【Yolov1模型复现】— by pytorch
参考视频
Model
模型结构
*ps:最后4096 -> 7x7x30之间应该是:4096 -> 1470(=7x7x30) ->1470 reshape 为 7x7x30
输入:448 x 448 x 3 的图片
输出:7 x 7 x 30 向量,解释如下
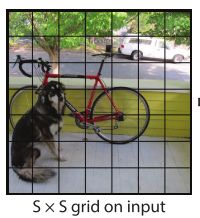
7 x 7:论文中将每张图片划分为7 x 7的grid cell
30:每一个grid cell会生成两个boundingbox,1~5为第一个boundingbox的参数,6~10为第二个,11~30为20个类别的条件概率(论文中所使用的数据集所包含的类别)
boundingbox参数:
P(object):是物体的概率
x,y:grid cell 中心点的位置
w,h:boundingbox 的宽高
P(class|object):是物体的条件下是某个类的概率

代码
import torch
import torch.nn as nn
"""
元祖:代表一个卷积结构 (kernel_size, out_channels, stride, padding)
"M" 代表 maxpooling,stride 2x2 and kernel 2x2
列表: 包含卷积结构和重复次数
"""
architecture_config = [
(7, 64, 2, 3),
"M",
(3, 192, 1, 1),
"M",
(1, 128, 1, 0),
(3, 256, 1, 1),
(1, 256, 1, 0),
(3, 512, 1, 1),
"M",
[(1, 256, 1, 0), (3, 512, 1, 1), 4],
(1, 512, 1, 0),
(3, 1024, 1, 1),
"M",
[(1, 512, 1, 0), (3, 1024, 1, 1), 2],
(3, 1024, 1, 1),
(3, 1024, 2, 1),
(3, 1024, 1, 1),
(3, 1024, 1, 1),
]
# 构建一个cnn block 方便重复调用
class CNNBlock(nn.Module):
def __init__(self, in_channels, out_channels, **kwargs):
super().__init__()
self.cnnblock = nn.Sequential(
nn.Conv2d(in_channels, out_channels, bias=False, **kwargs),
nn.BatchNorm2d(out_channels),
nn.LeakyReLU(0.1)
)
def forward(self, x):
return self.cnnblock(x)
class Yolov1(nn.Module):
def __init__(self, in_channels=3, **kwargs):
super(Yolov1, self).__init__()
self.architecture = architecture_config
self.in_channels = in_channels
# 作者表示该网络再借助函数实现,因此成为 darknet
self.darknet = self._create_conv_layers(self.architecture)
# fcs 最后的全联接层
self.fcs = self._create_fcs(**kwargs)
def forward(self, x):
x = self.darknet(x)
# 在输入全联接层前先展开为一个一维的向量
return self.fcs(torch.flatten(x, start_dim=1))
def _create_conv_layers(self, architecture):
# 将所构建的层都用一个列表保存起来
layers = []
in_channels = self.in_channels
#遍历结构配置
for x in architecture:
if type(x) == tuple:
layers += [
CNNBlock(
in_channels,
out_channels=x[1],
kernel_size=x[0],
stride=x[2],
padding=x[3],
)
]
# 通过一层
in_channels = x[1]
elif type(x) == str:
layers += [nn.MaxPool2d(kernel_size=(2, 2), stride=(2, 2))]
elif type(x) == list:
# 元组 1 —— 卷积核 1
conv1 = x[0]
# 元祖 2 —— 卷积核 2
conv2 = x[1]
num_repeats = x[2]
for _ in range(num_repeats):
layers += [
CNNBlock(
in_channels,
out_channels=conv1[1],
kernel_size=conv1[0],
stride=conv1[2],
padding=conv1[3],
)
]
layers += [
CNNBlock(
in_channels=conv1[1],
out_channels=conv2[1],
kernel_size=conv2[0],
stride=conv2[2],
padding=conv2[3],
)
]
in_channels = conv2[1]
# 将列表解包,获得所构建的每一层,python语法
return nn.Sequential(*layers)
def _create_fcs(self, split_size, num_boxes, num_classes):
S, B, C = split_size, num_boxes, num_classes
return nn.Sequential(
nn.Flatten(),
nn.Linear(1024 * S * S, 4096),
nn.Dropout(0.0),
nn.LeakyReLU(0.1),
# 如*所述:4096 -> 1470
nn.Linear(4096, S * S * (C + B * 5)),
)