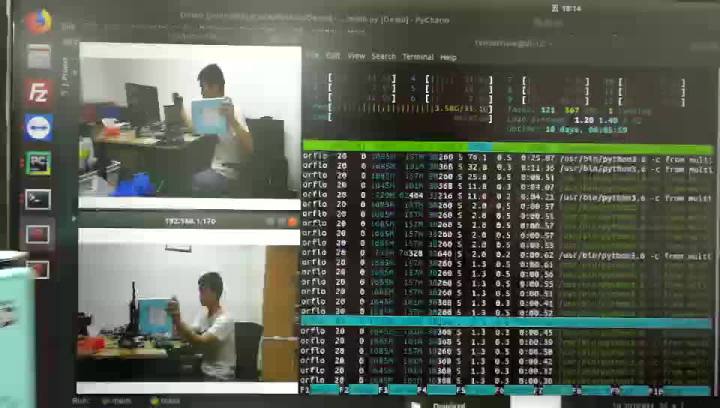
注:此处的视频与文章开头的视频不同,因为左下角摄像头模拟了耗时1秒的图片处理延时操作,模拟实时图片传入处理速度慢的函数后 的情况。与此同时左上角的视频作为对照。
可以看到,左上角是正常读取窗口,20fps,延迟0.4秒。而左下角的模拟延迟视频显示窗口变为1fps,但是延迟没有变化,依然是0.4秒,可以说:做到了读取实时图片的效果。所有代码都可以从我的GitHub下载到完整注释版。
附录是对评论区的回复,集中了常见问题。
关于rtsp协议:
通过rtsp协议读取视频流: @对镜子傻笑 下面依次是我在网络上查到的海康与大华 rtsp 读取路径。经过测试,我手头的海康摄像头支持前面两种读取方式(新旧两种)。大华摄像头用第三种读取方式。
video_stream_path 海康、大华IpCamera RTSP地址和格式(原创,旧版)- 2014年08月12日 23:01:18 xiejiashu
最新(2017)海康摄像机、NVR、流媒体服务器、回放取流RTSP地址规则说明 - 2017年05月13日 xiejiashu
我在Win10、Ubuntu16 系统上,可以直接使用使用rtsp协议读取网络摄像头视频流。如果你碰到问题,那么你可能需要安装XviD 与 FFmpeg ,如下:
Ubuntu16我用过的摄像头主要有(都支持rtsp协议) :
- 海康人脸摄像头 XXX
- 海康星光夜视XXX
- 海康DS-IPC-B12
- 大华云台DH-PTZ12203UE-GN-P
- @瞎bb队长 一般的,搜索的时候带上rtsp就可以了
关于读取卡顿:
我已经在很多摄像头上面实验过了,本文使用的代码的性能如下:
环境:局域网 + 6个不同的POE供电海康摄像头
- 工控机(赛扬1.9G*4),CPU Celeron(R) J1900 ,4个摄像头,1080P,最慢的延迟1.2秒
- 笔记本(i3移动版 2.4G*4),CPU i3-3110M ,6个摄像头,1080P,最慢的延迟 0.4秒
备注:如果出现卡顿,请检查 网络使用率,CPU使用率。
特别备注:如果你只有一个摄像头,为了测试多个摄像头的读取效果,你开启了多个读取窗口同时读取同一个摄像头,你会发现:“对于一般的摄像头,开启两个以上就会卡顿”,而这样操作是不对的。因为摄像头本身也是一个“服务器”,它无法为多个目标传输视频流,会遇到传输瓶颈。
这段代码已经在多种环境下,在多个不同的摄像头上面测试过了,我认为它是可靠的。如果出问题,请在评论留言,不要私信我。我会抽时间把这篇文章以及代码整理一下的。
Python的列表解析:
使用列表解析,可以缩短代码,但是对于列表解析是否提高了Python代码的可读性,仍然是有争议的。
processes 有序地收集多个摄像头拍摄的画面,并显示出来 (回复@Haulz 等人)
本文的封面图片采用了一个主进程打开了了5个子进程,每个子进程负责一个摄像头实时画面的读取与显示。

如果你需要收集多个摄像头拍摄的画面(也就是将5个子进程拍摄到的图片收集 (collect) 到一个进程中去),那么我们需要这样子处理:(将前文出现过的两个函数稍作修改,即可得到,代码同步更新到Github,觉得有用就给星星吧)
run_multi_camera_in_a_window实现效果截图:把两个摄像头收集到的实时画面传给同一个进程:
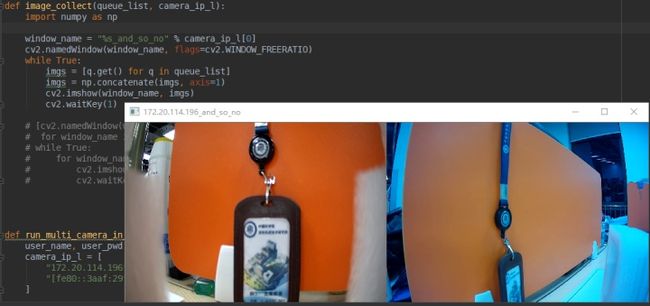
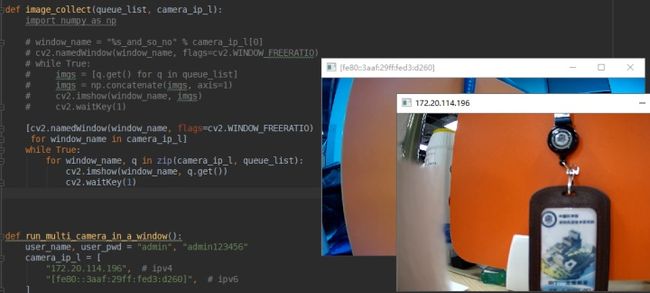
注释部分的实现效果截图:(打开多个OpenCV imshow 窗口,且画面有序显示,不混淆)
本来以为这个实现是很简单了,没想到已经有超过3个人私信问过相同的问题了,所以我写下这部分的内容。因为觉得没有技术含量,不足以写入正文,因此放在了文末的附录内。
视频读取已经结束, 而程序没有自动退出 @风荷一一(这个问题不太值得回复)
问题描述 @风荷一一:“将rtsp换成本地视频后,当视频结束后会出现报错。cpp:352: error: (-215:Assertion failed),且继续占用CPU”
cap 在显示之前做一个目标检测,怎么实现? @哥白尼的天体论
曾伊言:实时视频传入深度学习目标检测模型进行检测zhuanlan.zhihu.com把读取模块与计算模块分开,详细内容请看上面的文章「实时视频传入深度学习目标检测模型进行检测」:
很明显,单线程是低效率的,CPU工作的时候,GPU在围观,反之亦然:
线程0: CPU读取图片→ GPU处理图片(如:目标检测)→ ... ...
使用多线程的一个简单高效的方案:
线程0: CPU读取图片↘ CPU读取图片↘ ... ...
线程1: GPU处理图片 GPU处理图片 ... ...刚刚放进去一张图片,然后马上取出来,队列里面岂不是一张图片也没有? (虽然你后面似乎知道答案了,自己把评论删除掉,但是问这个问题的人太多了)@TuringYang
程序其实是这样运作的:image_put 与 image_get 是同时运行的。image_put 放入图片后,如果没有 image_get 把图片取走,那么 image_put 就自己把图片取走,实时替换成新的图片。
def 当 image_get 运行到 q.get() 处,如果队列里面没有图片,那么它会在这里等,直到 image_put 把图片放入队列,它把这张图片取走后才继续往下运行。由于image_get 一直在队列处等候,因此它总是可以在image_put 把图片删除前 抢先把图片取走,这是这个程序做到实时更新并且减少延迟的基本方法。
网络卡顿而无法获取视频信息,应该处理? @Wang
这篇文章解决的是:由“处理图片的速度”慢于“摄像头拍摄产生实时图像的速度”所导致的延迟。而不是 由网络条件不好导致“接收图片的速度”过慢导致的延迟。解决方法:
- 减少视频流大小:降低帧率、减小画幅、降低码流、主码流→辅码流、H264→H265等
- 清空摄像头缓存:刷新与摄像头的连接,重新运行 cap = cv2.VideoCapture(***)
问题分析:工作中的摄像头会把未被接受的视频流保存在自己的缓存里,如果缓存满了它就会报错(接收端会有xxxxxxxx sRGB xxxx 之类的报错)。只要清空摄像头缓存,就能解决这个问题,因此我们可以刷新与网络摄像头的连接 来掩盖这个问题。
能够应对网络延迟的视频流协议应该是:RTMP、WebRTC 之类的协议。而RTSP不在此列。
关于私信:
不建议通过私信与我进行交流,有问题请写在评论区。它的好处:常见的问题可以被所有人看到;节省时间;避免重复回答。
在评论区指出的问题,我会修改到正文中,并注明贡献者的名字。
在评论区提出的问题,我可能会尝试解答,并添加到正文中。
交流是促进社区与自身成长的重要途径,欢迎评论,谢谢大家。