作者:RayChiu_Labloy
版权声明:著作权归作者所有,商业转载请联系作者获得授权,非商业转载请注明出处
目录
win10的OpenVINO安装
使用OpenVINO将yolo预训练模型转成IR格式
OpenVINO设置永久环境变量
windows 系统环境变量里面添加
path 相关环境添加
VS2017配置OpenVINO和OpenCV
包含目录
库目录
附加目录
推理
脚本main.cpp
效果:
执行时遇到的问题
win10的OpenVINO安装
参考:win10 安装OpenVINO并在tensorflow环境下测试官方demo_RayChiu757374816的博客-CSDN博客
使用OpenVINO将yolo预训练模型转成IR格式
参考:win10环境yolov5s预训练模型转onnx然后用openvino生成推理加速模型并测试推理_RayChiu757374816的博客-CSDN博客
OpenVINO设置永久环境变量
官方给的设置环境变量的bat脚本感觉没起作用,如果不设置永久的环境变量则会出现找不到各种动态库的情况。
windows 系统环境变量里面添加
| 变量名 |
变量值 |
| INTEL_OPENVINO_DIR |
C:\Program Files (x86)\IntelSWTools\openvino_2020.4.287 |
| INTEL_CVSDK_DIR |
%INTEL_OPENVINO_DIR% |
| HDDL_INSTALL_DIR |
%INTEL_OPENVINO_DIR%\deployment_tools\inference_engine\external\hddl |
| InferenceEngine_DIR |
%INTEL_OPENVINO_DIR%\deployment_tools\inference_engine\share |
| OpenCV_DIR |
%INTEL_OPENVINO_DIR%\opencv\cmake |
| NGRAPH_DIR |
%INTEL_OPENVINO_DIR%\deployment_tools\ngraph\cmake |
| PYTHONPATH |
%INTEL_OPENVINO_DIR%\python\python3.8 |
注意对应自己的OpenVINO的安装路径和python版本
path 相关环境添加
%HDDL_INSTALL_DIR%\bin
%INTEL_OPENVINO_DIR%\opencv\bin
%INTEL_OPENVINO_DIR%\deployment_tools\ngraph\lib
%INTEL_OPENVINO_DIR%\deployment_tools\inference_engine\external\tbb\bin
%INTEL_OPENVINO_DIR%\deployment_tools\inference_engine\bin\intel64\Release
%INTEL_OPENVINO_DIR%\deployment_tools\inference_engine\bin\intel64\Debug
%INTEL_OPENVINO_DIR%\python\python3.8\openvino\inference_engine
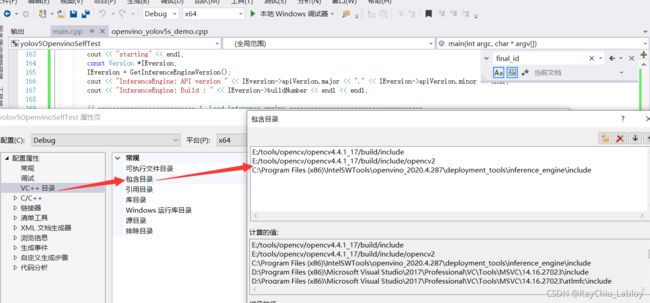
VS2017配置OpenVINO和OpenCV
包含目录
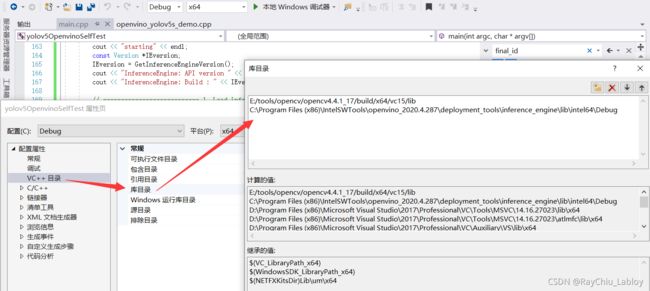
库目录
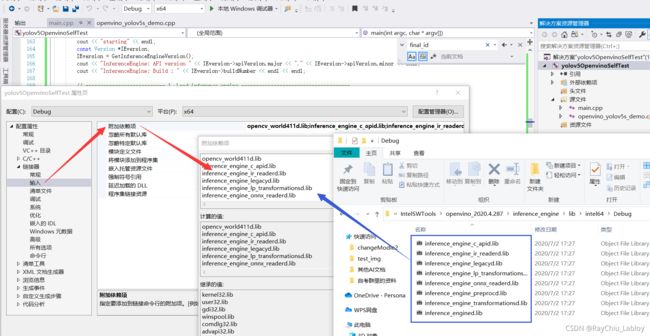
附加目录
推理
脚本main.cpp
只需要对应自己的155-157三行
#include
#include
#include
#include
效果:
执行时遇到的问题
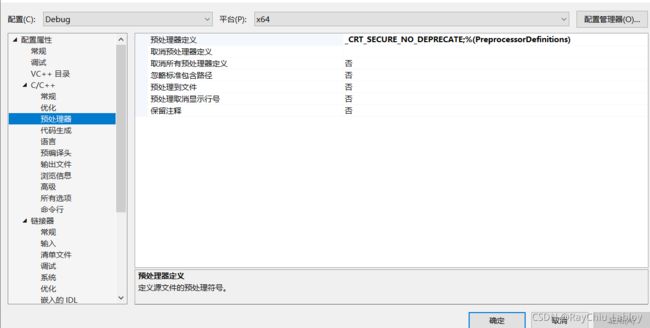
执行报错:错误 C4996 'wcstombs': This function or variable may be unsafe. Consider using wcstombs_s instead. To disable deprecation, use _CRT_SECURE_NO_WARNINGS. See online help for details. yolov5OpenvinoSelfTest c:/program files (x86)/intelswtools/openvino_2020.4.287/deployment_tools/inference_engine/include/ie_unicode.hpp 38
遇到这样的情况就是缺少宏,所以需要我们将需要的宏进行加上就可以了
在以下的位置:项目->属性->配置属性->C/C++ -> 预处理器 -> 预处理器定义,增加_CRT_SECURE_NO_DEPRECATE
参考:GitHub - fb029ed/yolov5_cpp_openvino: 用c++实现了yolov5使用openvino的部署
【如果对您有帮助,交个朋友给个一键三连吧,您的肯定是我博客高质量维护的动力!!!】