线性代数的几何实质
Part 0
摘要:由于学业的专注点原因,许多人对线性代数的理解尚停留在代数计算方面,而并不能理解一些定义和法则是从何而来以及线性代数的本源意义。在此意义上,本文不失为一个较直观的线代入门。
Part 1 线性空间的概念
1.1 向量的实质
首先搬出一般的定义:同时具有大小与方向的量。但对于oiers来说,事实上m维向量就是具有m个元素的列表,例如stl中就把动态数组作为vector(向量)。线性代数中,常常把向量的起点认为是原点,而终点就可以唯一地表示一个向量。
在第一种意义上,向量指导了在空间中的运动。向量 α = ( a 1 , . . . , a n ) \alpha=(a_1,...,a_n) α=(a1,...,an)表示分别向第i个坐标轴上移动 a i a_i ai的长度。两个向量的相加运算就是先后执行两个运动,显然有 ( α + β ) i = α i + β i (\alpha+\beta)_i=\alpha_i+\beta_i (α+β)i=αi+βi。以此为基础理解数乘,即得 ( k α ) i = k α i (k\alpha)_i=k\alpha_i (kα)i=kαi。
在第二种意义上,n维向量是用n个独立元素来确定一件事物。例如我们只关心一本书的页码和价格,就可以向量用 ( p a g e s , p r i c e s ) (pages,prices) (pages,prices)来表示这本书。向量的加法和数乘就是多个书的叠加。
数学上,我们会折合两种说法。例如,函数就是一个隐藏的向量。函数的加法就是把每个点对应的两个函数值相加,数乘就是每一个点对应的函数值与该数相乘,这对应 ( f ( x 1 ) , f ( x 2 ) , . . . ) + ( g ( x 1 ) , g ( x 2 ) , . . . ) (f(x_1),f(x_2),...)+(g(x_1),g(x_2),...) (f(x1),f(x2),...)+(g(x1),g(x2),...)和 k ( f ( x 1 ) , f ( x 2 ) , . . . ) = ( k f ( x 1 ) , k f ( x 2 ) , . . . ) k(f(x_1),f(x_2),...)=(kf(x_1),kf(x_2),...) k(f(x1),f(x2),...)=(kf(x1),kf(x2),...),对于函数的变换,甚至可以求特征向量 F f ( x ) = λ f ( x ) Ff(x)=\lambda f(x) Ff(x)=λf(x)(后文会讲到)。只不过感觉有无穷多个元素,即无穷维向量。
鉴于线性变换的意义,规定只要满足相加和数乘意义的量就是向量。
这里的“相加和数乘意义”具体指如下八条法则:
若集合V中,有:
- α + β = β + α \alpha+\beta=\beta+\alpha α+β=β+α
- α + ( β + γ ) = ( α + β ) + γ \alpha+(\beta+\gamma)=(\alpha+\beta)+\gamma α+(β+γ)=(α+β)+γ
- 存在唯一的 0 ∈ V 0\in V 0∈V,使对于任何 α ∈ V \alpha\in V α∈V有 α + 0 = α \alpha+0=\alpha α+0=α
- 存在唯一的 β ∈ V \beta\in V β∈V,使 α + β = 0 \alpha+\beta=0 α+β=0
- 1 α = α 1\alpha=\alpha 1α=α
- k ( p α ) = ( k p ) α k(p\alpha)=(kp)\alpha k(pα)=(kp)α
- ( k + p ) α = k α + p α (k+p)\alpha=k\alpha+p\alpha (k+p)α=kα+pα
- k ( α + β ) = k α + k β k(\alpha+\beta)=k\alpha+k\beta k(α+β)=kα+kβ
则称V为线性空间或向量空间,V中元素称为向量。容易验证,数列、矢量、函数都满足这些要求。
1.2 线性组合、张成的空间与基向量
线性组合:若干个向量 α i \alpha_i αi,对于任何一组数 a i a_i ai,称 a 1 α 1 + a 2 α 2 + . . . + a m α m a_1\alpha_1+a_2\alpha_2+...+a_m\alpha_m a1α1+a2α2+...+amαm为它们的线性组合。通过几个以原点为起点的向量的线性组合,能够到达的所有区域称为它们张成的空间。
线性无关:若干个向量不能用彼此的线性组合表示出,则称它们线性无关。
在n维空间中,有一组特别的向量,它们是每个坐标轴上的单位向量。即 i = ( 1 , 0 , 0 , 0 , . . . ) , j = ( 0 , 1 , 0 , 0 , . . . ) , k = ( 0 , 0 , 1 , 0 , . . . ) i=(1,0,0,0,...),j=(0,1,0,0,...),k=(0,0,1,0,...) i=(1,0,0,0,...),j=(0,1,0,0,...),k=(0,0,1,0,...)等等。通过向量加法的定义,我们可以知道它们可以张成整个n维空间,也就是说,能够通过线性组合表示出任意n维线性空间的向量。这一组特别的向量称为标准正交基,它们是长度为1、互相垂直的向量。
但是可以发现,事实上任意n个线性无关的向量都能够张成全空间。如果以它们作为单位向量,显然可以构建出一个网格,我们在这个线性空间内把向量的每个值理解为在每个“单位向量”所在坐标轴上的投影。但如果线性相关,则有一个“单位向量”显然会和剩余n-1个共n-1维平面(这一点很显然,请自行思考)。这样就只能张成小于n维的空间了。
n维空间这组线性无关的向量称为它的一组基或基向量。
Part 2 矩阵的本质与线性变换
“变换”一词其实就是“函数”的花哨写法。它接受一个输入向量,并给出一个输出向量。在变换中,有一类是比较容易理解且用处较多的,它们被叫做线性变换。何谓“线性”?即满足任何一条直线变换后仍是直线、原点位置不变的变换。换句话说,满足坐标网格变换后平行且等距。
那么我们究竟如何用数值来表示这一变换呢?事实上,由于线性变换的性质,我们只需要考虑基向量是如何变换的。以二维空间为例,在输入空间里,基是 ( 1 , 0 ) (1,0) (1,0)和 ( 0 , 1 ) (0,1) (0,1),但输出空间中,基可能变成了 ( 0 , 1 ) (0,1) (0,1)和 ( − 1 , 0 ) (-1,0) (−1,0)(注:这是逆时针旋转90°的操作)。由于网格线平行等距,变换前的线性组合仍然成立。也就是说向量 ( a , b ) = a ( 1 , 0 ) + b ( 0 , 1 ) (a,b)=a(1,0)+b(0,1) (a,b)=a(1,0)+b(0,1),在新的空间中便是 a ( 0 , 1 ) + b ( − 1 , 0 ) = ( − b , a ) a(0,1)+b(-1,0)=(-b,a) a(0,1)+b(−1,0)=(−b,a)。我们记录变换后的基向量的位置,把他们从左到右写一遍,凑成一个方阵 ( 0 − 1 1 0 ) \begin{pmatrix}0&-1\\1&0\end{pmatrix} (01−10),则这个线性变换可以唯一地用这个方阵表示,称为“矩阵”,并且定义 ( 0 − 1 1 0 ) ( a b ) \begin{pmatrix}0&-1\\1&0\end{pmatrix}\begin{pmatrix}a\\b\end{pmatrix} (01−10)(ab)是变换后的向量,即 ( 0 a − 1 b 1 a + 0 b ) \begin{pmatrix}0a-1b\\1a+0b\end{pmatrix} (0a−1b1a+0b)。
类似地,推广到n维空间,可以得到:
A = ( a 11 a 12 . . . a 1 n a 21 a 22 . . . a 2 n . . . . . . . . . . . . a n 1 a n 2 . . . a n n ) ( x 1 x 2 . . . x n ) = ( ∑ 1 ≤ i ≤ n a 1 i x i ∑ 1 ≤ i ≤ n a 2 i x i . . . ∑ 1 ≤ i ≤ n a n i x i ) A=\begin{pmatrix}a_{11}&a_{12}&...&a_{1n}\\a_{21}&a_{22}&...&a_{2n}\\...&...&...&...\\a_{n1}&a_{n2}&...&a_{nn}\end{pmatrix}\begin{pmatrix}x_1\\x_2\\...\\x_n\end{pmatrix}=\begin{pmatrix}\sum\limits_{1\le i\le n}a_{1i}x_i\\\sum\limits_{1\le i\le n}a_{2i}x_i\\...\\\sum\limits_{1\le i\le n}a_{ni}x_i\end{pmatrix} A=⎝⎜⎜⎛a11a21...an1a12a22...an2............a1na2n...ann⎠⎟⎟⎞⎝⎜⎜⎛x1x2...xn⎠⎟⎟⎞=⎝⎜⎜⎜⎜⎜⎛1≤i≤n∑a1ixi1≤i≤n∑a2ixi...1≤i≤n∑anixi⎠⎟⎟⎟⎟⎟⎞
但是,我们目前所述的所有矩阵,都是 n × n n\times n n×n的方阵。那么非方阵的 n × m n\times m n×m矩阵又是怎么回事?
事实上,线性变换并非n维到n维,一个从n维到m维的变换是完全合理的。例如以下的变换:
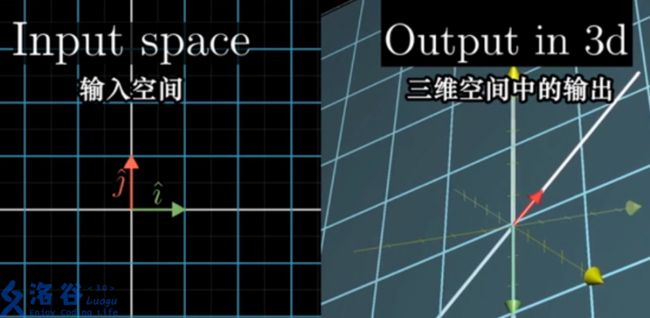
这是一个二维到三维的变换,可以看出,输出空间是一个三维空间中的斜面。我们同样把变换后的基向量坐标拼接在一起,成为一个 3 × 2 3\times2 3×2的矩阵:
( T r a n s ( e 1 x ) T r a n s ( e 2 x ) T r a n s ( e 1 y ) T r a n s ( e 2 y ) T r a n s ( e 1 z ) T r a n s ( e 2 z ) ) \begin{pmatrix}Trans(e1_x)&Trans(e2_x)\\Trans(e1_y)&Trans(e2_y)\\Trans(e1_z)&Trans(e2_z)\end{pmatrix} ⎝⎛Trans(e1x)Trans(e1y)Trans(e1z)Trans(e2x)Trans(e2y)Trans(e2z)⎠⎞
第一列和第二列分别是两个基e1和e2变换后的坐标。这个矩阵与二维向量相乘,并输出一个三维向量。这就是非方阵的意义。
总结一下重点
矩阵与线性变换一一对应。由于在线性变换前后同一线性组合的系数不变,则变换前后任意一个向量都可以写作基向量的同一线性组合,故我们可以用变换后的基唯一表示一个线性变换。我们将变换后的基向量从左到右写成一张数表,将其称为矩阵。线性变换作用于向量上,定义为矩阵左乘一个向量。
这里是时候讲矩阵乘法了。
考虑对X先作一个线性变换B,再作一个线性变换A,显然结果是 A ( B X ) = A B X A(BX)=ABX A(BX)=ABX(说明:矩阵乘法从左往右算,但是对应的线性变换是从右往左分别执行)。考虑到B是变换后的基,再作变换A,最终基落在 A B i AB_i ABi,其中i表示第i个基。因此我们用A对B中每个矩阵分别相乘,得到:
( A B ) i j = ∑ k = 1 m A i k B k j (AB)_{ij}=\sum\limits^m_{k=1}A_{ik}B_{kj} (AB)ij=k=1∑mAikBkj
事实上,由于线性变换并不一定与执行顺序无关,矩阵乘法没有交换律。
补充说明:“变换F执行后,网格线平行且等距”一性质,与下面的两条法则完全等价:
F ( f + p ) = F f + F p , F ( k f ) = k F f F(f+p)=Ff+Fp,F(kf)=kFf F(f+p)=Ff+Fp,F(kf)=kFf
Part3 行列式
在一个矩阵A对应的线性变换下,一个区域广义体积的放大率,称为A的行列式,记作 ∣ A ∣ |A| ∣A∣或 det ( A ) \det(A) det(A)。行列式的符号有严格的规定,后文将详述。但如果认为体积非负,那么放大率为行列式的绝对值 ∣ ∣ A ∣ ∣ ||A|| ∣∣A∣∣,在可能有歧义时,本文将行列式记作 det A \det A detA,绝对值记作 ∣ x ∣ |x| ∣x∣。
由“网格平行且等距分布”一性质,可得到一推论:任何区域在相同的线性变换下有相同的放大率。因此,只需要考虑标准正交基所形成的n维立方体的放大率。我们说过矩阵代表基的坐标,因此可以用n阶单位阵来表示标准正交基。则: det A = v o l ( A I ) / v o l ( I ) = v o l ( A ) \det A=vol(AI)/vol(I)=vol(A) detA=vol(AI)/vol(I)=vol(A),其中vol表示矩阵每个列向量所构成的n维平行多面体有向体积(即叉积)。
利用行列式几何意义显然可以得到如下性质( A i A_i Ai表示第i行或列向量):
性质1
det ( A 1 , . . . , a α + b β , . . . , A m ) = a det ( A 1 , . . . , α , . . . , A m ) + b det ( A 1 , . . . β , . . . , A m ) \det(A_1,...,a\alpha+b\beta,...,A_m)=a\det(A_1,...,\alpha,...,A_m)+b\det(A_1,...\beta,...,A_m) det(A1,...,aα+bβ,...,Am)=adet(A1,...,α,...,Am)+bdet(A1,...β,...,Am)
性质2(体积有向的体现)
det ( A 1 , . . . , A i , . . . , A j , . . . , A m ) = − det ( A 1 , . . . , A j , . . . , A i , . . . , A m ) \det(A_1,...,A_i,...,A_j,...,A_m)=-\det(A_1,...,A_j,...,A_i,...,A_m) det(A1,...,Ai,...,Aj,...,Am)=−det(A1,...,Aj,...,Ai,...,Am)
性质3
det ( A 1 , . . . , α , . . . , α , . . . , A m ) = 0 \det(A_1,...,\alpha,...,\alpha,...,A_m)=0 det(A1,...,α,...,α,...,Am)=0
利用这几个性质,有如下推导(E表示单位阵):
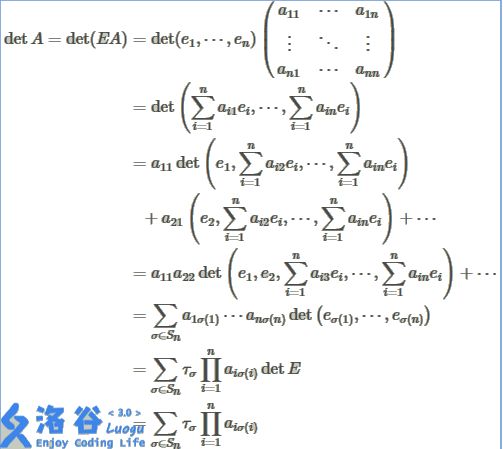 (LaTeX太长懒得打了)。
(LaTeX太长懒得打了)。
这便是同济《线性代数》书中的定义。其中 τ σ = ( − 1 ) 排列 σ 的逆序数 \tau_\sigma=(-1)^{\text{排列}\sigma\text{的逆序数}} τσ=(−1)排列σ的逆序数, σ \sigma σ为 1 , 2 , 3 , . . . , n 1,2,3,...,n 1,2,3,...,n的一个排列。
注意第6、7个等号后面的式子,有 det ( e σ ( 1 ) , . . . , e σ ( n ) ) = τ σ \det(e_{\sigma(1)},...,e_{\sigma(n)})=\tau_\sigma det(eσ(1),...,eσ(n))=τσ,这就是所谓“有向”体积。读者不妨从逆序数的定义出发,思考一下这个等式的实际意义。
行列式的计算:
基础概念
- 主对角线以下(上)的元素都为0的行列式叫做上(下)三角行列式。
- 既是上,又是下三角行列式的行列式叫做对角行列式。
- 去除矩阵A的第i行,第j列后的行列式称为 a i j a_{ij} aij的余子式,(在不引起歧义时)记作 M i j M_{ij} Mij。 ( − 1 ) i + j M i j (-1)^{i+j}M_{ij} (−1)i+jMij称为 a i j a_{ij} aij的代数余子式,(在不引起歧义时)记作 A i j A_{ij} Aij。
法一:转上(下)三角行列式,即高斯消元
行列式计算首推此法。
对于下三角行列式,有:
∣ a 11 a 21 a 22 a 31 a 32 a 33 . . . a m 1 a m 2 a m 3 . . . a m m ∣ = ∏ k = 1 m a k k \begin{vmatrix}a_{11}\\a_{21}&a_{22}\\a_{31}&a_{32}&a_{33}\\...\\a_{m1}&a_{m2}&a_{m3}&...&a_{mm}\end{vmatrix}=\prod\limits_{k=1}^ma_{kk} ∣∣∣∣∣∣∣∣∣∣a11a21a31...am1a22a32am2a33am3...amm∣∣∣∣∣∣∣∣∣∣=k=1∏makk
证:对于行列式展开式的乘积中不为0的元素 τ σ ∏ a i J i \tau_\sigma\prod a_{iJ_i} τσ∏aiJi,必有 J i < = i J_i<=i Ji<=i,又因为是1-n的一个排列,有 ∑ J i = 1 + 2 + . . . + n \sum J_i=1+2+...+n ∑Ji=1+2+...+n,可以迭代求出 J i = i J_i=i Ji=i。显然 τ σ = ( − 1 ) 0 = 1 \tau_\sigma=(-1)^0=1 τσ=(−1)0=1,所以得证。
应用性质1、2,可以把任何行列式转为这种形式。
例题:求
D = ∣ 2 0 1 1 − 4 − 1 − 1 8 3 ∣ D=\begin{vmatrix}2&0&1\\1&-4&-1\\-1&8&3\end{vmatrix} D=∣∣∣∣∣∣21−10−481−13∣∣∣∣∣∣
解:第一行加到第二行:
D = ∣ 2 0 1 3 − 4 0 − 1 8 3 ∣ D=\begin{vmatrix}2&0&1\\3&-4&0\\-1&8&3\end{vmatrix} D=∣∣∣∣∣∣23−10−48103∣∣∣∣∣∣
第三行乘-1/3加到第一行:
D = ∣ 7 3 − 8 3 0 3 − 4 0 − 1 8 3 ∣ = 1 3 ∣ 7 − 8 0 3 − 4 0 − 1 8 3 ∣ D=\begin{vmatrix}\dfrac73&-\dfrac83&0\\3&-4&0\\-1&8&3\end{vmatrix}=\dfrac13\begin{vmatrix}7&-8&0\\3&-4&0\\-1&8&3\end{vmatrix} D=∣∣∣∣∣∣∣373−1−38−48003∣∣∣∣∣∣∣=31∣∣∣∣∣∣73−1−8−48003∣∣∣∣∣∣
第二行乘-2加到第一行:
D = 1 3 ∣ 1 0 0 3 − 4 0 − 1 8 3 ∣ = − 4 D=\dfrac13\begin{vmatrix}1&0&0\\3&-4&0\\-1&8&3\end{vmatrix}=-4 D=31∣∣∣∣∣∣13−10−48003∣∣∣∣∣∣=−4
为了方便编程实现,一般转成上三角行列式。上三角行列式的值仍然等于对角线元素之积。读者不妨模仿下三角行列式证明之。
法二:按行(列)展开
定理: D = ∑ 1 ≤ j ≤ m a i j A i j D=\sum\limits_{1\le j\le m}a_{ij}A_{ij} D=1≤j≤m∑aijAij
求范德蒙德行列式是一个很好的例题。
D n = D_n= Dn=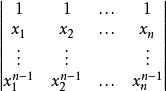 ,则
,则![]()
证明:
法三:公理化定义法
此方法一般用于求一些特殊东西的行列式,例如:
det F = k p , F f ( x ) = k f ( p x ) \det F=kp,Ff(x)=kf(px) detF=kp,Ff(x)=kf(px)
为啥?横纵坐标各放大k倍、p倍,总放大率当然是kp啦。至于函数变换为啥能求行列式?Part1有详细解释。
F f Ff Ff为线性变换的充要条件: f f f为向量,且 F ( f + g ) = F f + F g F(f+g)=Ff+Fg F(f+g)=Ff+Fg且 F ( k f ) = k F f F(kf)=kFf F(kf)=kFf。
再来一个比较复杂的例子:
F f ( x ) = ∫ − ∞ + ∞ f ( t ) e i x t d t Ff(x)=\int_{-\infty}^{+\infty}f(t)e^{ixt}dt Ff(x)=∫−∞+∞f(t)eixtdt
前面说了函数符合向量的定义,因此这显然是一个线性变换,因为 F ( f + g ) = F f + F g F(f+g)=Ff+Fg F(f+g)=Ff+Fg且 F ( k f ) = k F f F(kf)=kFf F(kf)=kFf。
它的逆变换呢?学过傅里叶变换的同学可以知道:
F − 1 f ( x ) = 1 2 π ∫ − ∞ + ∞ f ( t ) e − i x t d t F^{-1}f(x)=\frac1{2\pi}\int_{-\infty}^{+\infty}f(t)e^{-ixt}dt F−1f(x)=2π1∫−∞+∞f(t)e−ixtdt
x多了一个负号?这意味着将空间的手性取反。而这并不影响放大率,只影响符号。而由于 det ( k A ) = k det A \det(kA)=k\det A det(kA)=kdetA,故综上得到: det ( F − 1 ) = − 1 2 π det ( F ) \det(F^{-1})=-\dfrac1{2\pi}\det(F) det(F−1)=−2π1det(F)。
又因为 F F − 1 = I FF^{-1}=I FF−1=I,所以 det F ∗ det F − 1 = det ( F F − 1 ) = det I = 1 \det F*\det F^{-1}=\det(FF^{-1})=\det I=1 detF∗detF−1=det(FF−1)=detI=1
代入后得到 det F = ± 2 π \det F=\pm\sqrt{2\pi} detF=±2π。
Part4 逆矩阵、列空间与零空间
逆矩阵
满足 A B = B A = I AB=BA=I AB=BA=I时,称AB互为逆矩阵,记作 A = B − 1 A=B^{-1} A=B−1或 B = A − 1 B=A^{-1} B=A−1。
逆矩阵的几何直观是:在线性变换A下,向量X变为了向量Y,现在给出了A和Y,求倒退回X。显然因为 A X = Y AX=Y AX=Y,故 X = A − 1 A X = A − 1 Y X=A^{-1}AX=A^{-1}Y X=A−1AX=A−1Y。因为在一般情况下,执行变换A,再变回来( A − 1 A^{-1} A−1)等于什么都没做(恒等变换)。
然而事实上,当 det A = 0 \det A=0 detA=0时,由于放大率成了0,说明变换后的图形不再具有n维体积,必然降到了一个更低的维度。这就导致了许多个一个向量坐标变换后重叠。非单射函数没有反函数,因此A没有逆矩阵。
逆矩阵的求法如下:
前置概念:
- 把矩阵A中的每个元素换成其代数余子式,再进行转置运算,构成A的伴随矩阵,记作 A ∗ A^{*} A∗。
- 把矩阵的某一行(列)乘k加到另一行(列),或交换矩阵的两个行(列),称为矩阵的初等变换。一个矩阵经过有限次初等变换构成的矩阵,称为原矩阵的等价矩阵。
- 转置:把矩阵A的行换成同序数列的操作称为转置矩阵,记作 A T A^T AT。有:
( A T ) T = A (A^T)^T=A (AT)T=A
( A + B ) T = A T + B T (A+B)^T=A^T+B^T (A+B)T=AT+BT
( λ A ) T = λ A T (\lambda A)^T=\lambda A^T (λA)T=λAT
( A B ) T = B T A T (AB)^T=B^TA^T (AB)T=BTAT
example: ( a 11 a 12 . . . a 1 n a 21 a 22 . . . a 2 n . . . . . . . . . . . . a m 1 a m 2 . . . a m n ) T = ( a 11 a 21 . . . a m 1 a 12 a 22 . . . a m 2 . . . . . . . . . . . . a 1 n a 2 n . . . a m n ) \begin{pmatrix}a_{11}&a_{12}&...&a_{1n}\\a_{21}&a_{22}&...&a_{2n}\\...&...&...&...\\a_{m1}&a_{m2}&...&a_{mn}\end{pmatrix}^T=\begin{pmatrix}a_{11}&a_{21}&...&a_{m1}\\a_{12}&a_{22}&...&a_{m2}\\...&...&...&...\\a_{1n}&a_{2n}&...&a_{mn}\end{pmatrix} ⎝⎜⎜⎛a11a21...am1a12a22...am2............a1na2n...amn⎠⎟⎟⎞T=⎝⎜⎜⎛a11a12...a1na21a22...a2n............am1am2...amn⎠⎟⎟⎞
定理: A − 1 = 1 ∣ A ∣ A ∗ A^{-1}=\dfrac1{|A|}A^{*} A−1=∣A∣1A∗
显然A有逆的充要条件是 ∣ A ∣ ≠ 0 |A|\not=0 ∣A∣=0。利用 ∣ A B ∣ = ∣ A ∣ ∣ B ∣ |AB|=|A||B| ∣AB∣=∣A∣∣B∣可以非常轻松地证明此条件,此处不再赘述。我们把 ∣ A ∣ = 0 |A|=0 ∣A∣=0的矩阵称为奇异矩阵,否则称为非奇异矩阵。
另一种方法:高斯消元
构造增广矩阵 [ A ∣ I ] [A|I] [A∣I](把A写在左边,I写在右边拼接成的矩阵),用初等变换变换把左边变换为与之等价的对角矩阵。每行提出一个系数,把增广矩阵变换成 [ I ∣ B ] [I|B] [I∣B]的形式。则 B = A − 1 B=A^{-1} B=A−1。
证明:因为只有初等变换,所以相当于 P [ A ∣ I ] = [ I ∣ B ] P[A|I]=[I|B] P[A∣I]=[I∣B],即 P A = I , P = B PA=I,P=B PA=I,P=B。因此得证。
一些性质:
( A − 1 ) − 1 = A (A^{-1})^{-1}=A (A−1)−1=A
( k A ) − 1 = 1 k A − 1 (kA)^{-1}=\dfrac1k A^{-1} (kA)−1=k1A−1
( A B ) − 1 = B − 1 A − 1 (AB)^{-1}=B^{-1}A^{-1} (AB)−1=B−1A−1
例题:
1.求X使 A X B = C AXB=C AXB=C
解: A − 1 C B − 1 = A − 1 A X B B − 1 = X A^{-1}CB^{-1}=A^{-1}AXBB^{-1}=X A−1CB−1=A−1AXBB−1=X
列空间、零空间与秩
三句话概括书中也许十分冗长的定义:
列空间:矩阵的所有列向量张成的空间。
秩:矩阵列空间的维数。记作 r a n k ( A ) rank(A) rank(A)。
零空间:使关于向量X的方程 A X = O AX=O AX=O的解空间。
当秩等于矩阵的行数和列数的最小值时,称为满秩。只有秩不满时,空间被变换成一个维度更低的空间,则显然有无数组向量被压缩到原点,只有满秩时,零空间有且仅有一个向量构成。很明显地,一个矩阵为满秩当且仅当行列式非零。
Part5 基变换
现在有一个线性空间,有两组基向量。那么在每一组基下,向量 ( a , b , . . . ) (a,b,...) (a,b,...)会被看做这一组基 e 1 , e 2 , . . . e_1,e_2,... e1,e2,...的线性组合 a e 1 + b e 2 + . . . ae_1+be_2+... ae1+be2+...。
可以看出,同一个向量在不同的基下有不同的坐标。那么如何把一个向量在两组不同的基中转换?现在的基是一组标准正交基,前面说过那么矩阵的每一列就代表每一个基变换后的坐标。我们把新的基从左到右凑成一个矩阵,称为变换矩阵。用这个矩阵左乘新基下的向量,就能得到这个向量在原有基的意义下的坐标。而现有基下的向量左乘变换矩阵的逆矩阵,即可得到新基下的表示。
例如,向量 ( a , b ) (a,b) (a,b)在新的基 ( 1 , 1 ) , ( 0 , 1 ) (1,1),(0,1) (1,1),(0,1)下表示为 ( 1 0 1 1 ) − 1 ( a b ) \begin{pmatrix}1&0\\1&1\end{pmatrix}^{-1}\begin{pmatrix}a\\b\end{pmatrix} (1101)−1(ab)。
在进一步,用新基意义下的一个矩阵A作用在现有基下的向量X,结果用现有基来表示。这个问题如何解决?
可以先对向量做基变换(左乘 P − 1 P^{-1} P−1),再变换回来。设变换矩阵为P,则结果: P A P − 1 X PAP^{-1}X PAP−1X。
这样的变换有什么用武之地呢?下一部分揭晓。
Part6 特征向量与特征值
可以发现,在某些变换后,有一系列向量仍然位于原来的直线上,它们只被进行了缩放,而没有改变方向。求出这些特殊向量使很有价值的,因此有如下定义:
若 A X = k X AX=kX AX=kX,其中k为数,则称X为A的特征向量,k为A的特征值。
则 ( A − k I ) X = 0 (A-kI)X=0 (A−kI)X=0,由 det ( A B ) = det A det B \det(AB)=\det A\det B det(AB)=detAdetB得:若X不是零向量,则 det ( A − k I ) = 0 \det(A-kI)=0 det(A−kI)=0。
它的一个应用是对角化矩阵:定理:若 P − 1 A P P^{-1}AP P−1AP为对角矩阵,则 p i p_i pi为A的特征向量。
证:设 P − 1 A P = d i a g ( k 1 , k 2 , . . . , k n ) = K P^{-1}AP=diag(k_1,k_2,...,k_n)=K P−1AP=diag(k1,k2,...,kn)=K(注:表示对角线分别为 k 1 , . . . , k n k_1,...,k_n k1,...,kn的对角矩阵),则: A P = P K AP=PK AP=PK,则显然有 A p i = k i p i Ap_i=k_ip_i Api=kipi,得 ( A − k i ) p i = 0 (A-k_i)p_i=0 (A−ki)pi=0,即P的第i列向量 p i p_i pi是A的特征向量, k i k_i ki是对应的特征值。
我们结合Part5基变换的知识,可以得到:
A = P K P − 1 A=PKP^{-1} A=PKP−1
因此
A n = P K P − 1 P . . . P − 1 P K P − 1 = P K n P − 1 A^n=PKP^{-1}P...P^{-1}PKP^{-1}=PK^nP^{-1} An=PKP−1P...P−1PKP−1=PKnP−1
这就给出了一个计算矩阵n次幂的有效方法。
例如:斐波那契数列满足:
( F n F n − 1 ) = ( 1 1 1 0 ) n ( 0 − 1 ) \begin{pmatrix}F_n\\F_{n-1}\end{pmatrix}=\begin{pmatrix}1&1\\1&0\end{pmatrix}^{n}\begin{pmatrix}0\\-1\end{pmatrix} (FnFn−1)=(1110)n(0−1)
那么特征值有 ∣ 1 − k 1 1 − k ∣ = 0 \begin{vmatrix}1-k&1\\1&-k\end{vmatrix}=0 ∣∣∣∣1−k11−k∣∣∣∣=0
解得: k = 1 ± 5 2 k=\dfrac{1\pm\sqrt5}2 k=21±5则 K = ( 1 + 5 2 0 0 1 − 5 2 ) K=\begin{pmatrix}\dfrac{1+\sqrt5}2&0\\0&\dfrac{1-\sqrt5}2\end{pmatrix} K=⎝⎜⎛21+50021−5⎠⎟⎞
特征向量: ( 1 1 1 0 ) ( x y ) = k ( x y ) \begin{pmatrix}1&1\\1&0\end{pmatrix}\begin{pmatrix}x\\y\end{pmatrix}=k\begin{pmatrix}x\\y\end{pmatrix} (1110)(xy)=k(xy)
求解后发现: x = 1 ± 5 2 y x=\dfrac{1\pm\sqrt5}2y x=21±5y
取一组简单一点的解: ( 1 + 5 1 − 5 2 2 ) \begin{pmatrix}1+\sqrt5&1-\sqrt5\\2&2\end{pmatrix} (1+521−52)
这就得到了P。
剩余内容请自行完成。推荐使用Geogebra软件帮助计算。
这里po出结果: F n = 5 5 ( ( 1 + 5 5 ) n − ( 1 − 5 5 ) n ) F_n=\dfrac{\sqrt5}5((\dfrac{1+\sqrt5}5)^n-(\dfrac{1-\sqrt5}5)^n) Fn=55((51+5)n−(51−5)n)
Part7 克拉默法则
方程组
{ a 11 x 1 + a 12 x 2 + . . . + a 1 n x n = b 1 a 21 x 1 + a 22 x 2 + . . . + a 2 n x n = b 2 . . . . . . a m 1 x 1 + a m 2 x 2 + . . . + a m n x n = b m \begin{cases}a_{11}x_1+a_{12}x_2+...+a_{1n}x_n=b_1\\a_{21}x_1+a_{22}x_2+...+a_{2n}x_n=b_2\\......\\a_{m1}x_1+a_{m2}x_2+...+a_{mn}x_n=b_m\end{cases} ⎩⎪⎪⎪⎨⎪⎪⎪⎧a11x1+a12x2+...+a1nxn=b1a21x1+a22x2+...+a2nxn=b2......am1x1+am2x2+...+amnxn=bm
当其系数矩阵A的行列式非零时,有唯一解:
x i = ∣ A i ∣ ∣ A ∣ x_i=\dfrac{|A_i|}{|A|} xi=∣A∣∣Ai∣
其中
∣ A i ∣ = det ( A 1 , . . . , A i − 1 , B , . . . , A m ) |A_i|=\det(A_1,...,A_{i-1},B,...,A_m) ∣Ai∣=det(A1,...,Ai−1,B,...,Am)
普通的证明可以百度,但这里我们用几何角度来解释。
对于二维变换,我们可以这样理解:
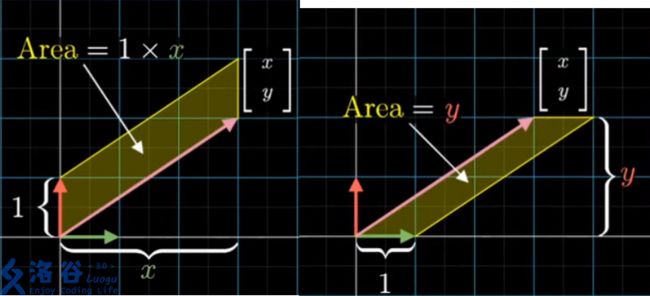
即用平行四边形面积表示x和y。
例如变换 A X = ( 2 − 1 0 1 ) ( x y ) = B AX=\begin{pmatrix}2&-1\\0&1\end{pmatrix}\begin{pmatrix}x\\y\end{pmatrix}=B AX=(20−11)(xy)=B
我们就可以用这个平行四边形变换后的面积/行列式=x或y。
那么如何求变换后的面积?
显然变换后的基由矩阵给出,则变换后x轴基 = ( 2 , 0 ) =(2,0) =(2,0),y轴基 = ( − 1 , 1 ) =(-1,1) =(−1,1)。那么途中粉色的部分变换后显然由方程中的B向量给出。因此,变换后面积=基向量与B构成的平行四边形面积。由于前文讲过的行列式几何意义,有:
x = ∣ b 1 − 1 b 2 1 ∣ det A , y = ∣ 2 b 1 0 b 2 ∣ det A x=\dfrac{\begin{vmatrix}b_1&-1\\b_2&1\end{vmatrix}}{\det A},y=\dfrac{\begin{vmatrix}2&b_1\\0&b_2\end{vmatrix}}{\det A} x=detA∣∣∣∣b1b2−11∣∣∣∣,y=detA∣∣∣∣20b1b2∣∣∣∣
推广到n维变换,亦是如此。
Part8 一些彩蛋
1.如果认为函数 f ( x ) = ∑ k = 0 n a k x k f(x)=\sum\limits_{k=0}^na_kx^k f(x)=k=0∑nakxk的向量表示如下:
f ( x ) = ( a 0 a 1 x a 2 x 2 . . . ) f(x)=\begin{pmatrix}a_0\\a_1x\\a_2x^2\\...\end{pmatrix} f(x)=⎝⎜⎜⎛a0a1xa2x2...⎠⎟⎟⎞
则微分算符 D = d d x D=\dfrac{d}{dx} D=dxd满足:
D = ( 0 1 0 0 . . . 0 0 2 0 . . . 0 0 0 3 . . . . . . . . . . . . . . . ) D=\begin{pmatrix}0&1&0&0&...\\0&0&2&0&...\\0&0&0&3&...\\...&...&...&...\end{pmatrix} D=⎝⎜⎜⎛000...100...020...003............⎠⎟⎟⎞
显然有 det D = 0 \det D=0 detD=0,因为第一列为0向量。这有一个很好的解释:微分算符D是没有逆运算的。
2.傅里叶变换是可以求特征向量的。它的特征向量为