Deep Mind 团队论文Playing Atari with Deep Reinforcement Learning复现
笔者使用python tensorflow尝试复现了这篇论文中的dqn算法,玩Atari Breakout打砖头游戏,使得dqn能够最好可以打掉10块砖。由于硬件限制,同时本职工作忙碌,没有进一步优化,这里给出源码和一些可能的优化方向,欢迎讨论研究。
Atari环境配置
目前gym中已经移除了Atari环境,需要自己下载配置。这里会遇到一些报错,都是由于缺少一些相关的包或者dll。百度搜索报的错都能够找到解决办法,中文网站找不到可以Bing搜索,在GitHub或者Stackoverflow上找。
DQN算法

DQN基于Qlearning发展而来,核心是一张Q表,在不同的状态下,选择能获得Q值最大的动作,并根据环境反馈,依照算法对Q表进行更新。
若环境过于复杂,使用真实的二维表格包含所有状态,表格会非常大,Q值得查找将不现实。神经网络有强大得拟合能力,通过神经网络拟合Q表,实现状态到Q值的对应关系。进一步的,若状态是图片,则通过CNN进行处理,这个CNN也就体现了DQN中的Deep。
针对Atari Breakout这个游戏,一个state是由4帧游戏画面组合在一起的三维张量,每一帧画面的分辨率是84*84,所以一个state是84*84*4的张量。
stateInput = tf.placeholder("float", [None, 84, 84, 4]) # None表示minibatch有若干个stateCNN包括三层,第一层是32个8*8*4的卷积核,对卷积核维度的理解见笔者这篇博客。
W_conv1 = self.weight_variable([8, 8, 4, 32])第二层、第三层卷积核如下
W_conv1 = self.weight_variable([8, 8, 4, 32])
b_conv1 = self.bias_variable([32])
W_conv2 = self.weight_variable([4, 4, 32, 64])
b_conv2 = self.bias_variable([64])
W_conv3 = self.weight_variable([3, 3, 64, 64])
b_conv3 = self.bias_variable([64])
W_fc1 = self.weight_variable([3136, 512])
b_fc1 = self.bias_variable([512])把卷积后的结果reshape,输入到全连接层,全连接层激活函数为relu,输出层不用激活函数直接输出Q值。
h_conv3_flat = tf.reshape(h_conv3, [-1, 3136])
h_fc1 = tf.nn.relu(tf.matmul(h_conv3_flat, W_fc1) + b_fc1)
# Q Value layer
QValue = tf.matmul(h_fc1, W_fc2) + b_fc2网络的损失函数按照下面的方法构建
q_eval = self.sess.run(self.QValue, feed_dict={self.stateInput: state_batch})
q_target = q_eval.copy()
q_next = self.sess.run(self.QValueT, feed_dict={self.stateInputT: nextState_batch})
for i in range(0, self.batchsize):
if terminal[i]:
q_target[i, action_batch[i]] = reward_batch[i]
else:
q_target[i, action_batch[i]] = reward_batch[i] + self.gamma * np.max(q_next[i])q_eval是minibatch中记忆(s, a, r, s_)s所在Q表的那一行的所有动作的Q值,q_next是state next对应的所有动作的Q值,根据执行了哪一个动作,对应更新q_next的中的Q值,跟新后的q_next即为q_target,训练神经网络,使q_eval趋近q_target。这里有一个trick,构建损失函数的,不能只选执行的动作,没执行的动作对应的Q值也要考虑进来。考虑下图这样的情况
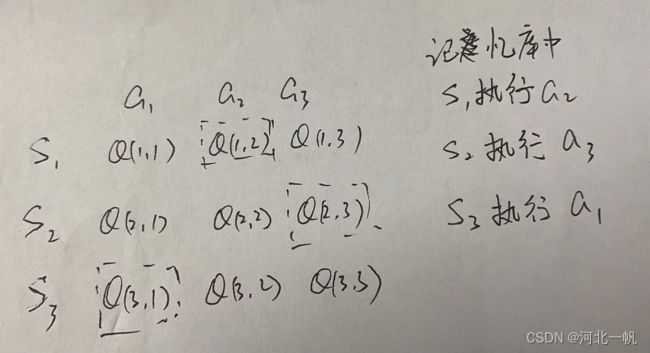
q_target和q_eval都是3*3的张量,q_target - q_eval 在没执行的动作,即Q(1, 1) Q(1, 3) 等等位置是0,这样在训练时,没执行的动作的Q值不会受影响。
如果q_target和q_eval使用3*1的张量,那么在网络训练时,没执行的动作对应的Q值也会发生改变,不利于网络收敛。
另外注意在终止状态只有r,没有max(q_next)。
完整代码包括dqn.py和main.py两个文件
import tensorflow.compat.v1 as tf
tf.disable_v2_behavior()
# import tensorflow as tf
import cv2
import numpy as np
import random
class DeepQNetwork:
def __init__(self, action_dim=3):
self.action_dim = action_dim
self.start_learn = False
self.ret_index = 0
self.initial_index = 0
self.memory = []
self.memory_size = 10000
self.batchsize = 32
# init Q network
self.stateInput, self.QValue, self.W_conv1, self.b_conv1, self.W_conv2, self.b_conv2, self.W_conv3, self.b_conv3, self.W_fc1, self.b_fc1, self.W_fc2, self.b_fc2 = self.createQNetwork()
# init Target Q Network
self.stateInputT, self.QValueT, self.W_conv1T, self.b_conv1T, self.W_conv2T, self.b_conv2T, self.W_conv3T, self.b_conv3T, self.W_fc1T, self.b_fc1T, self.W_fc2T, self.b_fc2T = self.createQNetwork()
self.copyTargetQNetworkOperation = [self.W_conv1T.assign(self.W_conv1),self.b_conv1T.assign(self.b_conv1),self.W_conv2T.assign(self.W_conv2),self.b_conv2T.assign(self.b_conv2),self.W_conv3T.assign(self.W_conv3),self.b_conv3T.assign(self.b_conv3),self.W_fc1T.assign(self.W_fc1),self.b_fc1T.assign(self.b_fc1),self.W_fc2T.assign(self.W_fc2),self.b_fc2T.assign(self.b_fc2)]
self.createTrainingMethod()
self.sess = tf.Session()
self.sess.run(tf.global_variables_initializer())
self.gamma = 0.9
self.timeStep = 0
def set_initial_state(self, observation):
observation = cv2.cvtColor(cv2.resize(observation, (84, 110)), cv2.COLOR_BGR2GRAY)
observation = observation[26:110, :]
ret, observation = cv2.threshold(observation, 1, 255, cv2.THRESH_BINARY)
ret = np.reshape(observation, (84, 84))
self.s = np.zeros((84, 84, 4))
self.s_ = np.zeros((84, 84, 4))
self.s[:, :, 0] = ret
def story_memory(self, observation, a=0, r=0, terminal=False):
# convert to binary
observation = cv2.cvtColor(cv2.resize(observation, (84, 110)), cv2.COLOR_BGR2GRAY)
observation = observation[26:110, :]
ret, observation = cv2.threshold(observation, 1, 255, cv2.THRESH_BINARY)
ret = np.reshape(observation, (84, 84))
self.s_[:, :, 3] = self.s[:, :, 2].copy()
self.s_[:, :, 2] = self.s[:, :, 1].copy()
self.s_[:, :, 1] = self.s[:, :, 0].copy()
self.s_[:, :, 0] = ret
self.memory.append([self.s.copy(), a, r, self.s_.copy(), terminal])
self.s = self.s_.copy()
if len(self.memory) > self.memory_size:
self.memory.pop(0)
self.start_learn = True
def createQNetwork(self):
# network weights
W_conv1 = self.weight_variable([8, 8, 4, 32])
b_conv1 = self.bias_variable([32])
W_conv2 = self.weight_variable([4, 4, 32, 64])
b_conv2 = self.bias_variable([64])
W_conv3 = self.weight_variable([3, 3, 64, 64])
b_conv3 = self.bias_variable([64])
W_fc1 = self.weight_variable([3136, 512])
b_fc1 = self.bias_variable([512])
W_fc2 = self.weight_variable([512, self.action_dim])
b_fc2 = self.bias_variable([self.action_dim])
# input layer
stateInput = tf.placeholder("float", [None, 84, 84, 4])
# hidden layers
h_conv1 = tf.nn.relu(self.conv2d(stateInput, W_conv1, 4) + b_conv1)
# h_pool1 = self.max_pool_2x2(h_conv1)
h_conv2 = tf.nn.relu(self.conv2d(h_conv1, W_conv2, 2) + b_conv2)
h_conv3 = tf.nn.relu(self.conv2d(h_conv2, W_conv3, 1) + b_conv3)
h_conv3_shape = h_conv3.get_shape().as_list()
print("dimension:", h_conv3_shape[1] * h_conv3_shape[2] * h_conv3_shape[3])
h_conv3_flat = tf.reshape(h_conv3, [-1, 3136])
h_fc1 = tf.nn.relu(tf.matmul(h_conv3_flat, W_fc1) + b_fc1)
# Q Value layer
QValue = tf.matmul(h_fc1, W_fc2) + b_fc2
return stateInput, QValue, W_conv1, b_conv1, W_conv2, b_conv2, W_conv3, b_conv3, W_fc1, b_fc1, W_fc2, b_fc2
def copyTargetQNetwork(self):
self.sess.run(self.copyTargetQNetworkOperation)
def createTrainingMethod(self):
self.yInput = tf.placeholder("float", [None, self.action_dim])
self.cost = tf.reduce_mean(tf.squared_difference(self.yInput, self.QValue))
self.trainStep = tf.train.RMSPropOptimizer(0.00025, 0.99, 0.0, 1e-6).minimize(self.cost)
def learn(self):
minibatch = random.sample(self.memory, self.batchsize)
state_batch = np.array([data[0] for data in minibatch])
action_batch = [data[1] for data in minibatch]
reward_batch = np.array([data[2] for data in minibatch])
nextState_batch = np.array([data[3] for data in minibatch])
terminal = np.array([data[4] for data in minibatch])
q_eval = self.sess.run(self.QValue, feed_dict={self.stateInput: state_batch})
q_target = q_eval.copy()
q_next = self.sess.run(self.QValueT, feed_dict={self.stateInputT: nextState_batch})
for i in range(0, self.batchsize):
if terminal[i]:
q_target[i, action_batch[i]] = reward_batch[i]
else:
q_target[i, action_batch[i]] = reward_batch[i] + self.gamma * np.max(q_next[i])
self.sess.run(self.trainStep, feed_dict={
self.yInput: q_target,
self.stateInput: state_batch
})
# # save network every 100000 iteration
# if self.timeStep % 10000 == 0:
# self.saver.save(self.session, 'saved_networks/' + 'network' + '-dqn', global_step=self.timeStep)
if self.timeStep % 1000 == 0:
self.copyTargetQNetwork()
self.timeStep += 1
def choose_action(self):
if len(self.memory) < self.memory_size:
return random.randint(0, 2)
else:
ss = self.s[np.newaxis, :, :, :]
actions_values = self.sess.run(self.QValue, feed_dict={self.stateInput: ss})
action = np.argmax(actions_values) if random.randint(0, 10) < 9 else random.randint(0, 2)
return action
def weight_variable(self, shape):
initial = tf.truncated_normal(shape, stddev=0.01)
return tf.Variable(initial)
def bias_variable(self, shape):
initial = tf.constant(0.01, shape=shape)
return tf.Variable(initial)
def conv2d(self, x, W, stride):
return tf.nn.conv2d(x, W, strides=[1, stride, stride, 1], padding="VALID")
def max_pool_2x2(self, x):
return tf.nn.max_pool(x, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding="SAME")
import gym
import time
import random
from dqn import *
rl = DeepQNetwork()
env = gym.make("Breakout-v4")
episodes = 1000000
env_action_list = [3, 0, 2]
# for i_episode in range(episodes):
while True:
# 开始游戏
env.reset()
observation, reward, done, info = env.step(1)
env.render()
rl.set_initial_state(observation)
game_over = False
lives0 = info["ale.lives"]
while True:
action = rl.choose_action()
action_env = env_action_list[action]
# action = int(input("请输入动作"))
observation_, reward, done, info = env.step(action_env)
env.render()
# print(reward, done, info)
lives = info["ale.lives"]
if lives < lives0:
done = True
reward = -10
rl.story_memory(observation_, action, reward, done)
if rl.start_learn:
rl.learn()
if done:
break
一些改进方向
我的记忆库只存了10000条记忆,有点太少了,记忆库如果能达到100万,训练效果会更好,但是笔者如果把记忆库设置为10万条就报错了,原因还没来得及研究。
在设置状态的时候,是否可以不考虑砖的分布,即把上半部分画面裁掉,使DQN仅关注小球的位置,优先保证接到小球,至于小球能不能打到砖块就先随缘。只要不死,总有打到砖头的机会。