【1.使用Clion调试ROS基本步骤】
1.使用Clion调试ROS基本步骤
1.使用Clion调试ROS基本步骤
- 前言
- 一、版本
- 二、使用步骤
-
- 1.创建ROS基本工作空间
- 2.启动CLION
- 3.使用CLION进行调试
- 总结
前言
例如:ROS1入门学习笔记
一、版本
IDE:CLion-2020.2
环境:Ubuntu20.04\ROS1Noetic
二、使用步骤
1.创建ROS基本工作空间
1.1打开一个终端,创建一个工作空间命名为my_ws
打开一个终端:
//创建名为my_ws的工作空间
//进入my_ws
//cmake一下,工作空间会生成devel,build,src三个子文件夹
代码如下:
mkdir -p my_ws/src
cd my_ws
catkin_make


1.2在工作空间的src文件夹里创建功能包my_pkg
//进入my_ws下的src子文件夹
//创建名为my_pkg的功能包,同时添加一些依赖包
代码如下(示例):
cd src
catkin_create_pkg my_pkg roscpp rospy std_msgs
2.启动CLION
2.1 source工作空间
//退回my_ws工作空间下
//source一下
cd ..
source ./devel/setup.bash
此时devel里会生成.bash文件
 2.2 启动CLION
2.2 启动CLION
执行此步骤之前,先检查自己的CLION安装路径以及文件命名
sh /home/allen/CLion-2020.2/clion-2020.2/bin/clion.sh
运行成功会打开CLION

3.使用CLION进行调试
3.1 打开功能包
在CLION功能栏点击文件/打开,找到功能包的路径点击打开(注意,这里必须选择工作空间的CMakeLists.txt打开,否则build时会失败)

open as project->this window

3.2 添加源文件并编辑配置文件
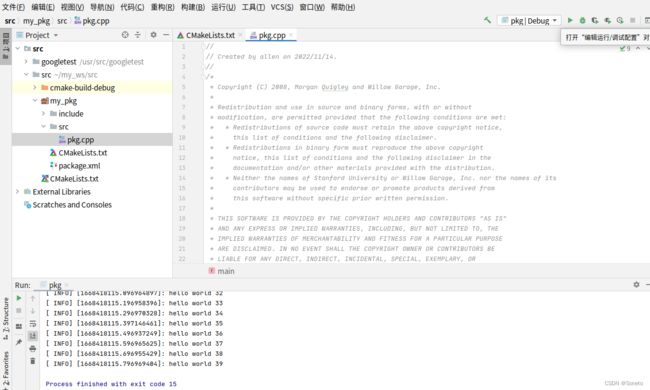
在功能包的src树上右击添加cpp源文件,命名为pkg.cpp

3.3 编写源文件
将下列代码copy到pkg.cpp中保存(原文->https://raw.githubusercontent.com/ros/ros_tutorials/kinetic-devel/roscpp_tutorials/talker/talker.cpp)
/*
* Copyright (C) 2008, Morgan Quigley and Willow Garage, Inc.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions are met:
* * Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
* * Neither the names of Stanford University or Willow Garage, Inc. nor the names of its
* contributors may be used to endorse or promote products derived from
* this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
* ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
* SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
* INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
* CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
* ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*/
// %Tag(FULLTEXT)%
// %Tag(ROS_HEADER)%
#include "ros/ros.h"
// %EndTag(ROS_HEADER)%
// %Tag(MSG_HEADER)%
#include "std_msgs/String.h"
// %EndTag(MSG_HEADER)%
#include 3.4 编辑配置文件并重载
将下列代码copy到Cmakelist.txt中,并Reload重新加载变更
add_executable(pkg src/pkg.cpp)
target_link_libraries(pkg ${catkin_LIBRARIES})
点击重新加载变更
无报错,显示FINISH已完成

3.5 可以在CLION终端或者Linux终端启动Roscore
然后选择pkd|debug运行即可完成调试
总结
实现了CLion调试ROS程序