NNDL 作业10:第六章课后题(LSTM | GRU)
文章目录
-
- 习题6-3
- 习题6-4
- 习题6-5
- 附加题 6-1P
- 附加题 6-2P
- 参考链接
习题6-3
当使用公式(6.50)作为循环神经网络得状态更新公式时,分析其可能存在梯度爆炸的原因并给出解决办法.
公式是:![]() 还会存在两个问题
还会存在两个问题
(1)梯度爆炸问题:令![]() 为在第k时刻函数g(·)的输入,在计算公式
为在第k时刻函数g(·)的输入,在计算公式 中的误差项
中的误差项![]() 时,梯度可能会过大,从而导致梯度爆炸问题
时,梯度可能会过大,从而导致梯度爆炸问题
(2)记忆容量问题:随着ht不断累积存储新的输入信息,会发生饱和现象。假设g(·)为Logistic函数,则随着时间t的增长,ht会变得越来越大,从而导致h变得饱和,也就是说,隐状态ht可以存储的信息是有限的,随着记忆单元存储的内容越来越多,其丢失的信息也就越来越多。
解决方法:在公式6.50的基础上引入门控机制来控制信息的累积速度,包括有选择地加入新的信息,并有选择地遗忘之前累积的信息。
习题6-4
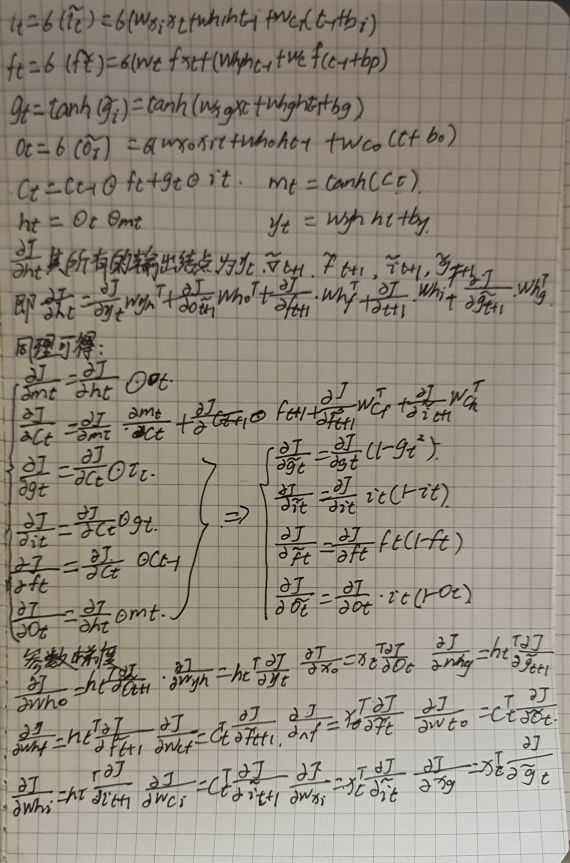
推导LSTM网络中参数的梯度,并分析其避免梯度消失的效果
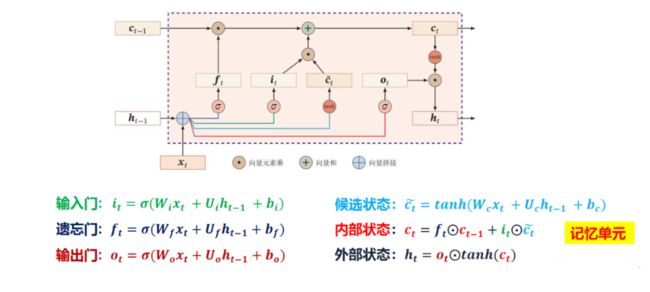

由上述可以得出,RNN的输出由连乘决定,连乘可能会出现梯度消失。LSTM的输出由累加决定,累加的方式克服了上述的问题。
习题6-5
推导GRU网络中参数的梯度,并分析其避免梯度消失的效果




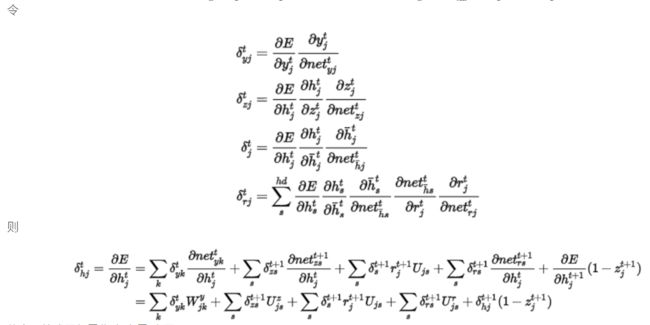

GPU具有调节信息流动的门单元,但没有一个单独的记忆单元,GPU将输入门和遗忘门整合成一个升级门,通过门控制梯度。
附加题 6-1P
什么时候应该用GRU? 什么时候用LSTM?
GRU和LSTM的区别在于:
(1)GRU通过更新门来控制上一时刻的信息传递和当前时刻计算的隐层信息传递。GRU中由于是一个参数进行控制,因而可以选择完全记住上一时刻而不需要当前计算的隐层值,或者完全选择当前计算的隐层值而忽略上一时刻的所有信息,最后一种情况就是无论是上一时刻的信息还是当前计算的隐层值都选择传递到当前时刻隐层值,只是选择的比重不同。而LSTM是由两个参数(遗忘门和输入门)来控制更新的,他们之间并不想GRU中一样只是由一个参数控制,因而在比重选择方面跟GRU有着很大的区别,例如它可以既不选择上一时刻的信息,也不选择当前计算的隐层值信息(输入门拒绝输入,遗忘门选择遗忘)。
(2)GRU要在上一时刻的隐层信息的基础上乘上一个重置门,而LSTM无需门来对其控制,LSTM必须考虑上一时刻的隐层信息对当前隐层的影响,而GRU则可选择是否考虑上一时刻的隐层信息对当前时刻的影响。
一般来说两者效果差不多,性能在很多任务上也不分伯仲。GRU参数更少,收敛更快;数据量很大时,LSTM效果会更好一些,因为LSTM参数也比GRU参数多一些。
附加题 6-2P
LSTM BP推导,并用Numpy实现
代码如下:
import numpy as np
def sigmoid(x):
return 1 / (1 + np.exp(-x))
def softmax(x):
e_x = np.exp(x - np.max(x)) # 防溢出
return e_x / e_x.sum(axis=0)
def LSTM_CELL_Forward(xt, h_prev, C_prev, parameters):
"""
Arguments:
xt:时间步“t”处输入的数据 shape(n_x,m)
h_prev:时间步“t-1”的隐藏状态 shape(n_h,m)
C_prev:时间步“t-1”的memory状态 shape(n_h,m)
parameters
Wf 遗忘门的权重矩阵 shape(n_h,n_h+n_x)
bf 遗忘门的偏置 shape(n_h,1)
Wi 输入门的权重矩阵 shape(n_h,n_h+n_x)
bi 输入门的偏置 shape(n_h,1)
Wc 第一个“tanh”的权重矩阵 shape(n_h,n_h+n_x)
bc 第一个“tanh”的偏差 shape(n_h,1)
Wo 输出门的权重矩阵 shape(n_h,n_h+n_x)
bo 输出门的偏置 shape(n_h,1)
Wy 将隐藏状态与输出关联的权重矩阵 shape(n_y,n_h)
by 隐藏状态与输出相关的偏置 shape(n_y,1)
Returns:
h_next -- 下一个隐藏状态 shape(n_h,m)
c_next -- 下一个memory状态 shape(n_h,m)
yt_pred -- 时间步长“t”的预测 shape(n_y,m)
"""
# 获取参数字典中各个参数
Wf = parameters["Wf"]
bf = parameters["bf"]
Wi = parameters["Wi"]
bi = parameters["bi"]
Wc = parameters["Wc"]
bc = parameters["bc"]
Wo = parameters["Wo"]
bo = parameters["bo"]
Wy = parameters["Wy"]
by = parameters["by"]
# 获取 xt 和 Wy 的维度参数
n_x, m = xt.shape
n_y, n_h = Wy.shape
# 拼接 h_prev 和 xt
concat = np.zeros((n_x + n_h, m))
concat[: n_h, :] = h_prev
concat[n_h:, :] = xt
# 计算遗忘门、输入门、记忆细胞候选值、下一时间步的记忆细胞、输出门和下一时间步的隐状态值
ft = sigmoid(np.dot(Wf, concat) + bf)
it = sigmoid(np.dot(Wi, concat) + bi)
cct = np.tanh(np.dot(Wc, concat) + bc)
c_next = ft * c_prev + it * cct
ot = sigmoid(np.dot(Wo, concat) + bo)
h_next = ot * np.tanh(c_next)
# LSTM单元的计算预测
yt_pred = softmax(np.dot(Wy, h_next) + by)
return h_next, c_next, yt_pred
np.random.seed(1)
xt = np.random.randn(3, 10)
h_prev = np.random.randn(5, 10)
c_prev = np.random.randn(5, 10)
Wf = np.random.randn(5, 5 + 3)
bf = np.random.randn(5, 1)
Wi = np.random.randn(5, 5 + 3)
bi = np.random.randn(5, 1)
Wo = np.random.randn(5, 5 + 3)
bo = np.random.randn(5, 1)
Wc = np.random.randn(5, 5 + 3)
bc = np.random.randn(5, 1)
Wy = np.random.randn(2, 5)
by = np.random.randn(2, 1)
parameters = {"Wf": Wf, "Wi": Wi, "Wo": Wo, "Wc": Wc, "Wy": Wy, "bf": bf, "bi": bi, "bo": bo, "bc": bc, "by": by}
h_next, c_next, yt = LSTM_CELL_Forward(xt, h_prev, c_prev, parameters)
print("a_next[4] = ", h_next[4])
print("a_next.shape = ", c_next.shape)
print("c_next[2] = ", c_next[2])
print("c_next.shape = ", c_next.shape)
print("yt[1] =", yt[1])
print("yt.shape = ", yt.shape)
运行结果:

参考链接
LSTM如何解决梯度消失或爆炸的?
GRU和LSTM区别
GRU(Gated Recurrent Unit) 更新过程推导及简单代码实现
人人都能看懂的LSTM介绍及反向传播算法推导(非常详细)