【理论】车辆双轴振动模型(二)
编辑:CrazyRabbit
日期:2022年6月30日
本文介绍车辆双轴振动模型,双轴二自由度振动模型是我们分析整车平顺性自由度最少的模型,但能够得出很多重要的结论,对我们直观的理解车辆平顺性,设计、评价整车性能有很重要的指导性。
一、模型化简
在做车辆双轴二自由度模型时,即认同以下模型化简约定:
- 忽略车轮的质量和轮胎的刚度,或者将轮胎刚度与悬架刚度(Wheel Rate)串联为整体刚度(Ride Rate)
- 车轮左右输入完全一致
- 车辆左右完全对称
- 研究的是无阻尼运动,忽略车辆阻尼
- 车身质量按照三个集中质量分解,当质量分配系数为1时, m 2 c m_{2c} m2c为0

最终,模型示意图如上图所示。
二、振型分析
以上图为参考,建立微分方程做振型分析。
根据振动力学相关理论, n n n个自由度有 n n n个广义坐标系,有 n n n个模态和振型。广义坐标系可以任意选取,只要方便处理问题即可,这里我们用两种坐标系建立相应的微分方程,两种坐标系对于理解平顺性各有优点。
2.1 应用 z f 、 z r z_f、z_r zf、zr坐标系
选取 z f 、 z r z_f、z_r zf、zr为广义坐标系,根据图示,应用力学知识,对前后轴取力矩平衡,得以下微分方程:
{ m 2 f z ¨ 2 f + m 2 c b ( z ¨ 2 r a + z ¨ 2 f b ) / L 2 + K f z 2 f = 0 m 2 r z ¨ 2 r + m 2 c a ( z ¨ 2 r a + z ¨ 2 f b ) / L 2 + K r z 2 r = 0 \left\{ \begin{aligned} m_{2f}\ddot{z}_{2f}+m_{2c}b(\ddot{z}_{2r}a+\ddot{z}_{2f}b)/L^2+K_fz_{2f} &=0 \\ m_{2r}\ddot{z}_{2r}+m_{2c}a(\ddot{z}_{2r}a+\ddot{z}_{2f}b)/L^2+K_rz_{2r} &= 0 \end{aligned} \right. {m2fz¨2f+m2cb(z¨2ra+z¨2fb)/L2+Kfz2fm2rz¨2r+m2ca(z¨2ra+z¨2fb)/L2+Krz2r=0=0
应用微分方程理论,求解上述方程,求解出两个模态频率:
Ω 1 , 2 2 = 1 2 ( 1 − β 1 β 2 ) [ ω 0 f 2 + ω 0 r 2 ∓ ( ω 0 f 2 − ω 0 r 2 ) 2 + 4 β 1 β 2 ω 0 f 2 ω 0 r 2 ] \Omega_{1,2}^2=\frac{1}{2(1-\beta_1\beta_2)}[\omega_{0f}^2+\omega_{0r}^2\mp\sqrt{(\omega_{0f}^2-\omega_{0r}^2)^2+4\beta_1\beta_2\omega_{0f}^2\omega_{0r}^2}] Ω1,22=2(1−β1β2)1[ω0f2+ω0r2∓(ω0f2−ω0r2)2+4β1β2ω0f2ω0r2]
其中, ω 0 f \omega_{0f} ω0f和 ω 0 r \omega_{0r} ω0r对应只有 z 0 f z_{0f} z0f或 z 0 r z_{0r} z0r运动时的固有频率:
β 1 = ( 1 − ε ) a L b L + ε a L \beta_1=\frac{(1-\varepsilon)\frac aL}{\frac bL+\varepsilon\frac aL} β1=Lb+εLa(1−ε)La
β 2 = ( 1 − ε ) b L a L + ε b L \beta_2=\frac{(1-\varepsilon)\frac bL}{\frac aL+\varepsilon\frac bL} β2=La+εLb(1−ε)Lb
ω 0 f 2 = K f L 2 m 2 ( ρ y 2 + b 2 ) \omega_{0f}^2=\frac{K_f L^2}{m_2(\rho_y^2+b^2)} ω0f2=m2(ρy2+b2)KfL2
ω 0 r 2 = K r L 2 m 2 ( ρ y 2 + a 2 ) \omega_{0r}^2=\frac{K_r L^2}{m_2(\rho_y^2+a^2)} ω0r2=m2(ρy2+a2)KrL2
对应的两个主频率,有两个振型(如下图):一个振型的振动中心在轴距内,称为角振动(Pitch-俯仰),其频率可以称为 Ω φ \Omega_{\varphi} Ωφ;一个振型的振动中心在轴距之外,称为**垂直振动(Bounce-跳动),**其频率可以称为 Ω z \Omega_z Ωz。

人对水平方向的振动比垂直方向的振动更敏感,俯仰的角振动会产生水平方向较大的分量,所以车辆的平顺性设计和调校要尽量减少俯仰角振动。
在底盘调校初期(匹配弹簧刚度,调整减振器之前),调校工程师经常做的一件事是将减振器内的阀系拆除,或者倒掉大部分减振器油液,制作“无阻尼”减振器。驾驶这样的车辆行驶波形路面,来感受车辆的振动,特别是感受车辆是否有明显的角振动。其原理就在这里。
上述介绍了两个主频率的计算公式,但是没有振动中心距离的计算公式,我们可以直接选取 φ 、 z c \varphi、z_c φ、zc作为广义坐标系,更方便推导振动中心的公式。
2.2 应用 φ 、 z c \varphi、z_c φ、zc坐标系
如上所述,我们可以直接选取俯仰角 φ \varphi φ和质心 z c z_c zc作为坐标系,用 z c / φ z_c/\varphi zc/φ可以方便的求出振动中心距离: z c / φ z_c/\varphi zc/φ为正时,振动中心在质心前,距离 x = z c / φ x=z_c/\varphi x=zc/φ;同理, z c / φ z_c/\varphi zc/φ为负时,振动中心在重心后,距离 x = z c / φ x=z_c/\varphi x=zc/φ。
同理建立微分方程,建立过程略,得出以下公式:
{ z c ¨ + α z c + β φ = 0 φ ¨ + β z c / ρ y 2 + γ φ = 0 \left\{ \begin{aligned} \ddot{z_c}+\alpha z_c+\beta \varphi &=0 \\ \ddot{\varphi}+\beta z_c/\rho_y^2 +\gamma\varphi &= 0 \end{aligned} \right. {zc¨+αzc+βφφ¨+βzc/ρy2+γφ=0=0
式中,
α = ( K f + K r ) / m 2 β = ( K r b − K f a ) / m 2 γ = ( K f a 2 + K r b 2 ) / m 2 ρ y 2 ρ y = I y / m 2 \begin{aligned} \alpha &= (K_f+K_r)/m_2 \\ \beta &= (K_rb-K_fa)/m_2 \\ \gamma &= (K_fa^2+K_rb^2)/m_2 \rho_y^2 \\ \rho_y &=\sqrt{I_y/m_2} \end{aligned} αβγρy=(Kf+Kr)/m2=(Krb−Kfa)/m2=(Kfa2+Krb2)/m2ρy2=Iy/m2
应用微分方程理论,求解上述方程,求解出两个模态频率:
Ω 1 , 2 = α + γ 2 ± ( α − γ ) 2 / 4 + β 2 / ρ y 2 \Omega_{1,2}=\sqrt{\frac{\alpha+\gamma}{2}\pm\sqrt{(\alpha-\gamma)^2/4+\beta^2/\rho_y^2}} Ω1,2=2α+γ±(α−γ)2/4+β2/ρy2
同时,求出振动中心距离的公式:
x = z c / φ = − β α − Ω 2 = − ρ y 2 ( γ − Ω 2 ) β x=z_c/\varphi=\frac{-\beta}{\alpha-\Omega^2}=\frac{-\rho_y^2(\gamma-\Omega^2)}{\beta} x=zc/φ=α−Ω2−β=β−ρy2(γ−Ω2)
如果你看赵六奇翻译的Gillespie的《车辆动力学基础》,你会发现上述公式书中有误,把除号漏掉了。
三、悬架偏频及其设定
而在通常设计过程中,工程师一般以偏频作为设计、测试的参考指标,偏频的计算要比上述的模态频率计算简单的多,且差异很小,所以用起来比较方便。
偏频指的是前后悬架单独跳动时的固有频率,公式如下:
f f = 1 2 π K f m 2 f f r = 1 2 π K r m 2 r f_f=\frac 1 {2\pi} \sqrt{\frac{K_f}{m_{2f}}} \\ f_r=\frac 1 {2\pi} \sqrt{\frac{K_r}{m_{2r}}} ff=2π1m2fKffr=2π1m2rKr
将运动中心的位置和前后偏频的比作图如下:
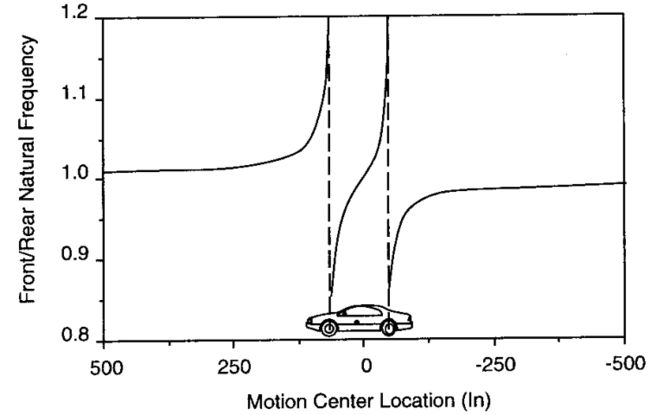
可以看出
- 当两个频率相等时,一个中心在重心位置,另一个在无穷远处;相等的频率对应垂直和俯仰模态解耦,从而产生纯跳动与俯仰运动
- 对于较高的前悬架偏频,其运动是由前轴前面跳动(Bounce)中心和接近后轴俯仰(Pitch)中心的耦合振动
- 对于较低的前悬架偏频,使得跳动(Bounce)中心移至后轴滞后,并将俯仰(Pitch)中心前移至前轴附近
20世纪30年代的Maurice-Olley发现,后一种情况是乘坐舒适性较好的设计。
Maurice-Olley是现代车辆动力学创始人之一。
四、Olley准则
Maurice-Olley在20世纪30年代通过改装能调整俯仰惯性矩的汽车(“k2”试验车)得到一系列的平顺性设计准则,用于指导平顺性设计,称之为“欧雷准则”:
- 前悬架的刚度应比后悬架的低30%,或弹性中心应在重心后6.5%
- 俯仰与跳动频率应彼此接近:跳动频率应比俯仰频率低1.2倍,比率较高时,由于两种运动重叠可能产生“干扰冲击”
- 前后频率均不应超过1.3Hz
- 侧倾频率应大致与俯仰及跳动频率相等
个人认为,以上的Olley准则的方向性指导意义还是有的,但是具体的数值对于现代的设计已经不是很合适了。距离Olley提出这些准则,汽车已经发展100年了,特别是现代汽车的质量分布与当年有了很大的变化。
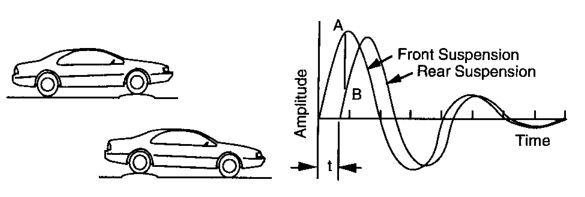
对于偏频设计中的“偏频比大于1”(即Olley准则的第一条),可以有以下直观解释。
首先人体对于纵向的加速度要更敏感,所以对于车辆的跳动要比俯仰运动更容易接受。
当前轮通过一个凸起后开始振动,后轮需要一定时间(时间=轴距/车速)才能振动,设置较高的后悬架频率会使得后悬架的振动波形“追上”前悬架的振动波形,更容易产生跳动运动。
如下图所示:
参考资料
【1】Fundamentals of Vehicle Dynamics——Thomas D. Gillespie
【2】汽车理论——余志生