ROS自学实践(9):TF坐标变换实例解析
一、前言
在进行SLAM建图或者自动驾驶系统开发的时候,往往需要多个传感器,比如激光雷达、相机、毫米波雷达、里程计等等,由于机器人本身具有自己的坐标系,每个传感器又有自己的坐标系,在建图的时候还涉及世界坐标系,了解各个坐标系之间的转换至关重要,ROS给我们提供了一个很好的坐标变换工具——TF包,下面简单介绍一下相关的使用。
二、TF简介2
基本数据类型:
数据类型定义在tf/transform_datatypes.h中
| 类型 | TF |
|---|---|
| Quaternion | tf::Quaternion |
| Vector | tf::Vector3 |
| Point | tf::Point |
| Pose | tf::Pose |
| Transform | tf::Transform |
三、建立ROS实验包
1.创建ROS包
mkdir -p tf/src
cd tf/src
catkin_create_pkg mytftest roscpp tf geometry_msgs
cd ..
catkin_make
2.新建tf_broadcaster.cpp,发布坐标变换
#include 修改CmakeLists.txt文件:
add_executable(tf_broadcaster src/tf_broadcaster.cpp)
target_link_libraries(tf_broadcaster ${catkin_LIBRARIES})
启动节点:rosrun mytftest tf_broadcaster 这里第一个参数是ROS包名。第二个参数是可执行文件名add_executable()的第一个参数。
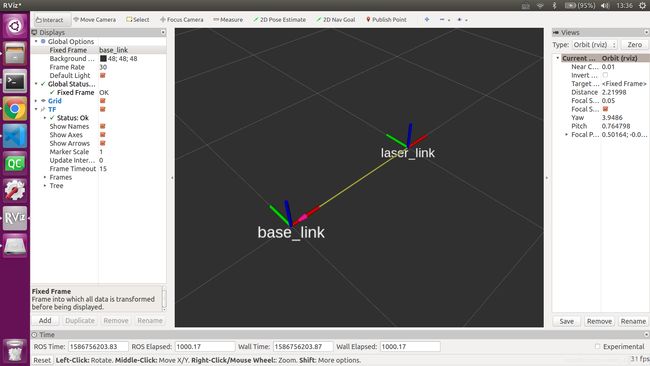
在rviz中显示:
2.新建tf_listener.cpp,监听坐标变换
#include 修改CmakeLists.txt文件:
add_executable(tf_listener src/tf_listener.cpp)
target_link_libraries(tf_listener ${catkin_LIBRARIES})
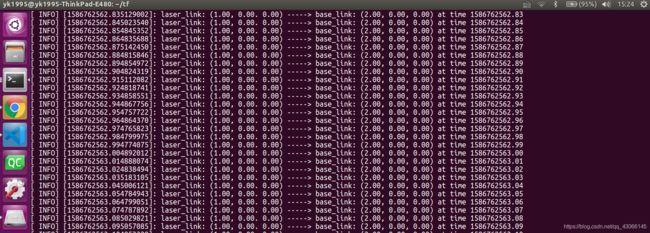
运行上述两个节点,就得到了在机器人坐标系下,雷达中的一个点的坐标
四、相关函数的使用
1.waitForTransform()函数[3]
作用:等待变换在tf树中生效
示例:
#python版本
listener.waitForTransform("/turtle2", "/carrot1", now, rospy.Duration(4.0))
#C++版本
ros::Duration dur (0.5);
tf_.waitForTransform(p_base_frame_,scan.header.frame_id, scan.header.stamp,dur)
(1) waitForTransform()有四个参数:
- /turtle2,父类坐标系
- /carrot1,子类坐标系
- rospy.Time(),这个时间的变换,就是变换的时刻
- rospy.Duration(4.0),等待最长的时间段
(2) waitForTransform() 实际上会阻塞,阻塞时间由第四个参数决定,直到两个坐标系变换开始。(通常是几毫秒)
(3) waitForTransform()常常会调用两次,一开始产生turtle2时候 ,在第一次调用waitForTransform()前,TF可能还没有更新。第一次调用waitForTransform()就会等待,直到/turtle2坐标系开始广播。第二次调用waitForTransform()用Now参数才能获取到值。
2.lookupTransform()函数
作用:获取某一个时间的坐标变换,与waitForTransform配合使用。
rate = rospy.Rate(10.0)
listener.waitForTransform("/turtle2", "/turtle1", rospy.Time(), rospy.Duration(4.0))
while not rospy.is_shutdown():
try:
now = rospy.Time.now()
listener.waitForTransform('/turtle2', '/turtle1', now, rospy.Duration(4.0))
(trans,rot) = listener.lookupTransform('/turtle2', '/turtle1', now)
except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException):
continue
(1)这个lookupTransform()API,有六个参数:
- 变换从坐标系turtle2
- 到turtle1坐标系
- 在now时间
- 变换结果保存的变量
示例:
坐标变换的发送方还是采用上面的还是采用tf_broadcaster.cpp,为了方便查看,平移坐标改成了
base2laser.setRotation(q); //设置旋转坐标
base2laser.setOrigin(tf::Vector3(1,0,1));//设平移坐标,laser在base的(1,0,0)位置
修改tf_listener.cpp
#include 
laserTransform就是当初设置的坐标变换矩阵,将这个矩阵左乘laser_link下的点的位姿就可以得到在base_link下的坐标。
参考文献:
1.https://www.guyuehome.com/355
2.https://www.ncnynl.com/category/roscpp/2/
https://www.ncnynl.com/archives/201611/1079.html