ubuntu18.04编译安装orb-slam2
1.opencv3.2编译安装
一 、下载链接:https://opencv.org/releases/page/6/ 源码下载
二、解压安装:
![]()
三、进入opencv3.2源码文件夹并安装相应库:

sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg.dev libtiff5.dev libswscale-dev libjasper-dev
漫长的等待…
四、在opencv3.2源码文件夹中创建build文件夹并在该文件夹中进行编译配置:
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local ..
配置失败

网速问题,将ippicv_linux_20151201.tgz下载后复制到相应文件夹下,重新打开一个终端进行编译配置(必须重新打开一个终端)
![]()
配置成功:

五、进行编译及安装
sudo make -j4
sudo make install



查看opencv是否安装成功:
![]()
2.Eigen编译安装
一、下载链接
https://eigen.tuxfamily.org/index.php?title=Main_Page

二、编译配置
三、编译
mkdir build
cd build
cmake ..
sudo install make
四、添加至系统
sudo cp -r /usr/local/include/eigen3/Eigen /usr/local/include
3.Pangolin安装
一、下载源码
git clone https://github.com/stevenlovegrove/Pangolin.git
二、安装依赖
sudo apt-get install libglew-dev libboost-dev libboost-thread-dev libboost-filesystem-dev libpython2.7-dev
三、编译安装
cd Pangolin
mkdir build && cd build
cmake ..
cmake --build .
make -j4
sudo make install
四、测试
cd Pangolin/build/examples/HelloPangolin
./HelloPangolin
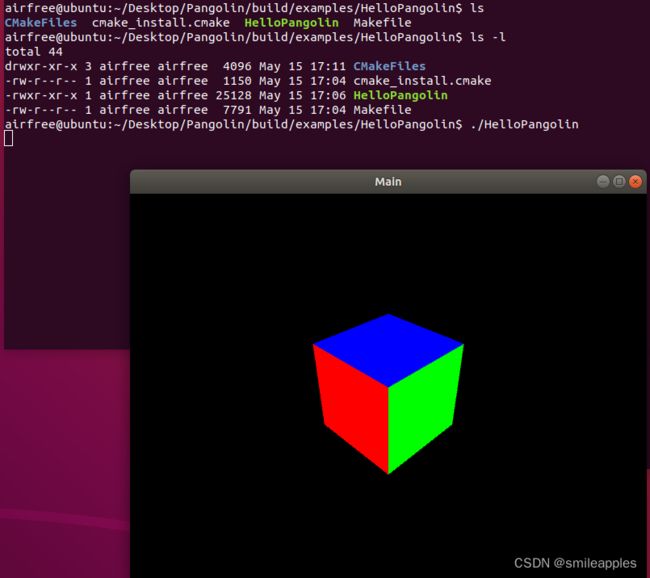
Pangolin成功安装!
4. DBoW2安装
git clone https://github.com/dorian3d/DBoW2.git
cd DBoW2
mkdir build
cd build
cmake ..
make -j4
sudo make install
5.升级G++
一、添加源
sudo add-apt-repository ppa:ubuntu-toolchain-r/test

二、安装
sudo add-apt-repository ppa:ubuntu-toolchain-r/test
sudo apt-get update
sudo apt-get install gcc-4.8 g++-4.8

完成安装
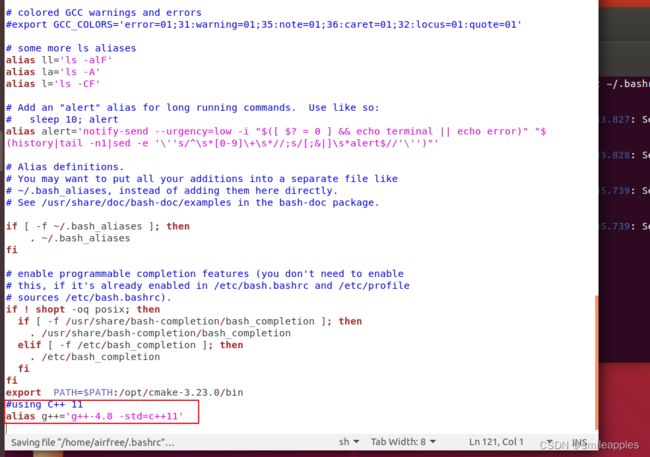
三、配置
sudo vim ~/.bashrc
#using C++ 11
alias g++='g++-4.8 -std=c++11'
source ~/.bashrc
四、安装 gdb 7.6
wget http://ftp.gnu.org/gnu/gdb/gdb-7.6.1.tar.gz
tar -xzvf gdb-7.6.1.tar.gz
cd gdb-7.6.1
./configure
make
make install
make编译出错:

7.g2o安装
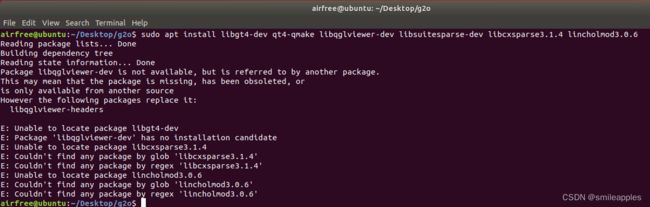
一、依赖项安装
sudo apt install libgt4-dev qt4-qmake libqglviewer-dev libsuitesparse-dev libcxsparse3.1.4 lincholmod3.0.6
sudo apt install libqglviewer-dev-qt4 //少了这一个一直报错
sudo apt-get update
sudo apt-get upgrade
二、源码下载
git clone https://github.com/RainerKuemmerle/g2o.git
三、编译安装
mkdir build
cd build
cmake ..
make -j4
sudo make install
cmake 版本过低

四、升级cmake
参考博客:https://blog.csdn.net/hfuttobuaa/article/details/124276205
# 下载cmake源码包
wget https://github.com/Kitware/CMake/releases/download/v3.23.0/cmake-3.23.0-linux-x86_64.tar.gz
tar -xzvf cmake-3.23.0-Linux-x86_64.tar.gz
sudo mv cmake-3.23.0-Linux-x86_64 /opt/cmake-3.23.0
sudo ln -sf /opt/cmake-3.23.0/bin/* /usr/bin/
查看cmake版本
cmake --version
添加至系统:
sudo gedit ~/.bashrc
export PATH=$PATH:/opt/cmake-3.23.0/bin
刷新配置:
source ~/.bashrc
8.orb-slam3编译安装
cd ORB_SLAM2
chmod +x build.sh
./build.sh
编译报错(一)
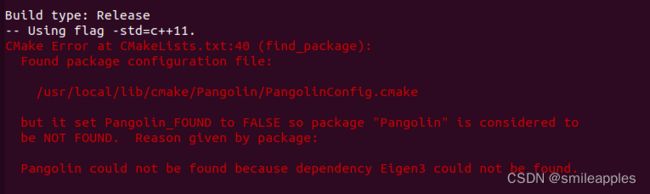
原因在于pangolin版本过高
编译报错(二)
安装版本为3.2的eigen
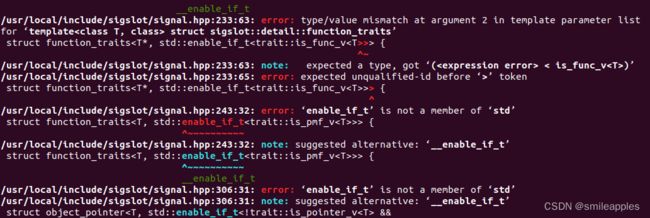
编译错误(三)
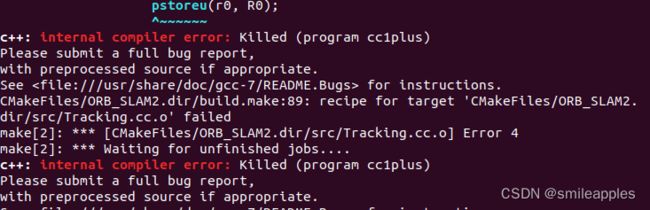
内存不足出错
解决方法:增加swap space 交换空间
解决办法参考:
https://www.jianshu.com/p/901399e0e44b
sudo dd if=/dev/zero of=/media/swapfile.img bs=1024 count=1M
sudo mkswap /media/swapfile.img
# Add this line to /etc/fstab
sudo gedit /etc/fstab
//加入
/media/swapfile.img swap swap sw 0 0
// 激活
sudo swapon /media/swapfile.img
9.运行
cd /home/airfree/Desktop/ORB_SLAM2-master
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml /home/airfree/Desktop/rgbd_dataset_freiburg1_xyz/rgbd_dataset_freiburg1_xyz/

至此,成功运行!