论文笔记:AutoAugment
第二次Paper Reading,决定读一下自动数据增强领域的开山鼻祖——AutoAugment: Learning Augmentation Policies from Data。本篇解读仅为个人理解,若有错漏,恳请指正。
作者使用到的16种增强操作(图像变换方式)
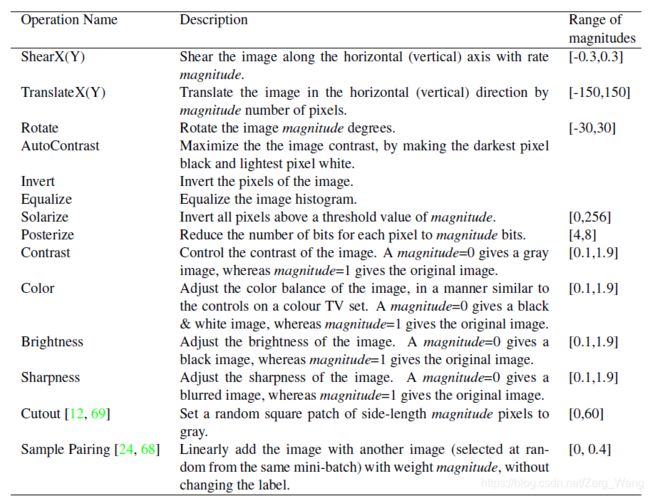
图中,前面14种为Python的PIL库中自带的图像变换操作,Cutout和Sample Pairing为作者额外加入的。
其中,AutoContrast、Invert、Equalize、Solarize、Posterize可以使用PIL中的ImageOps Module来实现,Contrast、Color、Brightness、Sharpness可用ImageEnhance Module来实现。Shear、Translate可用Image Module中的transform类来实现,Rotate就用Image Module的rotate类来实现。
对于其中一些操作解释一下:
首先展示下这张经典的原图:
ShearX、ShearY
分别是对图像沿X或Y轴错切。错切的效果类似于投影。

TranslateX、TranslateY
沿X、Y轴平移图像。
Invert
反色,即像素反转,如图:

Equalize
直方图均衡化。使图像变得:灰度直方图几乎覆盖了整个灰度的取值范围,并且除了个别灰度值的个数较为突出,整个灰度值分布近似于均匀分布)

Solarize
指定一个像素值,对原图中高于该值的像素进行翻转操作,简单来说是一种部分invert操作。
例如翻转像素值128以上的像素:

如果这个值设为0,也就是全部像素翻转,结果和invert就一样了。
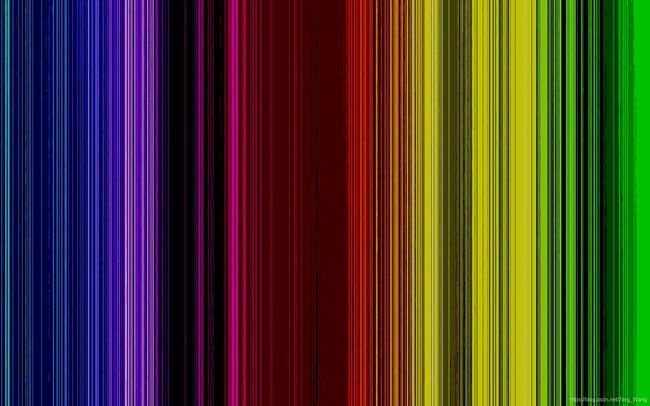
Posterize
色彩分离,色调分离,减少每个颜色通道上的位数(bit)。简单来说就是减少组成图片的色彩的种类,这里拿一张彩色图片举例:
原图:

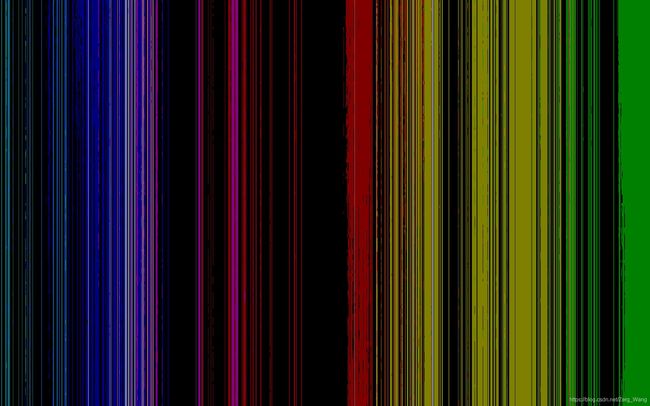
减少到仅有2位:
减少到仅有1位:
Color
调整色彩平衡,简单来说可以理解为调整图像色调和饱和度。
Python代码为:
ImageEnhance.Color(img).enhance(v)以下分别为v=0、0.5、1、1.5处理后的图像:




Sharpness
调整锐度,锐度越高,图像中的物体边缘色彩过渡效果越差,使得物体边缘显得“尖锐”,显得图像很“干”。锐度越低,图像越柔和,但清晰度也会降低。


AutoContrast
自动对比度。设参数为v。首先计算输入图像的直方图,然后将其中最亮的v%的像素和最暗的v%的像素去掉,之后重新映射图像,以便保留的最暗像素变为黑色,即0,最亮的变为白色,即255。
因此,v不能超过50。注意,v=0处理出的图像与原图不同,因为通过了重新的映射,色彩分布会有变化。作者采用的操作即v=0的。
随着v值提高,图像色彩种类越少:(以下分别为v=0,20,40的图像)



Cutout
随机选择图像中的一块区域,屏蔽掉这块区域的图像内容,如图:

Sample Pairing
在训练时从同一批次的图像中选择一张,将其内容嫁接到原图上,但原图标签不变。
数据增强形式
几个定义
增强策略:多个子策略组成一个完整的增强策略。作者的实验中规定了每个完整策略由5个子策略构成。
子策略:由2个上文提到的增强操作组成,其中,每个操作由2个参数组成:probability和magnitude,分别是使用该操作的可能性以及该操作的使用幅度(也就是上文提到的参数v)。不是所有的操作都需要magnitude,比如AutoContrast操作作者就规定其参数为0,但形式上这些操作仍会保留magnitude参数。此外,对于几何变换类的操作(Shear、Translate、Rotate),虽然有magnitude参数规定了操作幅度,但方向是随机的。例如旋转45度,在增强时可能会逆时针旋转45度,也可能顺时针旋转45度。
为了适配作者使用的离散搜索算法,probability和magnitude可能的取值也是离散的。其中probability有0、0.1、0.2……1共11种可能的取值,magnitude有0、1、2……9共10种可能的取值。若算上操作的种类,一个子策略则有6个参数。因此,一个子策略有(16×10×11)^2种不同的形式。
增强流程
和传统数据增强方法不同,AutoAugment针对单个数据集,通过算法找到多个增强策略(在作者的实验中,对于每个数据集,作者找到5个增强策略,共25个子策略),然后在使用数据集训练网络的过程中,针对mini batch中的单张图像,会从这一系列子策略中随机抽取一个子策略作用在该图像上。也就是说,不仅每个epoch喂进网络的数据可能都经过了不同的增强操作。甚至在同一epoch中,同一mini batch中的不同图像也可能经过不同的增强操作。然而,因为有probability的存在,即使使用了相同的子策略来增强,结果也会不同。这里借用Fast AutoAugment论文中的一幅图:
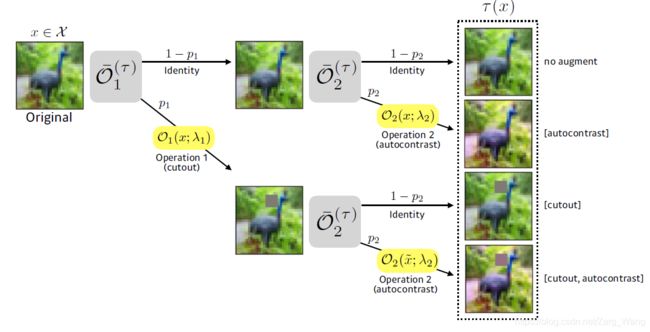
假设该子策略为[ (Cutout, p1, v1), ( AutoContrast, p2, v2) ],则有(1-p1)(1-p2)的概率该图像不会被更改,也有p1p2的概率该图会经过两次增强操作(两次增强操作的顺序不可忽略)。同理可知只做一次增强操作的概率为(1-p1)p2或(1-p2)p1。
策略搜索算法细节
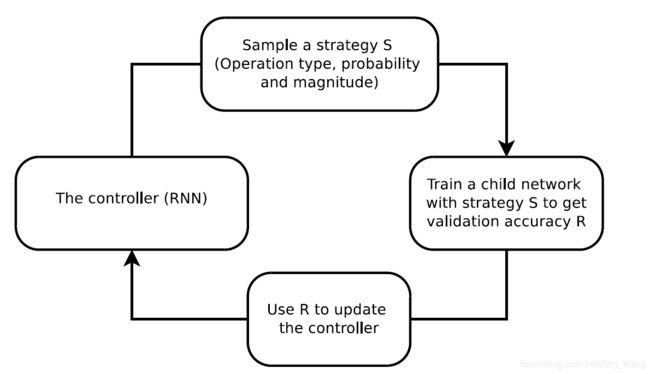
搜索算法的主体为增强学习,由两部分构成:控制器和训练算法。
控制器由RNN(循环神经网络(Recurrent Neural Network)来充当。更详细来说,作者采用的是单层的LSTM(长短期记忆网络,Long ShortTerm Memory Networks)。每一轮的搜索,该网络会通过Softmax预测一个增强策略。因为一个增强策略有30个值(5个子策略,每个子策略2个操作,每个操作包括操作本身、幅度、概率共3个参数,所以5×2×3=30),所以网络设置了30个Softmax的预测值。
接下来,生成的增强策略会应用到子模型的训练中。子模型在训练时,对于每个mini batch中的每一张图像都会从5个子策略中随机选择一个应用(流程和本文前面所述一致)。子模型训练完后会在验证集上进行评估,该子模型的精确度会作为“奖励信号”反馈给RNN控制器。最后,控制器会通过该信号,并在近端策略优化算法(Proximal Policy Optimization algorithm,PPO)下进行更新。
搜索过程中控制器会生成大概15000个增强策略(即进行15000轮左右的迭代),最后会选出最好的5个,组成一个有25个子策略的结果,作为实验数据集“算法”认为最好的增强操作。
近端策略优化算法(Proximal Policy Optimization algorithm,PPO)
控制器是如何在PPO算法下更新的?本文不会详细展开(毕竟我也不会……),这里根据AI研习社的教程(https://www.jianshu.com/p/57c59d580d40),简单讲讲其流程:
首先讲讲策略梯度算法,其简要思想为:在第t步时,策略Pt接受状态St,输出动作概率分布,在动作概率分布中采样动作,执行动作at,得到回报,跳到下一个状态。在这样的步骤下,我们可以使用策略Pt收集一批样本,然后使用梯度下降算法学习这些样本。策略损失函数为:(这里一般采用对数概率)
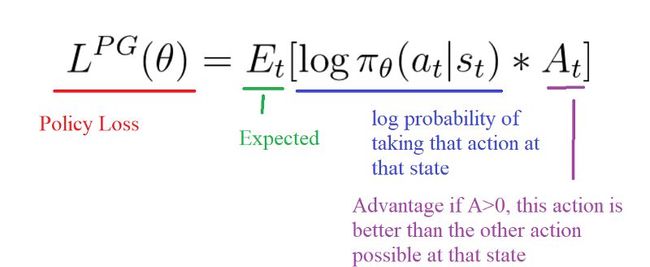
通过梯度下降算法来更新策略,并实现回报一步步提高。对于差的action,在概率分布中其对应概率会下降(之后选中其的可能性更小了,例如在AutoAugment中,较差的子模型,即accuracy低的,之后选中的可能性变小,对应的那组子策略选中的可能性也就变小),较好的action则其概率会上升。
但问题在于,策略梯度算法不好把握步长。面对看似不错或看似较差的action,可能导致该action在动作概率分布中的概率剧烈波动,可能导致之后反复采取一个action,陷入局部最优中。对此,PPO引入“裁剪的替代目标函数”(Clipped surrogate objective function),用当前策略下的行动概率π(a|s)和上一个策略的行动概率 (π_old(a|s))的比例来代替对数概率。该比例大于1,说明当前策略下的行动比原先策略的更有可能发生,若小于1,则当前策略下行动发生的概率低于原先。
新的损失函数为:

但如果当前策略的行动的可能性和之前策略的可能性差距太大的话,其比例也可能过大,进而导致过于剧烈的梯度更新,为此PPO进一步加了限制:
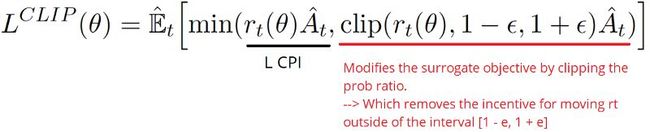
clip裁剪函数规定了这个比例要在[ 1-ε, 1+ε ]之间,若小于该区间取 1-ε,大于取 1+ε。ε为超参数。
效果分析
CIFAR10、CIFAR100
策略搜索细节
作者在实验中发现,AutoAugment对数据集中的样本数量不敏感。作者称,在固定的搜索时间下,让子模型使用更少样本,训练更多回合,效果要比训练回合少但样本数量大的情况好。由此,作者从CIFAR10的50000张图像中抽出4000张,作为“Reduced CIFAR10”作为实验数据集搜索增强策略。搜索使用的子模型为Wide-ResNet-40-2,这是因为每个子模型可以从头训练,从而能计算整个控制器的梯度更新。超参数为:epoch为120,learning rate为0.01,weight decay为0.0001。学习率退火为一个周期的cosine。
效果分析
在Reduced CIFAR10上搜索到的策略,大多为色彩变换,例如Equalize,AutoContrast,Color和Brightness。
利用在Reduced CIFAR10上搜索到的策略,作者在CIFAR10、Reduced CIFAR10以及CIFAR100数据集上进行了训练,结果如图:
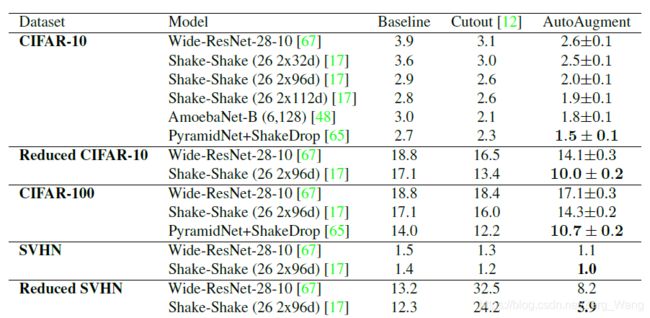
为了和Baseline对比,作者在使用搜索到的增强策略的实验时,具体的增强操作为:先使用Baseline的增强操作,之后应用AutoAugment搜索到的操作,最后应用Cutout。其中,最后使用的Cutout的区域大小为默认的16像素值。但需要注意的是,AutoAugment搜索的操作中,可能也包含Cutout,这个Cutout的区域大小就取决于搜索到的magnitude。(然而实际结果是Cutout没有出现在AutoAugment搜索到的最好的25个子策略中……)
顺便提一下,作者还做了一个比较有意思的实验:将搜索得来的策略中的probability和magnitude的数值随机化,将这个更改过的策略再应用到训练中,发现效果也很好(原策略2.6%,更改后3.0%)。说明AutoAugment搜索出的增强策略有较强的适用性。然后,作者进一步地,不仅将probability和magnitude的数值随机化,操作种类也随机化了,平均结果为3.1%。说明即使是在搜索空间中完全随机地取一个策略出来,效果都比baseline要好,这一方面说明了AutoAugment的增强方式有其优越性,另一方面也说明了AutoAugment搜索算法并非“鸡肋”,在进一步提高正确率上是十分必要的。
SVHN
策略搜索细节
在SVHN上作者同样使用了简化的数据集。作者使用的“Reduced SVHN”含有1000张从core training set中随机抽取的图像。搜索过程中的模型和超参数则与在Reduced CIFAR10上的一致。
效果分析
与从Reduced CIFAR10上搜索到的策略不同,在Reduced SVHN上,最常出现的操作为Invert、Equalize、Shear和Rotate。这也基本符合人们的认知。数字识别的重点在于它们的形状,而不是它们的颜色。此外,几何变换类的操作中,Shear是最多的。这同样说明识别数字时是多角度的,非直视状态下,数字产生“投影”式的变换,与Shear操作契合。
实验中为了与Baseline作对比,作者在使用搜索到的增强策略做实验时,增强操作为:Baseline的操作+AutoAugment搜索到的增强操作。与CIFAR的略有不同,因为作者发现之后再使用Cutout会显著降低精确度。
具体实验结果也在上面的表中,这里不再赘述。
ImageNet
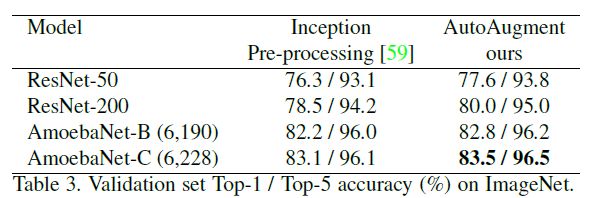
使用由120类共6000张图像构成的“Reduced ImageNet”数据集。搜索所用子模型为Wide-ResNet-40-2,learning rate为0.1,weight decay为10^(-5)。
搜索到的增强策略与CIFAR类似,以色彩变换为主,但略有不同的地方在于ImageNet中Rotate操作较多。
在与baseline的对比中,作者同样使用了baseline的增强操作+Autoaugment搜索到的操作,具体实验结果见下表:
策略迁移
从Reduced ImageNet上搜索得来的增强策略,直接应用到FGVC数据集(细粒度分类数据集,即对属于同一基础类别的图像(如汽车、狗、花、鸟等)进行更加细致的子类划分的数据集)上也有亮眼的表现:
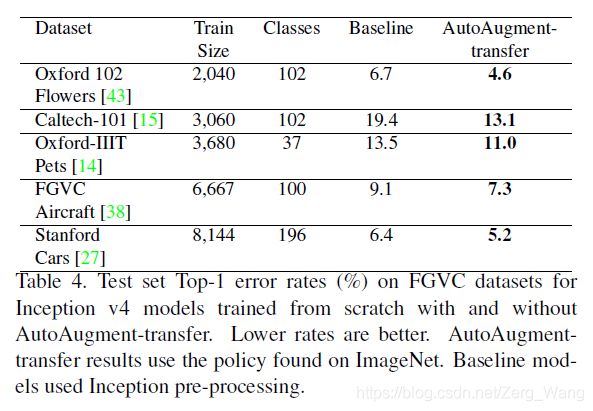
这也说明了AutoAugment的算法所找到的增强操作并没有“overfitting”相应的数据集,相反,这些操作具有更广泛的适用性。
其他
epoch与sub-policy
在搜索和应用增强策略的时候,对于每个mini batch中的每张图像,都是从多个子策略(sub-policy)中随机选择一个来应用的。因为策略的随机应用,模型则需要足够多样的增强操作来保证其泛化能力。因此,搜索时需要运行足够多的epoch,从而令控制器生成足够多的子策略进行择优与验证。
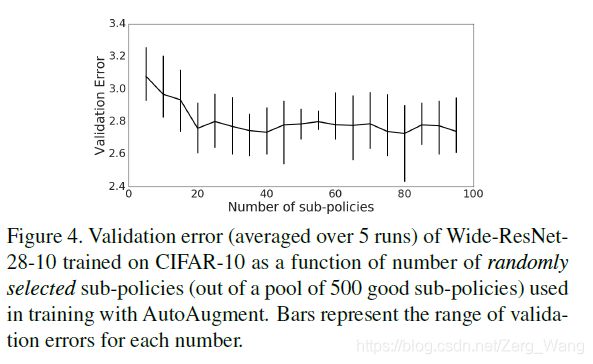
子策略数量与精度的关系
通过搜索找出的策略中,作者只选择了其中最好的5个(共25个子策略)。如果我们将这个数字扩大,将得来的更多子策略用在后面模型的训练中,精度是否会提高呢?作者做了如下实验,结论是:20个左右的子策略已经足够了。
参考资料
https://arxiv.org/abs/1805.09501v3
http://www.tensorinfinity.com/paper_144.html
https://zhuanlan.zhihu.com/p/88525394
https://www.jianshu.com/p/57c59d580d40