深度学习入门(1)
一、引言
1.什么是神经网络
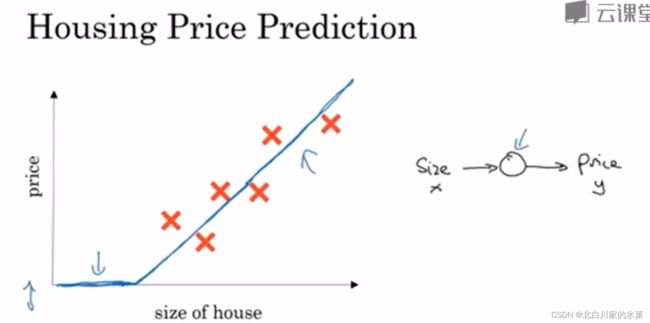
图中输入为房子面积,输出为放假,小圆圈是神经元
图中的函数为ReLU函数,即修正线性单元
神经网络就是多个神经元连接在一起,如图:
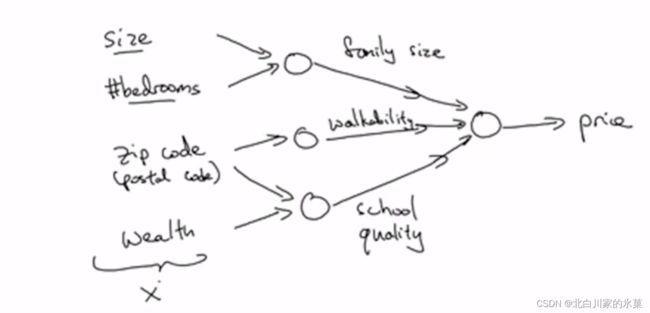
该图中输入为房子大小,卧室数量,邮政编码,家庭财富状况,输出为房价
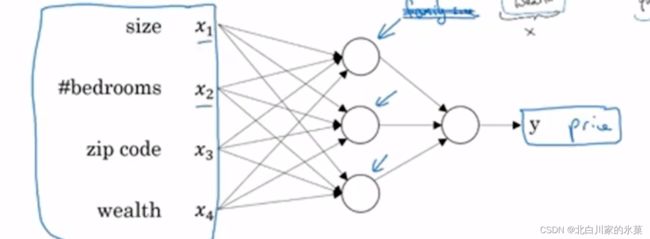
实际上,神经网络中,中间的”球球“并不是很清晰的,而是相对模糊,即每个球都受整个输入层所有输入的影响,而不是仅受特定输入的影响,如图:
2.supervised learning
① 常见神经网络
房地产,在线广告 → 使用标准神经网络 Standard NN
图像领域 → 卷积神经网络 Convolutional NN (CNN)
序列数据 → recurrent NN (RNN)

② 结构化数据与非结构化数据
结构化数据:一半来自于数据库等,每个量都有非常清晰的定义
非结构化数据: 音频,图像,文字,对于计算机比结构化数据更难理解
3.深度学习流行的原因
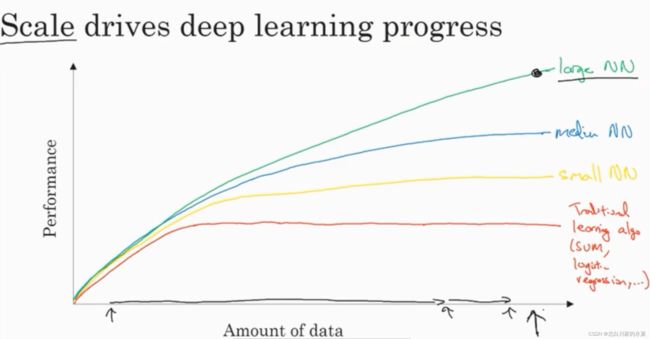
对于规模越大的神经网络,输入的数据量越大,则表现的越好
二、神经网络编程的基础知识
1.二分分类
![]()
![]() 也可以写作n
也可以写作n
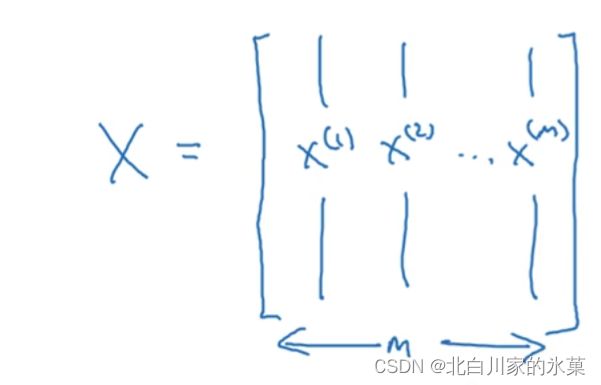
设有m个训练样本,即:![]()
整体的训练集则是![]() ×m的大矩阵,即:
×m的大矩阵,即:
对于输出,则:


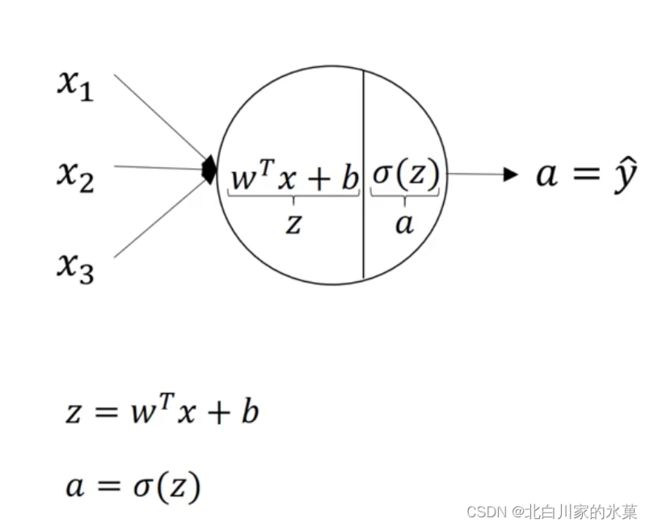
2.logistic 回归
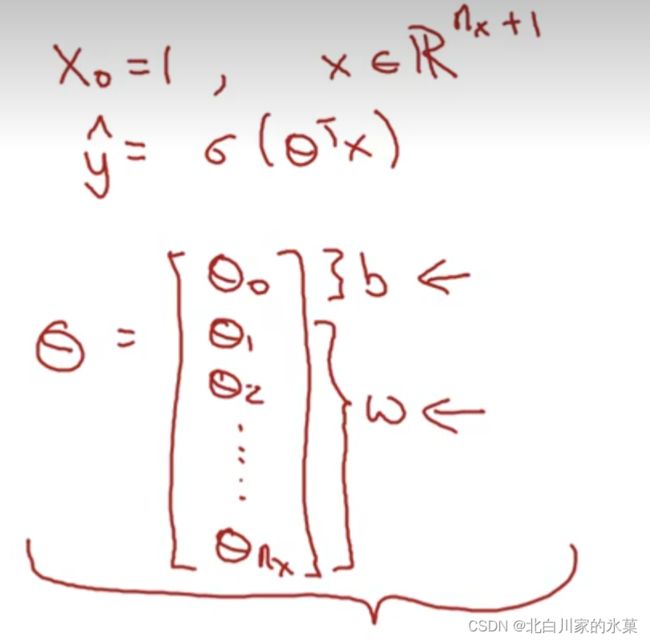
given x ,我们希望获得
![]()
![]()
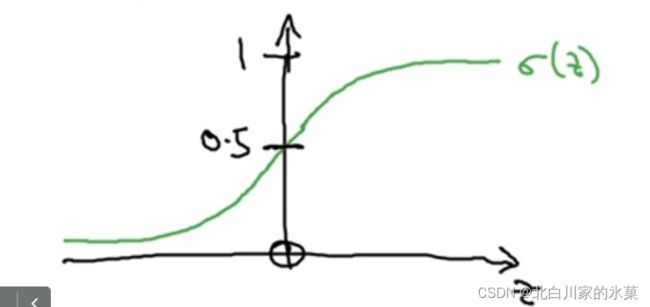
![]()
![]() ,为了获得在01之间的概率
,为了获得在01之间的概率
同时有以下写法:
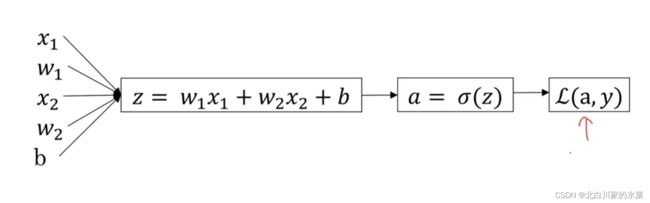
3.回归损失函数

其中这里的i指的是第i次训练
我们回归损失函数是个凸函数,可以找到最优解,令:
![]()
构造的原理如下:
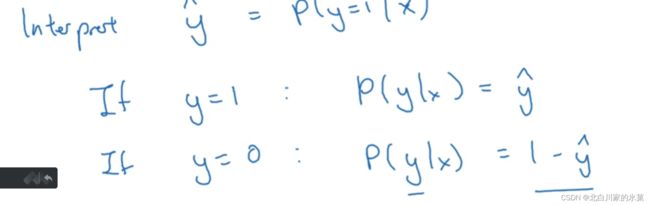
构造以下概率表达式: 
取对数:

最后加负号,因为一般我们希望概率是最大的,但是对应cost 函数,我们希望他的值最小

根据上面的绿字可以分析数来,当损失函数最小时,我们总是期望![]() 接近y,即保证了预测的准确性
接近y,即保证了预测的准确性
Cost function :
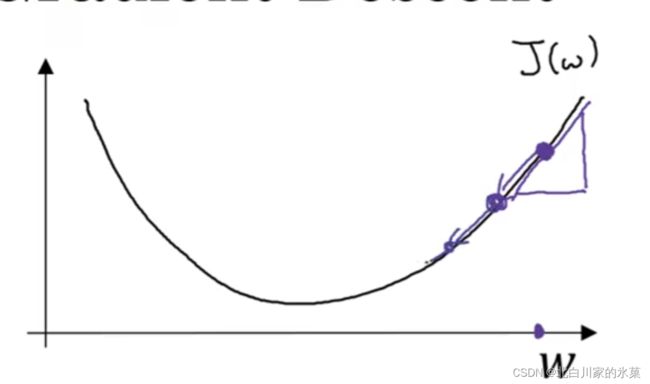
4.梯度下降法
以一维度的w和b为例,
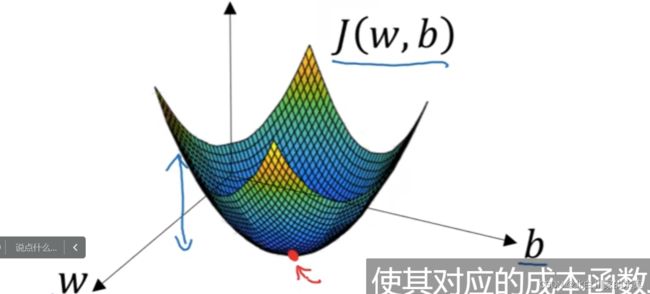
我们希望从起始点沿着梯度最大的路径以一定的步长向下降,直到达到最优解,或者接近最优解
![]()
在代码中,经常把![]() 写作
写作![]()
 成为学习率,决定了每次下降的步长
成为学习率,决定了每次下降的步长
对于J(w,b)同理

即分别沿着两个变量的最大梯度下降
数学基础 ————导数
① 计算图
例:
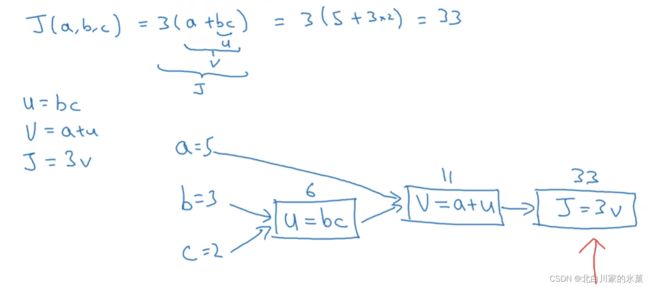
该过程的逆过程,就是导数的求取过程
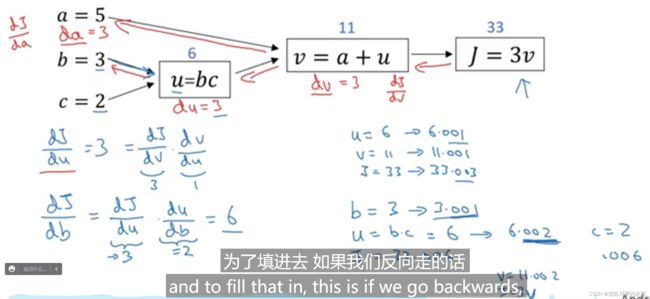
说完数学基础后,可以进一步研究logistics 中的梯度下降
下面这个图万分的重要!!!!!!!!!!!

则:
![]()
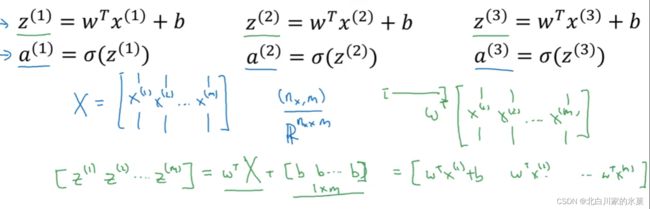
当输入有m个样本时:

代码实现思路如下:
![]()
这里面![]() 不加带i的角标,因为他们是求和的形式
不加带i的角标,因为他们是求和的形式
![]()
![]()
![]()
![]()
![]() (这个前面用链式法则推过)
(这个前面用链式法则推过)
![]()
(这个右侧本质上加的就是某个输入的![]() ,对J求导即可,那也就是用链式法则推导,其实就是对z先求导,然后z对w求导所以出来了
,对J求导即可,那也就是用链式法则推导,其实就是对z先求导,然后z对w求导所以出来了 )
)
![]()
...
这里![]() 这些,代表的是特征的个数,例如图片识别时,每一个图片分为r,g,b三原色,每一种原色都有64×64的像素,因此在这里,
这些,代表的是特征的个数,例如图片识别时,每一个图片分为r,g,b三原色,每一种原色都有64×64的像素,因此在这里,![]() 的个数为3×64×64个
的个数为3×64×64个
如果这里x的维度n比较大,可能也需要写一个循环
对于m,是输入的个数,以图片识别为例,就是图片的张数
![]()
(z对b求偏导数是1)
![]()
![]() (前文公式可以看出来)
(前文公式可以看出来)
![]()
![]()
![]()
(梯度下降法)
使用for循环会使代码变得低效,因此我们可以用向量化来代替for循环
5.向量化
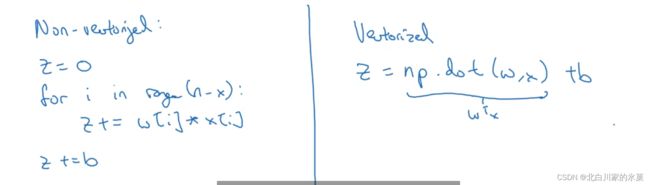
 注:在py中,可以将常数自动转化为向量,所以b可以写成常数就行
注:在py中,可以将常数自动转化为向量,所以b可以写成常数就行
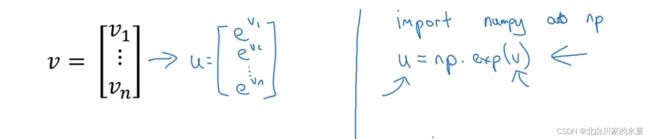
可以借此完成 函数
函数
具体代码实现大致如下,如果需要多次梯度下降迭代,还是需要循环的,但是如果一次梯度下降,就不用了
import numpy as np
X = np.mat([[1, 2, 3, 4], [1, 2, 3, 4], [1, 2, 3, 4], [1, 2, 3, 4]])
m = X.shape[1]
w = np.mat([[1], [2], [3], [4]])
Y = np.mat([0, 1, 1, 1])
b = 1
a = 0.2
for i in range(1,100000):
z = np.dot(w.T, X) + b
A = 1 / (1 + np.exp(-z))
dz = A - Y
dw = np.dot(X, dz.T) / m
db = np.sum(dz) / m
w=w-a*dw
b=b-a*db
print(w)
print(b)
print(A)最终结果如下:
![]()
可见预测还是很准确的,同时适当增大学习率能提高效率,同样是10000次循环,太小时,可能第一个预测结果为0.01,效果不如这个好
扩展:

第一句:列求和
第二句:reshape的应用
对于python,有broadcast的作用,如一个(m,n)向量,加上一个(m,1)向量,则后者自动复制自身为(m,n)
实例:
import numpy as np
m=np.mat([1,2,3])
n=np.mat([[1,2,3],[4,5,6]])
print(m+n)小技巧:为了防止broadcast造成的难以发现的错误,可以适当使用assert,来保证自己的矩阵是所需的维度,同时尽量不要用秩为1的矩阵
6.神经网络的结构
对于前文提过的logistics回归,可以理解为单神经元的一个神经网络,如下:
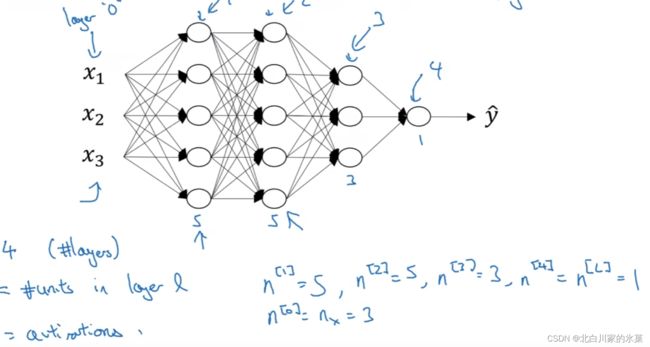
扩展到多个神经元,可以构成神经网络,结构如下:
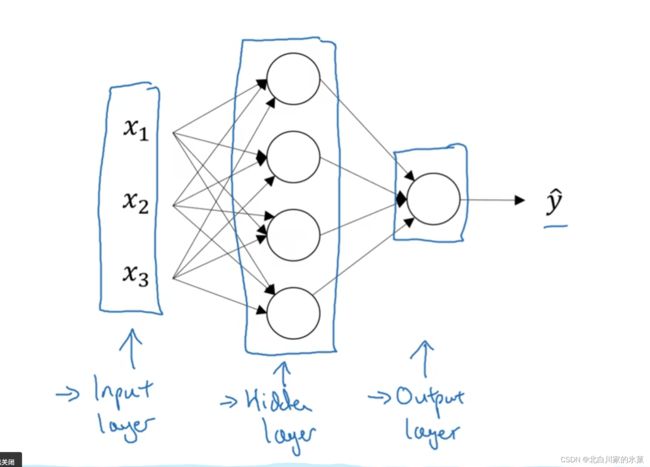
分为输入层,输出层, 隐藏层,其中输入层 是一个样本的三个特征,中间隐藏层
是一个样本的三个特征,中间隐藏层
由于输入层和输出层在训练集里有体现,而中间的隐藏层没有体现,所以叫做隐藏层
每一个层有一种特殊的表达方式,如输入层记为![a^{[0]}](http://img.e-com-net.com/image/info8/1dd736b15bef4771b30cc4dd3e3b396d.gif) ,a代表active,是激活层的意思
,a代表active,是激活层的意思
以此类推,激活层记为![a^{[1]}](http://img.e-com-net.com/image/info8/87c755b93b1b422c90d28d738001ef47.gif) ,输出层记为
,输出层记为![a^{[2]}](http://img.e-com-net.com/image/info8/cd3035674d6c430fa996ae776b58fad5.gif)
该结构有三层,但通常不算输入层,叫做 双层神经网络
对于隐藏层中,由于有很多节点,可以记作:![a^{[1]}_1,a^{[1]}_2,a^{[1]}_3](http://img.e-com-net.com/image/info8/85449952722b44f18f10204adda5bf9a.gif)
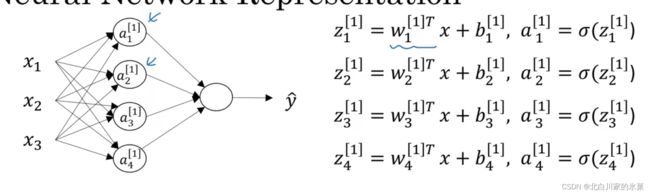
对于隐藏层,多个节点可以用一个W矩阵表示,如下:
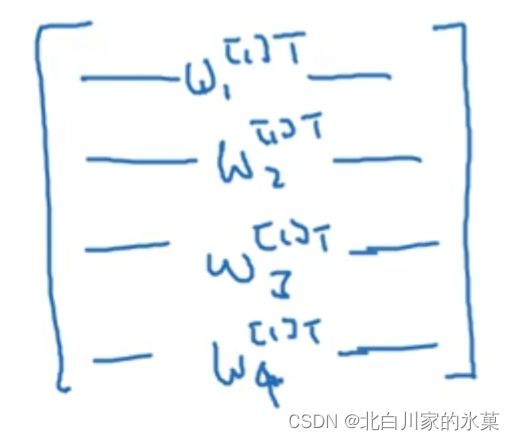
计算结果如下:
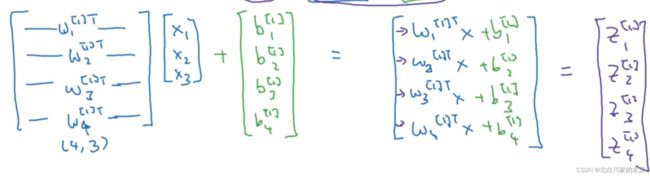

当然,如果输入样本有m个,那就把b对应的矩阵扩展就行了,别的不用动,只是输出变成m列,即多个样本的向量化如下:
右上角的圆括号表示样本的编号
向量表示为:
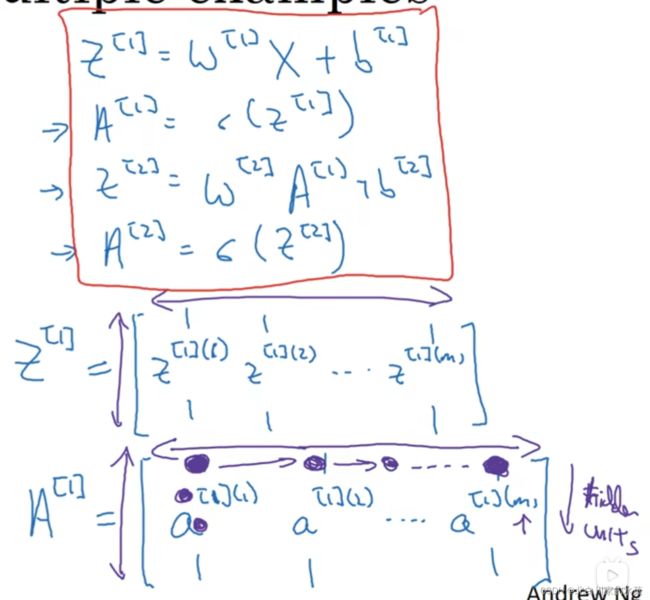
以矩阵![]() 为例,它表示的是第一层,也就是隐藏层的激活函数,横向对应统一节点不同样本,纵向是同一层同一样本不同节点
为例,它表示的是第一层,也就是隐藏层的激活函数,横向对应统一节点不同样本,纵向是同一层同一样本不同节点
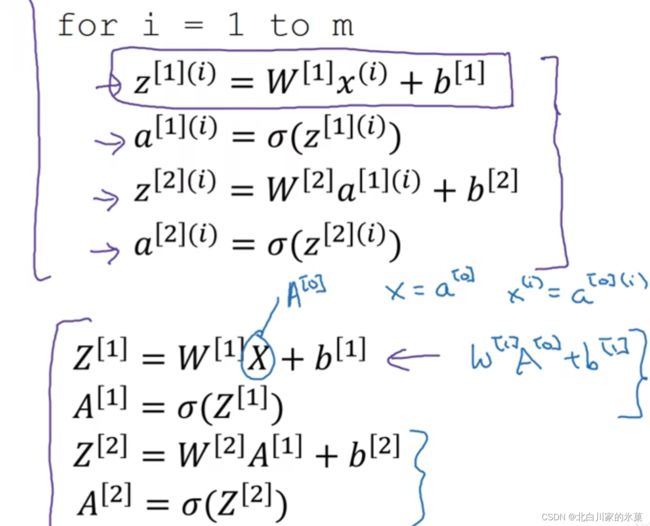
注:有的时候,由于X是输入层,也可以写作![A^{[0]}](http://img.e-com-net.com/image/info8/aedafb70e92c478d970ad66af42ed804.gif)
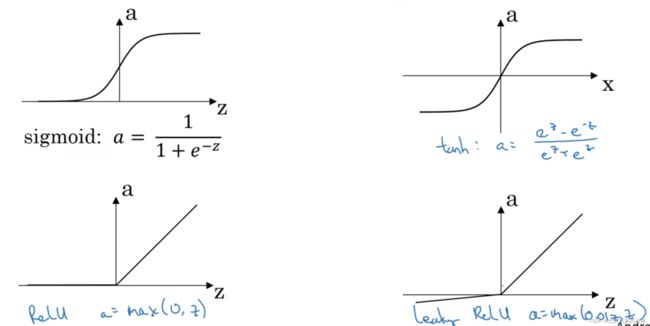
7.激活函数的选择
在前文中,我们的激活函数为函数
之后选择更加优越的函数,tanh(x)

ReLU函数:
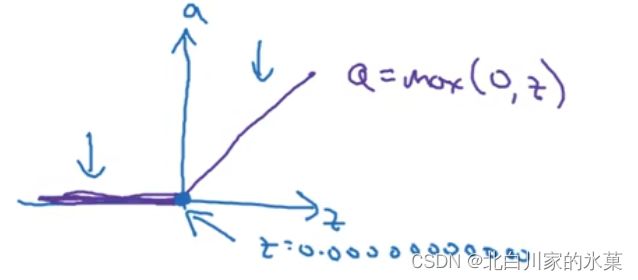
修正线性单元,不知道用什么就用他
一般地,如果我们用二类分类[0,1],我们选择函数
综上:
非线性激活函数的意义:
如果全是线性激活函数,则有:

也就是说无论累多少层,他总是相当于一层,就没意义了
8.神经网络的梯度下降
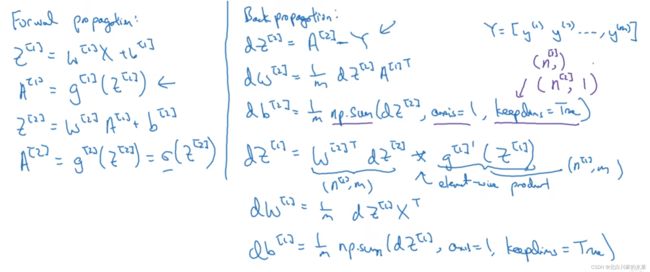
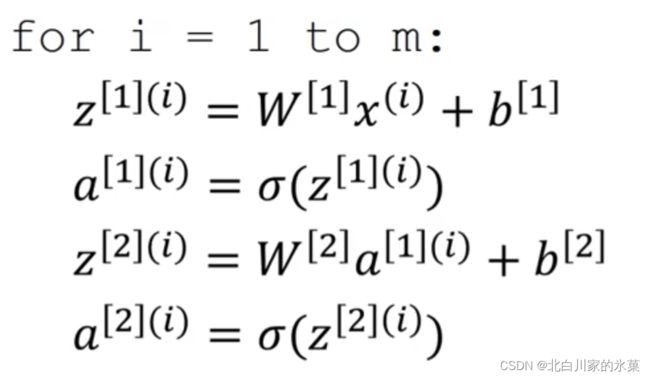
基本代码实现如图
其中第二层,即输出层,激活函数为函数
axis=1代表每一行求和,由于dz的行向代表的是m个样本,所以求和求平均合理
keepdims表示让输出为矩阵,而不是秩为1的向量
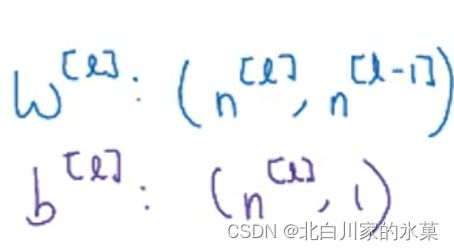
另外讨论一下矩阵相应的维度:
不妨设输入层的维度为![]()
隐藏层维度为![]()
输出层维度为![]()

注:对于这一句:

他的原理其实链式法则可以推导,但是这里注意W矩阵每一行是w的转置,所以我们要对右侧相应的也转置
设输入只有一个样本,那么
输入 维度
维度![]() ,则
,则![]() 的维度
的维度![]() ,维度为
,维度为![n^{[1]} \times 1](http://img.e-com-net.com/image/info8/e44a96b9478c4ce68653a70b1c83ff82.gif) ,
,![]() 维度
维度![n^{[2]} \times n^{[1]}](http://img.e-com-net.com/image/info8/605786fe5c764fa18276536c6282d49c.gif)
一般情况下,![]() 和
和 ,
,![]() 和
和 维度是一样的
维度是一样的
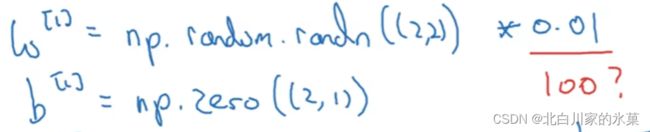
9.初始化的技巧
关于W的初始化,如果每一列的元素是相同的,由于对称性,无论训练多长时间都没有效果,所以权重的初始化应该随机初始
同时,我们希望权重W的初始化小一点,否则z太大导致初始时处于激活函数的饱和段,学习很慢
最终代码如下:
import numpy as np
import fun
X = np.mat([[1, 2, 3, 4], [2, 2, 3, 4], [6, 2, 5, 1]])
Y = np.mat([10,20, 30, 40])
#x has 3 dimensions,4 samples ,and we expect that the second layer has 5 nodes,so W is 5*3
W_1= np.random.randn(5,3)*0.01
b_1= np.random.randn(5,1)*0.01
m=X.shape[1]
W_2 =np.random.randn(1,5)*0.01
b_2 =np.random.randn(1,1)*0.01
alpha=2
for i in range (1,1000):
z_1 = np.dot(W_1, X) + b_1
A_1 = fun.leaker_Relu(z_1) # 5*4
print(A_1)
z_2 = np.dot(W_2, A_1) + b_2
A_2 = fun.leaker_Relu(z_2)
# forward process
#dz_2=A_2-Y
dz_2= np.multiply(((1-Y)/(1-A_2)-Y/A_2),fun.der_leaker_Relu(z_2))
dW_2=np.dot(dz_2,A_1.T)/m
db_2=np.sum(dz_2,axis=1)
dz_1=np.multiply(np.dot(W_2.T,dz_2),fun.der_leaker_Relu(z_1))
dW_1=np.dot(dz_1,X.T)/m
db_1=np.sum(dz_1,axis=1)
W_1=W_1-alpha*dW_1
b_1=b_1-alpha*db_1
W_2=W_2-alpha*dW_2
b_2=b_2-alpha*db_2
跑出来效果不太对,但也不知道原因,学到后面再说吧
这里欣赏一下大佬的程序,简单批注一下,回头当做模板
来源:吴恩达深度学习第一章第二周编程作业_麻衣带我去上学的博客-CSDN博客_吴恩达深度学习作业
import numpy as np
import h5py
def load_dataset():
train_dataset = h5py.File('datasets/train_catvnoncat.h5', "r")
train_set_x_orig = np.array(train_dataset["train_set_x"][:]) # your train set features
train_set_y_orig = np.array(train_dataset["train_set_y"][:]) # your train set labels
test_dataset = h5py.File('datasets/test_catvnoncat.h5', "r")
test_set_x_orig = np.array(test_dataset["test_set_x"][:]) # your test set features
test_set_y_orig = np.array(test_dataset["test_set_y"][:]) # your test set labels
classes = np.array(test_dataset["list_classes"][:]) # the list of classes
train_set_y_orig = train_set_y_orig.reshape((1, train_set_y_orig.shape[0]))
test_set_y_orig = test_set_y_orig.reshape((1, test_set_y_orig.shape[0]))
return train_set_x_orig, train_set_y_orig, test_set_x_orig, test_set_y_orig, classes这里面 .h5文件能对数据集进行响应的标注,对应的元素据我理解应该是一个类似字典的东西,所以输入字符串可以取到相应值
classes指cat 和 non-cat
train_set_y_orig = train_set_y_orig.reshape((1, train_set_y_orig.shape[0]))
test_set_y_orig = test_set_y_orig.reshape((1, test_set_y_orig.shape[0]))这两段表示的是把原来的向量搞成矩阵
import numpy as np
class SimpleLogistic(object):
def __init__(self, dim, learning_rate, num_iterations):
"""
初始化逻辑回归模型
:param dim: 输入向量的维度
:param learning_rate: 梯度下降的学习率
:param num_iterations: 梯度下降迭代次数
"""
self.dim = dim
self.learning_rate = learning_rate
self.num_iterations = num_iterations
self.w = np.zeros(shape=(self.dim, 1))
self.b = 0
def sigmoid(self, z):
"""
:param z: 任何大小的标量或数组
:return: sigmoid(z)
"""
return 1 / (1 + np.exp(-z))
def propagate(self, X, Y):
"""
实现前向和后向传播的成本函数及其梯度
:param X:矩阵类型为(num_px * num_px * 3,训练数量)
:param Y:真正的“标签”矢量(如果非猫则为0,如果是猫则为1),矩阵维度为(1,训练数据数量)
:return:
grads -梯度计算结果
cost -损失函数的结果
"""
m = X.shape[1]
# 正向传播
A = self.sigmoid(np.dot(self.w.T, X) + self.b)
cost = (-1 / m) * np.sum(Y * np.log(A) + (1 - Y) * (np.log(1 - A)))
# 反向传播
dw = (1 / m) * np.dot(X, (A - Y).T)
db = (1 / m) * np.sum(A - Y)
assert (dw.shape == self.w.shape)
assert (isinstance(db, float) or isinstance(db, int))
cost = np.squeeze(cost)
assert (cost.shape == ())
grads = {
"dw": dw,
"db": db
}
return grads, cost
def optimize(self, X, Y, print_cost=False):
"""
通过梯度下降算法来优化w和b
:param X:维度为(num_px * num_px * 3,训练数据的数量)的数组。
:param Y:真正的“标签”矢量(如果非猫则为0,如果是猫则为1),矩阵维度为(1,训练数据的数量)
:param num_iterations:优化循环的迭代次数
:param learning_rate:学习率
:param print_cost:每一百步打印损失值
:return:
"""
costs = []
for i in range(self.num_iterations):
grads, cost = self.propagate(X, Y)
dw = grads["dw"]
db = grads["db"]
self.w = self.w - self.learning_rate * dw
self.b = self.b - self.learning_rate * db
if i % 100 == 0:
costs.append(cost)
if print_cost and (i % 100 == 0):
print("迭代的次数: %i , 误差值: %f" % (i, cost))
grads = {
"dw": dw,
"db": db}
return grads, costs
def predict(self, X):
"""
使用学习逻辑回归参数logistic (w,b)预测标签是0还是1
:param X:维度为(num_px * num_px * 3,训练数据的数量)的数据
:return: Y_prediction - 包含X中所有图片的所有预测【0 | 1】的一个numpy数组(向量)
"""
m = X.shape[1]
Y_prediction = np.zeros((1, m))
w = self.w.reshape(X.shape[0], 1)
# 预测猫在图片中的概率
A = self.sigmoid(np.dot(w.T, X) + self.b)
for i in range(A.shape[1]):
Y_prediction[0, i] = 1 if A[0, i] > 0.5 else 0
assert (A.shape == (1, m))
return Y_prediction
def model(self, X_train, Y_train, X_test, Y_test, print_cost=True):
"""
构建逻辑回归模型
:param X_train:numpy的数组,维度为(num_px * num_px * 3,m_train)的训练集
:param Y_train:numpy的数组,维度为(1,m_train)(矢量)的训练标签集
:param X_test:
:param Y_test:
:param num_iterations:
:param learning_rate:
:param print_cost:
:return:
"""
assert (self.w.shape == (self.dim, 1))
assert (isinstance(self.b, float) or isinstance(self.b, int))
grads, costs = self.optimize(X_train, Y_train, print_cost) # 模型训练
# w, b = params['w'], params['b']
Y_prediction_test = self.predict(X_test)
Y_prediction_train = self.predict(X_train)
print("训练集准确性:", format(100 - np.mean(np.abs(Y_prediction_train - Y_train)) * 100), "%")
print("测试集准确性:", format(100 - np.mean(np.abs(Y_prediction_test - Y_test)) * 100), "%")
d = {
"costs": costs,
"Y_prediction_test": Y_prediction_test,
"Y_prediciton_train": Y_prediction_train,
"w": self.w,
"b": self.b,
"learning_rate": self.learning_rate,
"num_iterations": self.num_iterations}
return d
assert (dw.shape == self.w.shape)
assert (isinstance(db, float) or isinstance(db, int))注意assert使用,尤其第二个用法,可以保证防止出现non
import numpy as np
import matplotlib.pyplot as plt
from lr_utils import load_dataset
from simple_logistic import SimpleLogistic
def data_preprocess():
"""
数据预处理
:return:
train_set_x -训练集(12288,209)
train_set_y -训练集标签(1,209)
test_set_x -测试集(12288,50)
test_set_y -测试集标签(1,50)
"""
# 获得训练集209条数据和测试集50条数据
train_set_x_orig, train_set_y, test_set_x_orig, test_set_y, classes = load_dataset()
plt.imshow(train_set_x_orig[27])
plt.show()
# 每一张图片是64*64*3(这里的64*64表示像素点个数,3表示每个像素点由RGB三原色构成),将其转换成列向量
train_set_x_flatten = train_set_x_orig.reshape(train_set_x_orig.shape[0], -1).T # 得到训练集输入数据,维度为(64*64*3,209)
test_set_x_flatten = test_set_x_orig.reshape(test_set_x_orig.shape[0], -1).T # 得到测试集输入数据,维度为(64*64*3,50)
# RGB的取值为(0,255),需要将数据进行居中和标准化,将数据集的每一行除以255(一般是将每一行数据除以该行数据的平均值)
train_set_x = train_set_x_flatten / 255
test_set_x = test_set_x_flatten / 255
return train_set_x, train_set_y, test_set_x, test_set_y
if __name__ == '__main__':
train_set_x, train_set_y, test_set_x, test_set_y = data_preprocess()
dim = train_set_x.shape[0]
learning_rate = 0.005
num_iterations = 2000
logistic = SimpleLogistic(dim=dim, learning_rate=learning_rate, num_iterations=num_iterations)
result = logistic.model(train_set_x, train_set_y, test_set_x, test_set_y)
costs = np.squeeze(result['costs'])
plt.plot(costs)
plt.ylabel('cost')
plt.xlabel('iterations (per hundreds)')
plt.title("Learning rate =" + str(result["learning_rate"]))
plt.show()10.深层神经网络
① 深层神经网络概念
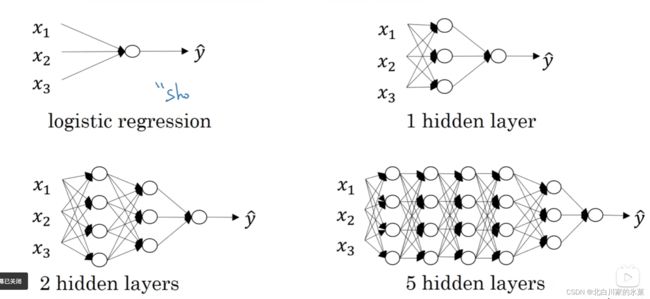
注:只算隐藏层
对于不同层,有:
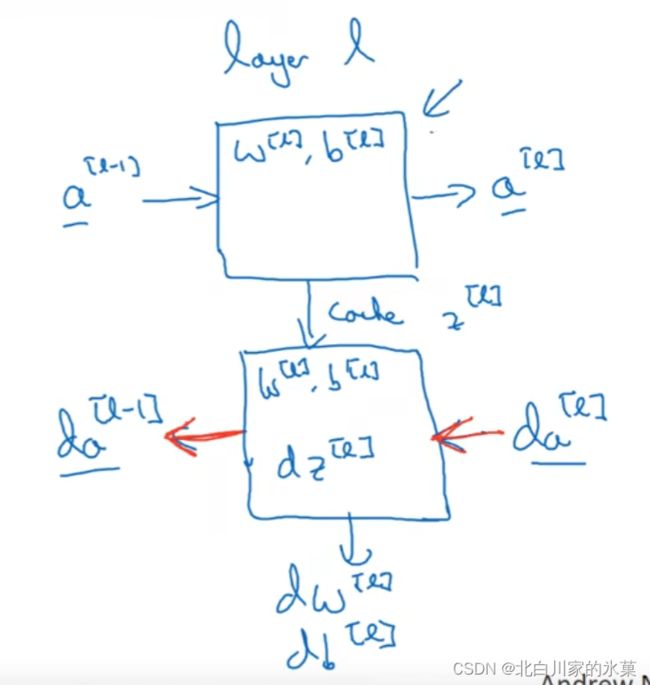
对于第l层,有:
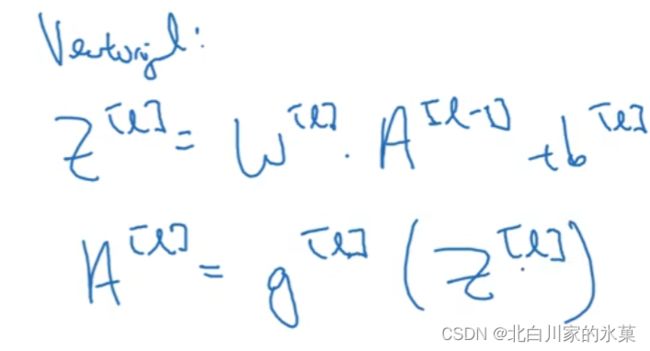
正向:
输入:![a^{[l-1]}](http://img.e-com-net.com/image/info8/69ca71e59dea4f6dacc9be3524d0378f.gif) 输出:
输出:![a^{[l]}](http://img.e-com-net.com/image/info8/282f437a3b364e72b51add2532e2ea27.gif) 存储 cache(
存储 cache(![z^{[l]}](http://img.e-com-net.com/image/info8/2b875c684b2b41a0aefd5bc2aada5fdb.gif) ,还有
,还有 )
)
反向:


写成向量形式如下:
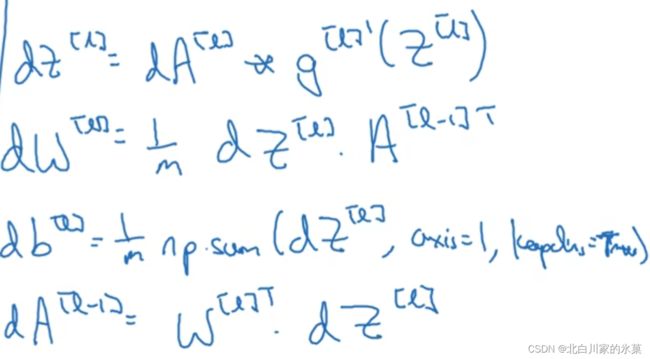
注意,对于dA,我们要这么计算:

总结如下:
② 深层网络的前向传播
对于向量化:
for i in range(1,4)
![]()
![]()
![]()
注:检查矩阵维度规律:

如果是多个样本,那么b的列数变多为m
③ 超参数
如:学习率,层数,每层节点数,这些能直接控制W和b,所以叫超参数
三、神经网络的运行
1.数据数量的分配
训练集:用来学习的样本集,用那个与分类器参数的拟合,一般为60%
验证集:用来调整分类器的超参数的样本集,如调整神经网络中隐藏层的神经元个数,20%
测试集:用于评估训练好的分类器的性能,20%
但是在数据量巨大时,一般为98%,1%,1%
有时没有测试集,也没有关系,但是就不能提供无偏性能评估
2.偏差和方差

从左到右依次为:欠拟合,适度拟合,过拟合
对于训练集和验证集,如果训练集误差较小,但是验证集误差较大,这说明我们过拟合了训练集,这种情况叫做”高方差“
若训练集错误率较高,验证集错误率也较高,但不显著高于训练集,则叫做欠拟合,这种情况为”高偏差“
若训练集的错误率较高,验证集错误率也很高,显著高于训练集,此时情况最糟糕,为高偏差且高方差
如果偏差很大(high bias),那么应该尽可能地扩大网络规模,使用更合理的模型,但是扩大训练集的规模没有什么用,应该修改到可以拟合训练集为止。
如果方差很大(high variance),那么可以才更多数据,如果不能,可以通过正则化减轻过拟合
3.正则化(regulazation)
解决高方差的两个方法:正则化,准备更多数据
①  正则化
正则化

其中![]() 为范数,又可以表示为
为范数,又可以表示为
这种正则化又叫正则化,后面也可以加一个b的范数但是用处不大
同时还有 正则化:
正则化:
如此正则化的w会更加稀疏,会有更多的0存在,据说可以节省存储空间,但是目前,还是更加倾向于
 成为正则化参数,也是一个超参数
成为正则化参数,也是一个超参数
对于多层的网络:

一般地,我们又叫这种范数为弗罗贝尼乌斯范数(Frobenius norm)
加入了正则化后,梯度下降变成:
![dw^{[L]}=\frac{\partial J}{\partial w^{[L]}}+\frac{\lambda}{m}w^{[i]}](http://img.e-com-net.com/image/info8/8e92059b4e134705ae683a6062b2b340.gif)
![]()
这种方法又叫权重衰减
原理:
当特别大时,权重W可以忽略不计,如果认为是0,那么相当于整个网络去复杂化,减小对训练集的依赖程度,只是变成了一个具有深度的logistics模型
那么此时我们认为他从过拟合到欠拟合过渡,过拟合度变小
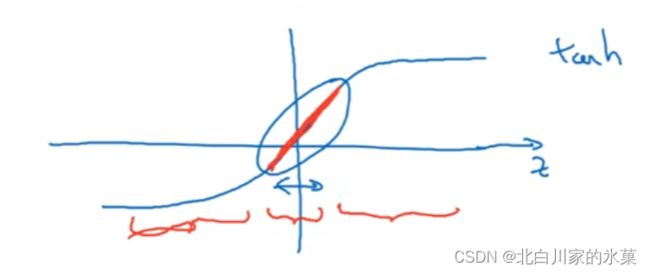
用tanh理解的话,其实如果特别大,W相对小,则z相对小,处于tanh线性部分,相当于几个线性函数相连接,所以减小了方差
② dropout 正则化
i.反向随机失活
随机选择这一层中一些节点,让他们失效,比如,keep-prob=0.8,那么就是舍弃0.2的
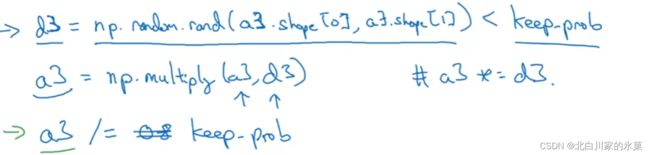
最后一步除概率的原理是,由于神经元减少了20%,为了保证z的期望不变,那么a的大小应该变大一些
dropout 的一个原理就是随机的丢弃一层里的某些神经元,由于对于每个神经元的机会都是公平的,因此一定程度上消除了某个神经元权重过大的影响
一般地,我们给输入层的keep-prob都是1或者0.9
同时,dropout 一般只在训练时使用,不在验证时使用,即一般验证时keep-prob为1
缺点:cost function J的定义不再明确
③ 其他正则化方法
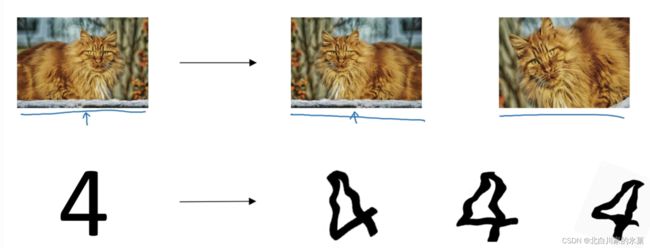
I.图像处理时,我们可以对图像进行响应的旋转,裁剪,扭曲变形等操作
ii.early stopping
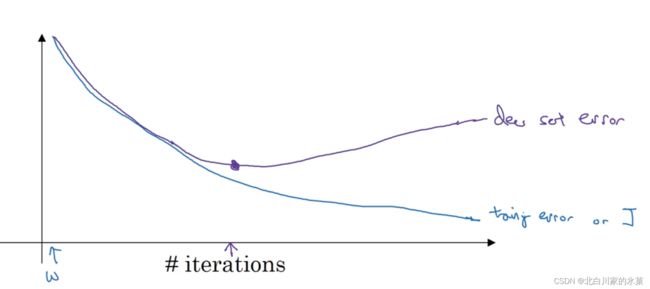
在中间停止,我们可以获得一个w的中等大小的弗罗贝尼乌斯范数,防止过拟合
但是缺点时J取得的不是最小值
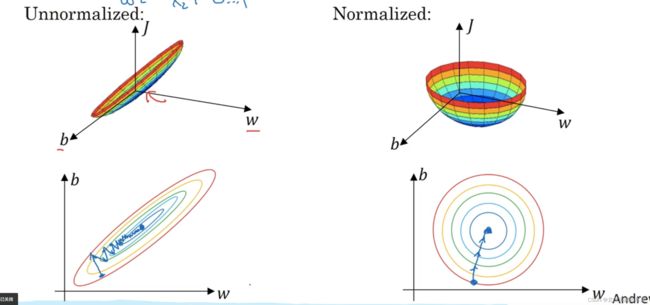
4.归一化输入
先零均值鉿,再归一化,如图

归一化的好处:
使代价函数更加平均,更加利于使用梯度下降法,否则必须要用很小的学习率
5.梯度消失和梯度爆炸(vanishing / exploding gradients)
产生原因:
若W中元素略大于1,则指数爆炸;若小于1,则指数衰减
解决方案:权重初始化的选择

n越多时,我们期望 越小,
越小,

对于Relu ,我们选择最后乘以图片中的
对于其他函数:
tanh:
![]() 或者
或者 ![]()
6.梯度检验
一般地,由双边公差估计出来的梯度比单边更准确,以图为例,大三角形的梯度比小三角形的梯度更接近中间点处的导数
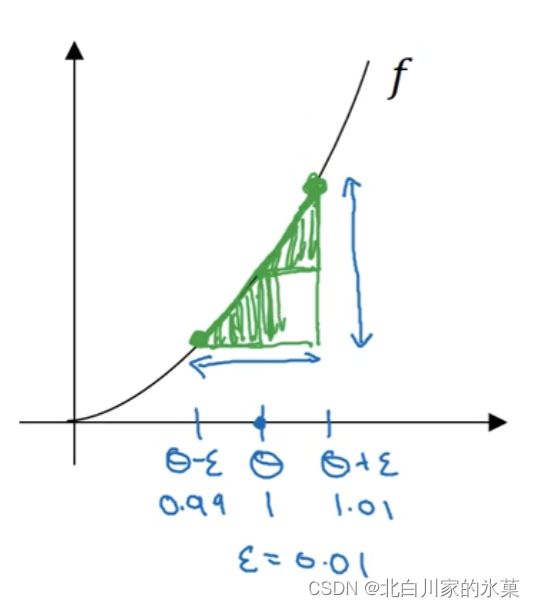

梯度检验的作用:检测反向传播过程中的bug
![]()
重塑一个向量
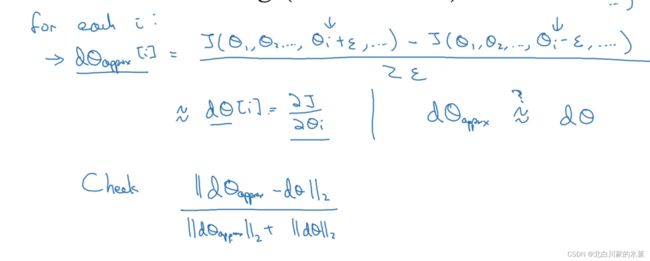
除以向量的欧几里得范数的原因:进行归一化,防止过大或者过小
一般地, 为
为 左右时,偏差应该在左右,如果在
左右时,偏差应该在左右,如果在 ,基本可以确定出bug了
,基本可以确定出bug了
四、神经网络的优化算法
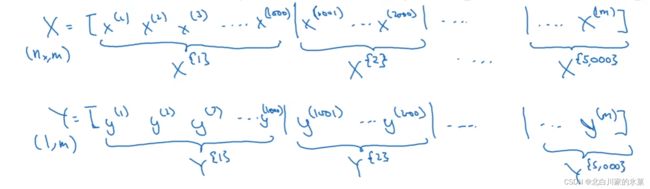
1.minibatch梯度下降法
当样本数m很大时,尽管我们使用了向量代替循环,但是处理速度依旧很慢
处理方法可以是攒出一个一个的小集合
这个的一个基本原理是:
正常情况下,比如训练集有1亿个数据,过去我们是把这一亿个数据全放进去,然后进行训练,一遍一遍训练
而这次,我们可以一次拿出100个数据,当成一个新的数据集,进行训练,然后不断进行第二组,第三组等等的训练。
例如我们把100万样本分成1000份, 每份1000个样本, 这些子集就称为mini batch。然后我们分别用一个for循环遍历这1000个子集。 针对每一个子集做一次梯度下降。 然后更新参数w和b的值。接着到下一个子集中继续进行梯度下降。 这样在遍历完所有的mini batch之后我们相当于在梯度下降中做了1000次迭代。
我们将遍历一次所有样本的行为叫做一个 epoch,也就是一个世代。 在mini batch下的梯度下降中做的事情其实跟full batch一样,只不过我们训练的数据不再是所有的样本,而是一个个的子集。 这样在mini batch我们在一个epoch中就能进行1000次的梯度下降,而在full batch中只有一次。 这样就大大的提高了我们算法的运行速度。
因此,每次迭代他相当于用的不同的训练集,训练结果和batch法对比如下:
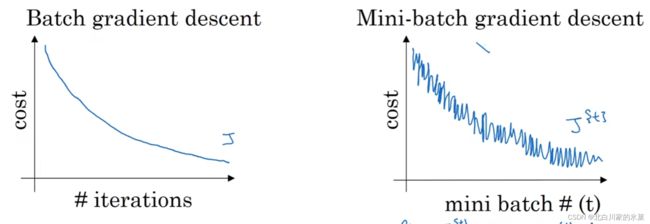
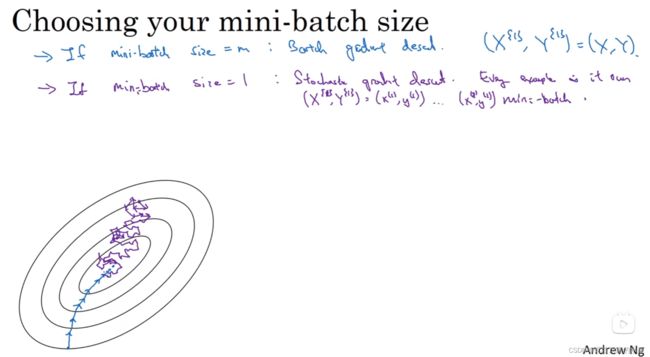
mini-batch的两种极端:
当batch大小为m时,就是传统的batch法,当大小为1时,叫做随机梯度下降,这种方法只能在最小值附近震荡,而永远不能收敛
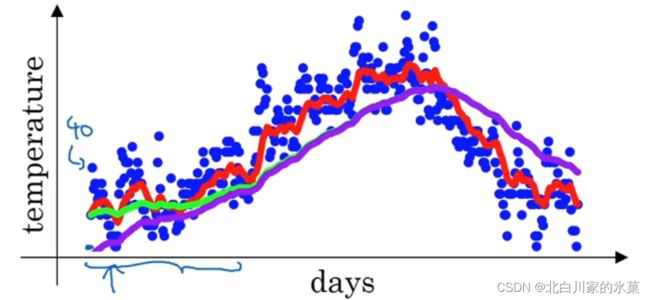
2.指数加权平均
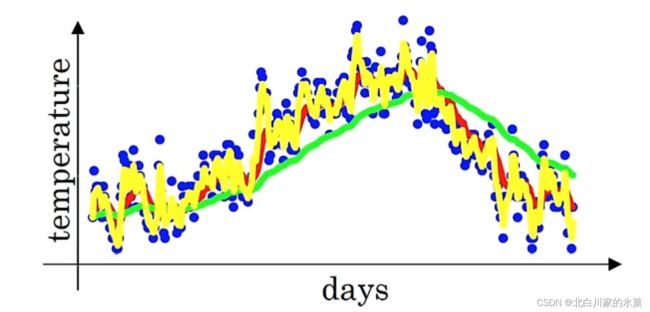

 的大小决定了所得的曲线的平滑程度,实际上,其影响的是实际上求得是多少天的均值
的大小决定了所得的曲线的平滑程度,实际上,其影响的是实际上求得是多少天的均值

=0.9为图中的红线,对原始数据有一定的平滑处理
=0.98为图中绿线,相当于求了50天的平均值,这时曲线非常平滑,噪声很小,但是一时趋势的变化对整体曲线变化影响不大,因此存在延迟
=0.5是图中的黄线,噪声较大
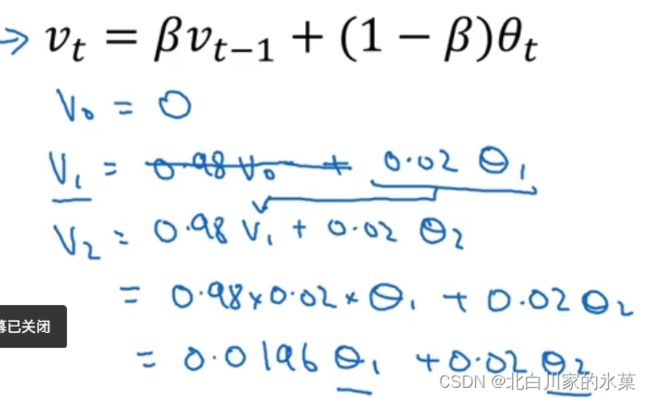
原理:

迭代:

根据 ,当
,当![]() 到达10,可以认为该相权重降为了原来的三分之一,影响较小,所以可以解释为什么↓
到达10,可以认为该相权重降为了原来的三分之一,影响较小,所以可以解释为什么↓
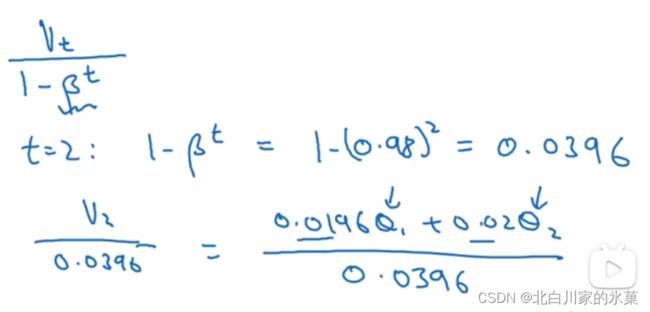
修正前几个算的不准的问题:
如图,若=0.98,数据其实应该是紫色的线:
原因:
解决方案:误差修正
3.动量梯度下降法
核心思想:计算梯度指数加权平均数,利用该梯度更新权重

注:在文献中,常常用作:
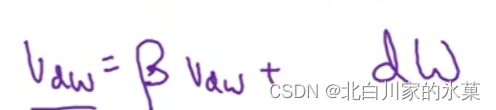
效果依旧不错,同时这个东西只对学习率有影响
4.RMSprop(root mean square prop)
原理:减缓b轴的学习降速度,同时提高w轴收敛速度

我们希望![]() 大一点,这样b方向的摆动就变小了,结果如蓝色线
大一点,这样b方向的摆动就变小了,结果如蓝色线

一般地,为了防止分母为0,我们给分母加一个极小的值,如![]()
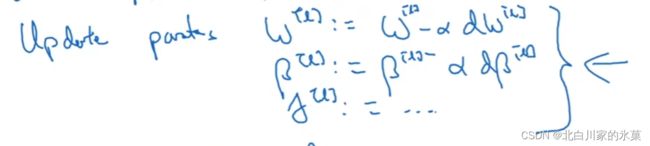
5.Adam(adaptive moment estimation)优化算法(融合了动量梯度下降法和RMS)
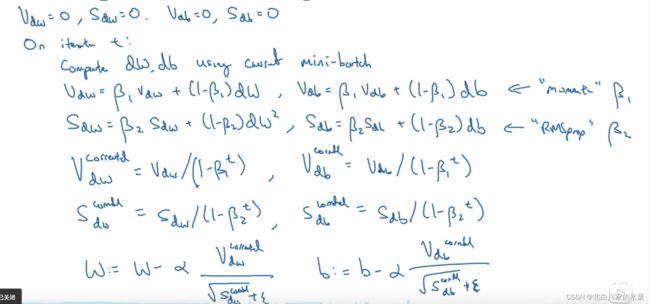
参数选择:

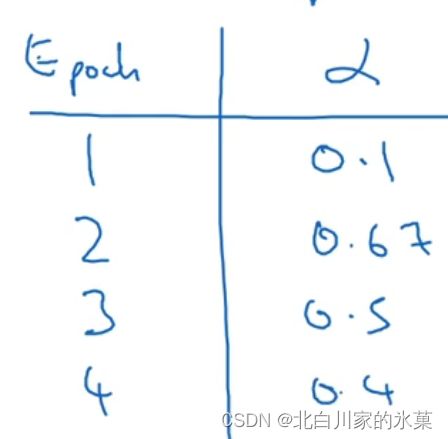
5.学习率衰减(learning rate decay)
①
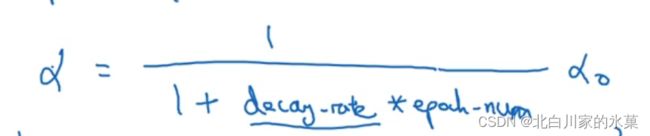
例如 ![]()
则:
② 指数衰减
![]()
③
![]()
6.局部最优
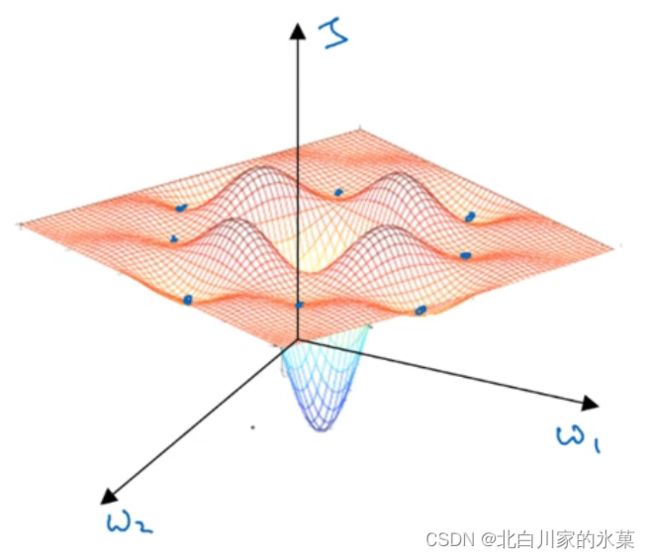
在高维度空间中,我们更容易碰到鞍点,而不是局部最优,如图:
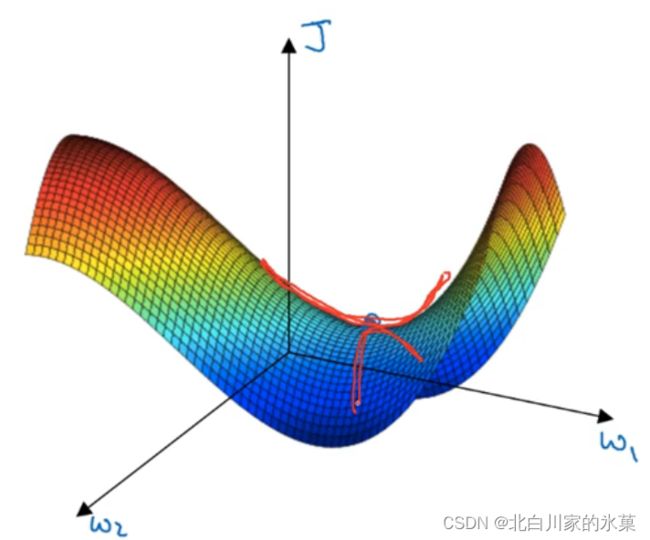
对于神经元很多的网络,维度很大,更容易出现鞍点
平缓段梯度很小,使得学习很慢:使用momentum等算法
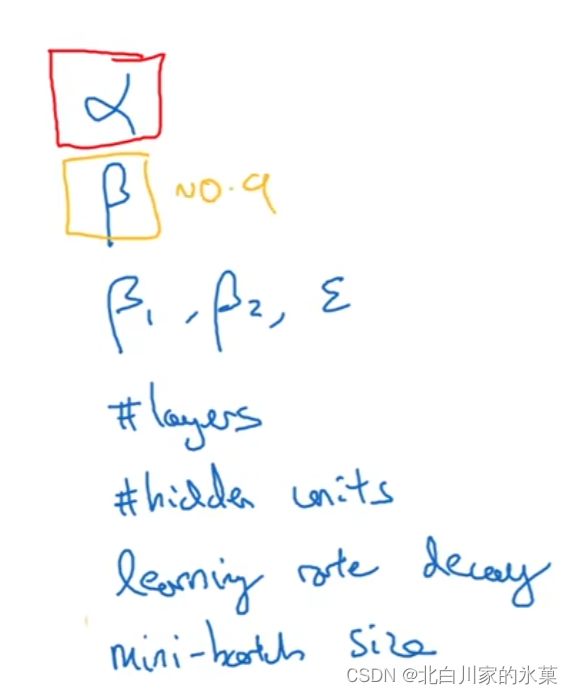
五、参数的调试处理
1.一般需要调试处理的超参数
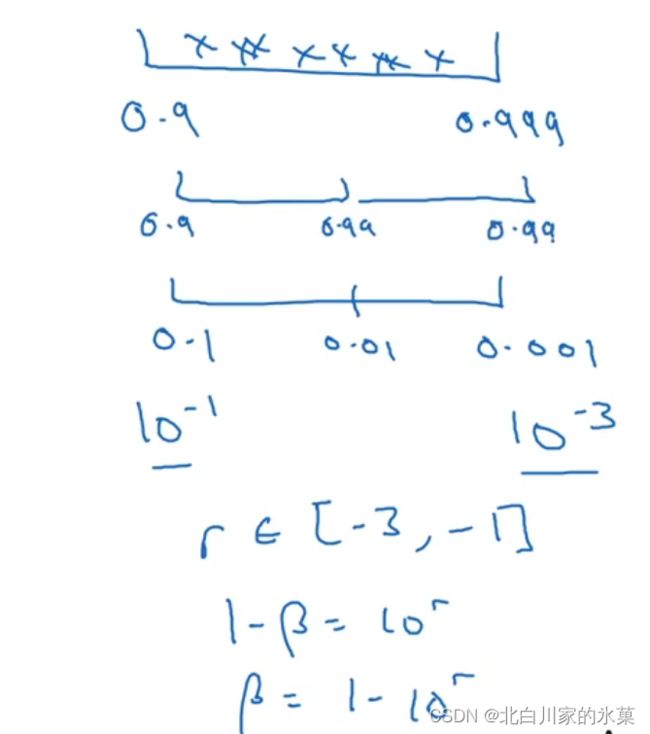
2.为超参数提供范围
一般地,如果我们知道一个参数的范围,我们可以在该范围内均匀取值,但是有些情况并不适合均匀取值,例如:
e.g
我们期望取0.0001到1之间,如果均匀分布,对于0.0001和0.1之间只有10%,太不公平了,所以我们要用对数标

e.g.

两种不同的测试方法,取决于计算能力

左:精调一个模型 右:同时训练多个模型,选择最好的
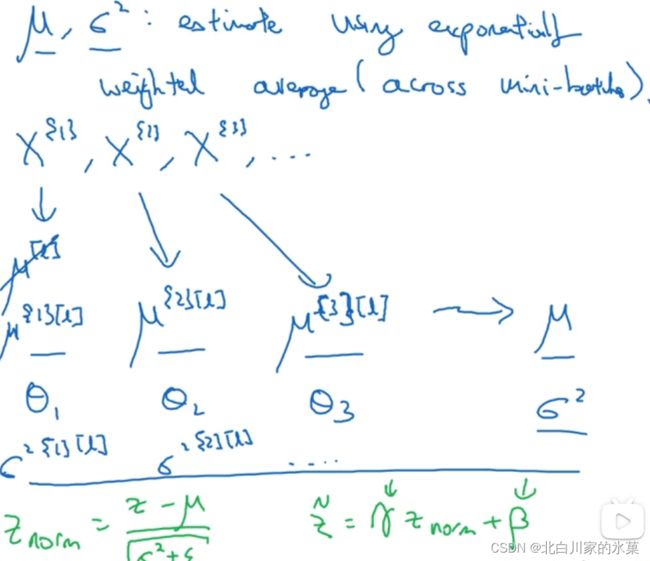
3.正则化网络的激活函数(batch norm)
一般地,我们会去正则化z

这里我们对![]() 做梯度下降
做梯度下降
在前文我们是对x输入进行正则化,而这里我们对中间隐藏层也进行正则化
总之,步骤总结如下:
1)求出来每一行的z的均值
2)求出来每一行的方差σ
3)得到归一化的z,此时的均值为0,方差为1(前三步也就是按照行进行正则化)
4)使用![]() 和
和![\gamma^{[i]}](http://img.e-com-net.com/image/info8/d60aea94857f4aceb67434e5f0cde602.gif) 将
将![]() 调整为
调整为![]()
本质作用是任意地调节z的方差和均值,通过![]()
总结,整体过程如下:

(注:这里的和前面动量下降法不是一个东西)
特别注意:在使用BN的时候,由于其中的归一化会去均值,所以实际上+b就没啥用了,所以我们不妨可以把![b^{[l]}](http://img.e-com-net.com/image/info8/579a07b5e259477b8c159f1a38d5e492.gif) 设成0
设成0
 (最后一个是
(最后一个是 不是A)
不是A)
BN为什么有效?
① 使隐藏层对前一层的权重变化有更大的鲁棒性
如果对于一个神经网络而言,输入有变化,可能出现 covarite shift现象
如图,如果一开始猫是用黑猫训练的,但是后来测试用的是其他颜色的猫,就会发生这种现象,这时我们需要重新训练模型
对于一个神经网络其实也是如此,当前一层的权重变化时,前一层的输出,即后一次的输入也会变化,这就会导致covarite shift现象
BN强制限制了每一层输出的方差和均值,这样就限制了权重影响数值分布的程度,或者可以理解为减轻了前后两层参数的耦合程度
② 有正则化的作用
这个操作对引入了一定的噪声,有正则化的作用,可以配合dropout防止过拟合
在测试时,我们需要逐个使用样本,而不能像minibatch一样把整体数据带进去,所以算平均值和方差有特别的方法
对于某一层,每个minibatch一定都有这一层,算每个minibatch的平均值,得到,对这些进行加权平均,算均值和方差
4.softmax回归(多种分类)
处理方法:
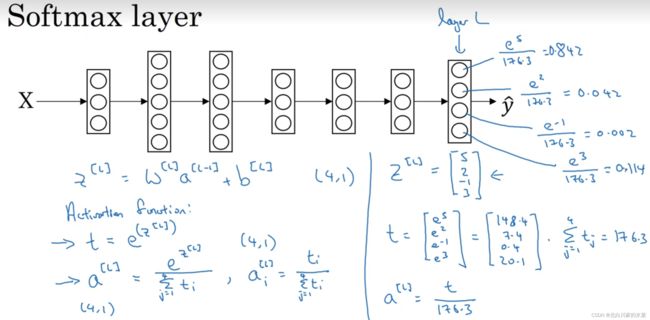
总之就是先求指数,再归一化,激活函数是指数函数
损失函数:


![]()
5.深度学习框架
常见框架:

例:tensorflow例程

六、机器学习的策略
1.正交化
通俗理解就是使输入量和输出量一一对应,不同输入量之间没有耦合关系
如:电视机图像的调整

对于神经网络模型:
训练集表现不好:① 使用更大的网络 ② 更换算法,如Adam
试验集表现不好:使用更大的训练集,或者正则化
测试集表现不好:使用更大的试验集
真实世界表现不好:改变测试集或代价函数
2.单一数字评估指标(评估模型好坏)
e.g.

precision:给一张图片,让机器识别是不是猫,看他识别正确率(查准率)
recall:给机器看全是猫的图片,看看他能识别出几个猫(查全率)
在这种情况下,我们难以抉择出那个是最好的
因此,可以提出一个折中二者的参数,如F1 Score
![]()

二中指标不是同类
准确率成为 optimizing ,越高越好,而 running time 称为 satisfying ,必须满足
当运行时间大于100ms时,必须淘汰
其他时候,可以计算加权平均,如:

2.训练-开发-测试集的划分
开发集和测试集:影响最终的目标(当然影响因素还有评估指标),我们在对数据分组时,不能一类给开发集,一类给测试集,而是应该将各类混杂,然后均匀分给两个集合
测试集:评估系统整体性能,因此不需要上百万个例子
训练集:一般是70%,但是在大数据时代,可能后二者不需要那么多,可能训练集占98%
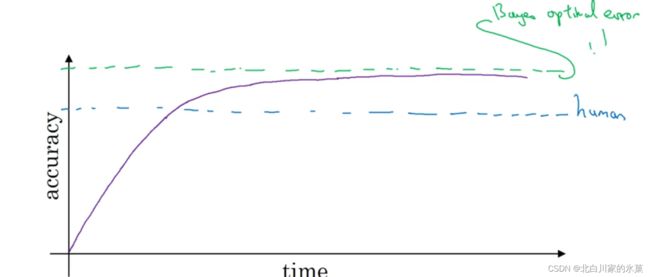
贝叶斯最优错误率:理论上可能达到的最优错误率,使用的是x到y映射的最优函数
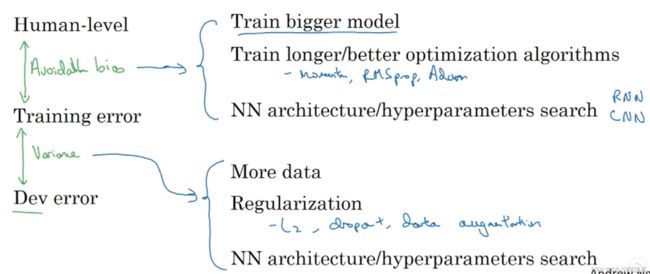
3.可避免偏差
贝叶斯误差与训练误差之间的差值成为可避免误差
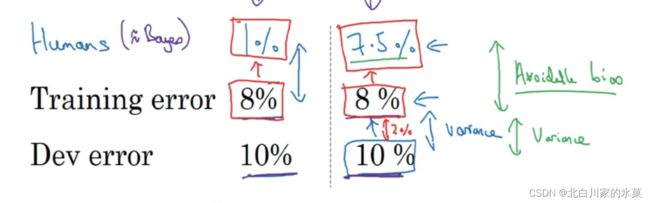
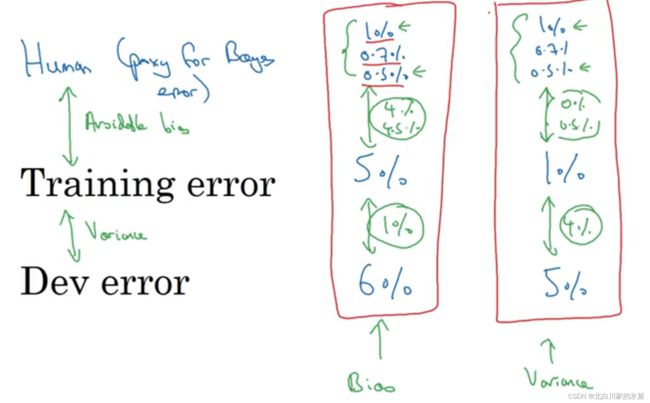
左边是测试集和训练集之间的差距比可避免误差大,因此左边主要侧重于偏差,我们应该提高训练质量
右边是测试集和训练集之间的差距较小,因此右边侧重方差,应该进行正则化等
总结:
4.错误分析
如果在识别猫的过程中,出现10%错误
在错误中,5%是识别成了狗,那么我们不值得去为了它重新训练模型
但是如果50%的错误都是识别成了狗,我们可以花时间让模型能够识别狗,以降低50%错误率
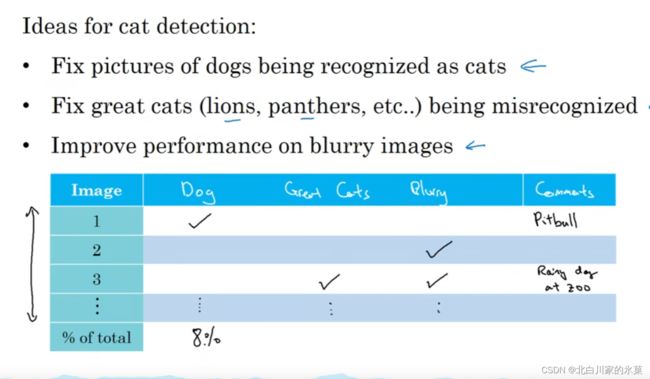
如图,可以统计各个因素对误差的贡献度,选择高优先级的任务
5.标签的更改
可能是因为做标记的人的疏忽
① 若总体的数据集足够大,那么实际错误率并不会太高
机器学习对随机误差十分具有鲁棒性,但是对系统误差鲁棒性较差
比如我偶然把一张狗当成猫,这个没有问题,但是如果我把所有白狗都当成猫,这个就会产生问题
有时,标签的修正更侧重于测试集和开发机,而不是训练集
6.不匹配数据划分的偏差和方差

如果训练集和开发集来自同一分布,则说明方差太大,不稳定,可以正则化等处理
如果训练集和开发集不来自同一分布,可能有两种原因
① 算法只见过训练集数据,没见过开发集数据
② 开发集数据来自不同的分布
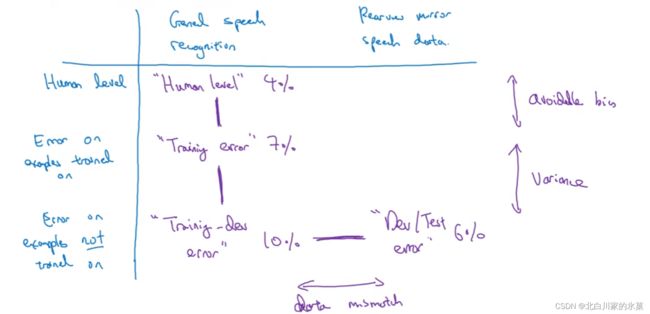
弄清是怎么回事:
建立训练-试验集,此时训练集和训练-试验集来自同一分布,试验集和测试集来自同一分布
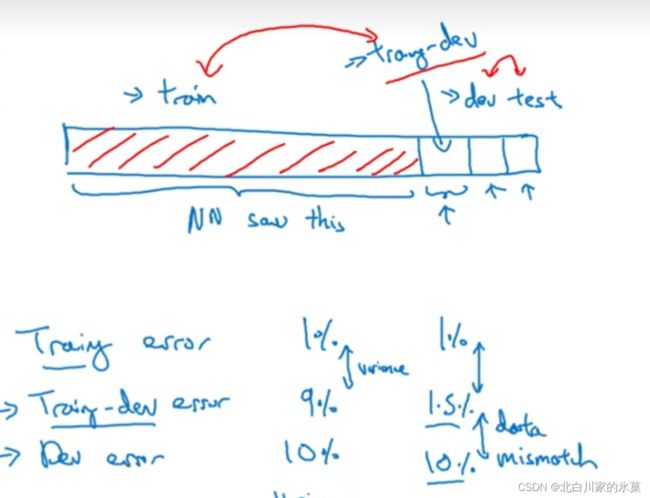
在左边这种情况下,我们可以认为是存在方差问题
在右边这种情况下,是data dismatch问题,也就是模型不认识dev set的数据
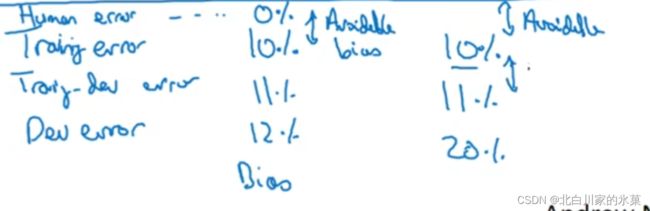
最后一种情况,显然这是欠拟合,所以是可避免的误差
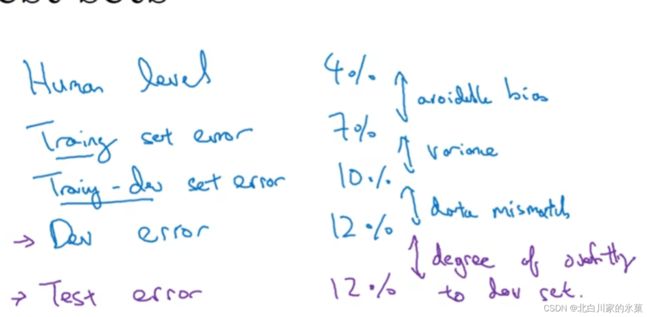
从上到下依次为:
可避免误差,方差,数据不匹配,过拟合
实:
解决数据不匹配的方法:
① 分析训练集和试验集的区别,让训练集尽量和试验集相似

② 人工合成数据

注:如果第一个特别长(10000h),第二个较短(100h),可以循环播放车载噪音,但是这样的话可能会导致过拟合
6.迁移学习与多任务学习
使用例:
如果对于一个图像识别网络,他有10000个数据用于训练。我们希望对这个网络复用,去进行x光图像识别,但x图像只有100个,那么我们就应该改变输出层,可能会加上一些层,来使该模型能识别x光图像
当然,如果x光样本足够多,可以重新训练2
多任务学习:
比如一个图片中有许多要素需要我们去学习,如一个图片里需要识别行人,交通灯,车辆等,我们需要有多个输出,一个图片也要有多个标签
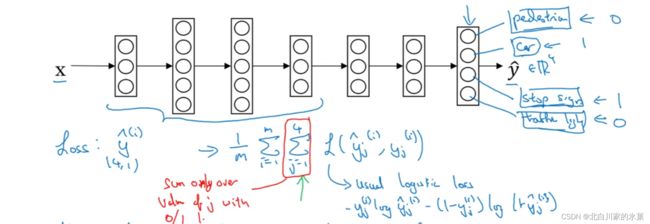
这里和前面学过的softmax要区分,softmax是所有的概率加一起必须为1,比如一个东西有0.8概率为苹果,0.1概率为柿子,0.1概率为梨,但是这里可以一个图片有很多的1
同时,假如一个图片里只有行人和交通灯,别的没标,那么也没事,在标签矩阵中把没标的存疑,之后用图片中公式求cost 函数时,只求和标出来的就行了
7.端对端深度学习
当数据量较少(或正常),我们通常用传统流水线方法,如图:

但是当数据量十分庞大,我们可以使用端对端方法,这个方法省去了中间的流水线,而且表现的似乎会更好!
当然在端对端中间,我们可以加入部分流程,虽然不是完整的端到端,但是也是其中的一步