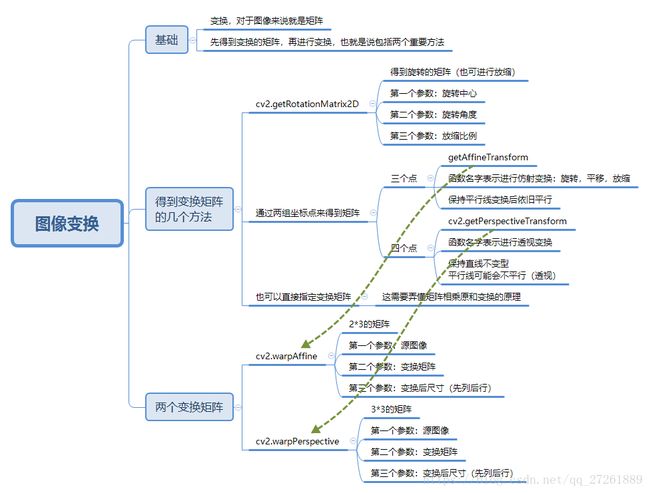
python-opencv 图像变换(缩放变换,平移变换,旋转变换,仿射变换,透视变换)
# usr/bin/env python
# coding: utf-8
##################### 对图像进行变换(旋转)
# 2018年6月17日07:33:54
import cv2
import numpy as np
# 这里说一下旋转的opencv中为旋转提供的三个要素
# 旋转的中心点(center)
# 旋转角度()
# 旋转后进行放缩
# 我们可以通过cv2.getRotationMatrix2D函数得到转换矩阵
img = cv2.imread('cat.jpg')
rows,cols,_ = img.shape
matrix = cv2.getRotationMatrix2D((cols/2,rows/2),90,1)
# 得到变换的矩阵,通过这个矩阵再利用warpAffine来进行变换
# 第一个参数就是旋转中心,元组的形式,这里设置成相片中心
# 第二个参数90,是旋转的角度
# 第三个参数1,表示放缩的系数,1表示保持原图大小
img1 = cv2.warpAffine(img,matrix,(cols,rows))
cv2.imshow('img',img)
cv2.imshow('img1',img1)
##################### 对图像进行变换(三点得到一个变换矩阵)
# 我们知道三点确定一个平面,我们也可以通过确定三个点的关系来得到转换矩阵
# 然后再通过warpAffine来进行变换
img = cv2.imread('dog.jpg')
rows,cols,_ = img.shape
points1 = np.float32([[50,50],[200,50],[50,200]])
points2 = np.float32([[10,100],[200,50],[100,250]])
matrix = cv2.getAffineTransform(points1,points2)
output = cv2.warpAffine(img,matrix,(cols,rows))
cv2.imshow('input',img)
cv2.imshow('output',output)
##################### 对图像进行变换(四点得到一个变换矩阵)
# 进行透视变换
# 可以先用四个点来确定一个3*3的变换矩阵(cv2.getPerspectiveTransform)
# 然后通过cv2.warpPerspective和上述矩阵对图像进行变换
img = cv2.imread('cat.jpg')
rows,cols,_ = img.shape
points1 = np.float32([[56,65],[368,52],[28,387],[389,390]])
points2 = np.float32([[0,0],[300,0],[0,300],[300,300]])
matrix = cv2.getPerspectiveTransform(points1,points2)
# 将四个点组成的平面转换成另四个点组成的一个平面
output = cv2.warpPerspective(img, matrix, (cols, rows))
# 通过warpPerspective函数来进行变换
cv2.imshow('img',img)
cv2.imshow('output',output)
cv2.waitKey()
cv2.destroyAllWindows()一、缩放变换
缩放就是改变图像的大小,使用cv2.resize()函数。图像的大小可以手动指定,也可以使用缩放比例。cv2.resize()支持多种插值算法,默认使用的是cv2.INTER_LINEAR(不管放大和缩小)。
缩小最适合使用:cv2.INTER_AREA,
放大最适合使用:cv2.INTER_CUBIC (慢) 或 cv2.INTER_LINEAR。
dst = cv2.resize(img,None,fx=2,fy=2,interpolation = cv2.INTER_AREA)
或者
dst = cv2.resize(img,(2*width,2*height),interpolation = cv2.INTER_AREA)在坐标轴中以原点为中心的放大与缩小S倍是指对其x轴方向的横坐标放缩成原坐标的横坐标距离中心点(0,0)的距离的S倍并对其y轴方向的横坐标放缩成原坐标的纵坐标距离原点的距离的S倍。其中若S大于1则表示增大,若小于1则表示缩小。放缩在矩阵中的表示为:
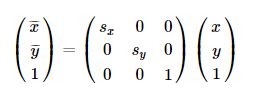
坐标(x,y)在坐标轴中以任意一点的坐标(x0,y0)为中心在水平和垂直方向上放缩S倍,放缩后的坐标为
![]() 用矩阵可以表示为:
用矩阵可以表示为:

二、平移变换
平移是最简单的仿射变换如将空间坐标(x,y)沿着x轴移动100,沿着y轴移动200。平移后的坐标为(x+100,y+200)。将这个过程一般化后,假设任意的空间坐标(x,y)先沿着x轴平移Px再沿着y轴平移Py。得到的坐标为(x+Px,y+Py)。用矩阵表示这个平移过程为:

对于Px和Py若大于0则表示沿着轴正向移动,若小于0则表示沿着轴负向移动。其中,px为x的偏移量,py是y轴的偏移量,单位为像素。
cv2.warpAffine()的第三个参数是输出图像的大小。第二个参数是变换矩阵。第三个参数是
M = np.float32([[1,0,100],[0,1,50]])
dst = cv2.warpAffine(img,M,(cols,rows),boderValue = (255,255,255))cv2.warpAffine(src,M,dsize[,flags[,borderMode[,borderValue ]]])
'''
参数 释义
src 图像矩阵
M 2行3列的仿射变换矩阵
dsize 一个二元元组,输出图像的大小
flags 插值法:INTE_NEAREST、INTE_LINEAR(默认)等
borderMode 填充模式,如:BORDER_CONSTANT等
borderValue 当borderMode=BORDER_CONSTANT时的填充值
'''
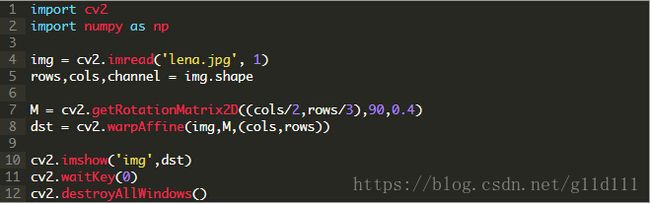
三、旋转变换
在opencv中提供了cv2.getRotationMatrix2D函数获得变换矩阵。第一参数指定旋转圆点;第二个参数指定旋转角度;第二个参数指定缩放比例
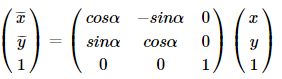
坐标(x,y)绕原点顺时针旋转α(α>0),cosΘ=x/p sinΘ=y/p.其中p代表(x,y)到中心点(0,0)的距离。则
cos(Θ+α)=cosΘcosα-sinΘsinα=(x/p)cosα -(y/p)sinα=Ex/p
sin(Θ+α)=sinΘcosα+cosΘsinα=(y/p)cosα -(y/p)sinα=Ey/p
化解以上公式,使用矩阵表示为:
四、仿射变换
opencv提供了函数cv2.getAffineTransform()来创建一个2*3的矩阵,该矩阵传递给cv2.warpAffine()。该函数语法格式为:
retval = cv.getAffineTransform(src, dst)
'''
src:输入图像的三个点坐标
dst:输出图像的三个点坐标
三个点分别对应左上角、右上角、左下角
'''查看如下放射变换实例:import numpy as np
import cv2 as cv
img = cv.imread(r'Lena.png', 1)
rows, cols, channels = img.shape
p1 = np.float32([[0,0], [cols-1,0], [0,rows-1]])
p2 = np.float32([[0,rows*0.3], [cols*0.8,rows*0.2], [cols*0.15,rows*0.7]])
M = cv.getAffineTransform(p1, p2)
dst = cv.warpAffine(img, M, (cols,rows))
cv.imshow('original', img)
cv.imshow('result', dst)
cv.waitKey(0)
cv.destroyAllWindows()

五、透视变换
参考
上述仿射变换可以将矩形映射成任意平行四边形,各边仍保持平行;而透视变换可以将矩形映射为任意四边形,直线仍保持直线。
由于不再是平行四边形,需提供四个顶点。
透视变换需要3×3的变换矩阵,直线在变换后还是保持直线。为了构造变换矩阵,你需要输入图像的4个点和对应的要输出图像的4个点;要求这4个点其中3个点不共线。使用cv2.getPerspectiveTransform函数构造透视变换矩阵。
透视变换通过函数cv2.getPerspectiveTransform()实现,语法为:
dst = cv2.getPerspectiveTransform(src, M, dsize[, flags[, borderMode[, borderValue]]])
'''
dst:透视后的输出图像,dsize决定输出图像大小
src:输入图像
M:3*3变换矩阵
flags:插值方法,默认为INTER_LINEAR
borderMode:边类型,默认为BORDER_CONSTANT
borderValue:边界值,默认为0
'''透视变换通过函数cv2.getPerspectiveTransform()来生成转换矩阵,需输入输入图像和输出图像的四个顶点的坐标。
import numpy as np
import cv2 as cv
img = cv.imread(r'Lena.png', 1)
rows, cols, channels = img.shape
p1 = np.float32([[0,0], [cols-1,0], [0,rows-1], [rows-1,cols-1]])
p2 = np.float32([[0,rows*0.3], [cols*0.8,rows*0.2], [cols*0.15,rows*0.7], [cols*0.8,rows*0.8]])
M = cv.getPerspectiveTransform(p1,p2)
dst = cv.warpPerspective(img, M, (cols, rows))
cv.imshow('original', img)
cv.imshow('result', dst)
cv.waitKey(0)
cv.destroyAllWindows()

分类: 图像处理, opencv