OpenCV+aruco 生成标定格与相机位姿计算
仅用于记录自己使用aruco过程中遇到的问题与解决方法。
0. 参考资料
github一个参考:https://github.com/opencv/opencv_contrib/blob/master/modules/aruco/samples/create_board.cpp
opencv aruco教程(但有问题):https://docs.opencv.org/4.5.3/db/da9/tutorial_aruco_board_detection.html
opencv docs:https://docs.opencv.org/3.2.0/d9/d6a/group__aruco.html#gaa871fca5f7f75f0e94deba8c417a296e
1. 编译aruco库
需要下载opencv对应的contrib模块,然后编译opencv时指定extra module。可以把其他不相关的module直接在contrib中删除。
编译后,将libaruco.so等复制到对应的路径。
代码编译时,CMakeLists.txt需link到libaruco,原始的${OpenCV_LIBS}没有包含这个库。
2. 生成Grid
aruco可以检测单独的mark,也可以检测一个阵列,进行相机标定或更精确的相机定位。所以需要首先生成Grid。所采用的代码如下:
#include 说明:
dictionary指mark的形式,对应4X4_100表示用内部长宽为4x4的mark,100为这个字典的大小是100,即从0-99。如果生成的阵列超过100,可以选用250/1000这种。
Board是mark构成的一个板子,不要求必须是标注的阵列形式,指定每个mark的坐标即可生成一个board。但一般采用阵列形式。
GridBoard是便捷生成一个阵列,在create时有六个参数如下:
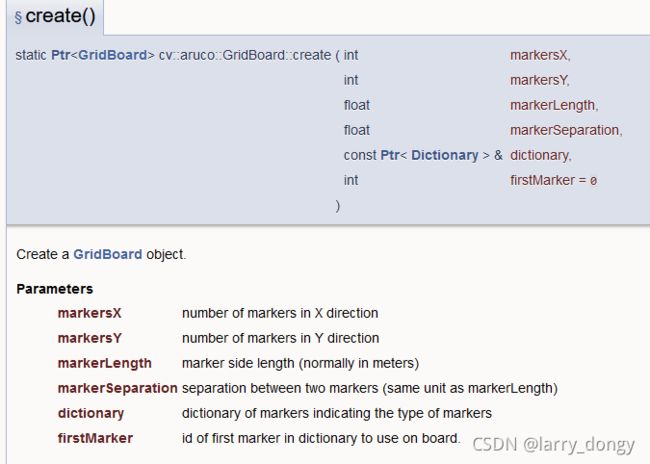 需要注意虽然给定了
需要注意虽然给定了markerLength,但这个数值基本没有用。只需要保证length和separation的比例即可。
最后的firstMarker为整个grid的起始的id是多少,比如设置为5,那么就是5-75。
之后需要进行绘制draw(),参数如下:
 首先指定图片的size,之后
首先指定图片的size,之后margin是最小的marker需要多少个像素。如果最小值*阵列的长宽超过了图片的size,运行会报错。
但这里图片的size如果远大于设定的最小margin,会自动缩放grid的大小,并放在图片中间。所以之前的markerLength并没有什么用。
3. 检测与相机定位
#include 检测时,传入一张图片,采用detectMarkers函数。函数需要传入图像、对应的dictionary是什么样的,输出检测到的marker交点,和对应marker的id。需要注意,这里的dictionary对应的marker的大小,应该是打印出来的实际尺寸,并非生成时指定的理论值。
检测后,能够获取所有marker的角点和id。之后进一步通过检测到的角点确定相机的位姿estimatePoseBoard,此时需要知道之前给定的dictionary的markder大小,以及相机的内参和畸变。
也可以再画出来坐标轴drawAxis。需要注意,Board的原点定义为“最左下角的marker”,z向相机方向。所以在标定时需要保证marker的原点一直在左下角。和marker的id没有任何卵关系。
A Board of marker has a single world coordinate system which is defined by the board layout. The coordinate system in a Grid Board is positioned in the board plane, centered in the bottom left corner of the board and with the Z pointing out
小结
一天的时间基本搞清楚了这个aruco。网上的资料真的乱七八糟,还是自己瞎凑多试整的明白。