pytorch 搭建 VGG 网络
目录
1. VGG 网络介绍
2. 搭建VGG 网络
3. code
1. VGG 网络介绍
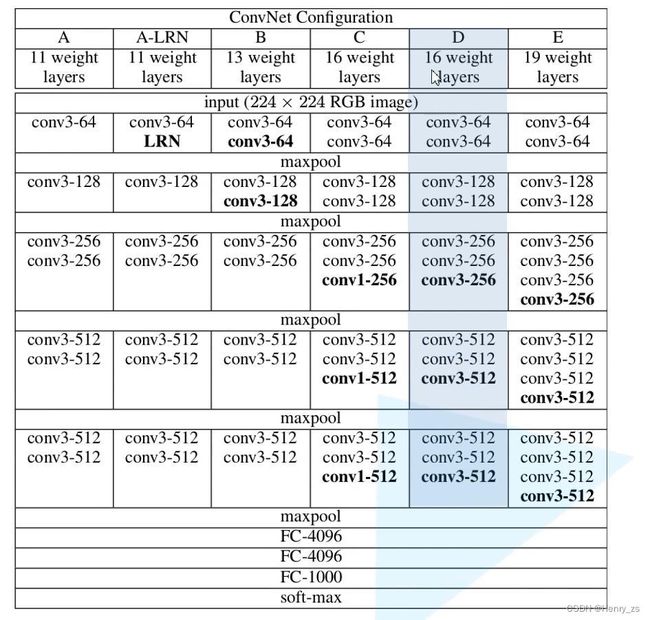
VGG16 的网络结构如图:

VGG 网络是由卷积层和池化层构成基础的CNN
它的CONV卷积层的参数全部是由 stride = 1,padding = 1
它的maxpool 最大池化层的参数都是 size = 2 , stride = 2 组成的
VGG 网络的亮点是 它的卷积层全部都是由 3*3 的小型卷积核连续进行的,通过重复进行---卷积层重叠2-4次,然后再由池化层将size 减半进行处理
VGG 网络提出了一个新的概念,就是通过叠加 3*3 的卷积核来替代大的卷积核,这样可以减少网络训练的参数。2 个3*3 卷积核连续卷积代替 5*5 的卷积核,3个 3*3 的卷积核连续卷积代替 7*7 的卷积核
再介绍怎么可以通过连续卷积小的kernel 可以替代大的kernel 之前,先介绍一下感受野
感受野就是说,卷积层的输出 对应的输入区域的范围。例如下图所示,输入是 9*9 大小的图片,经过卷积层的输出size为:output = (9 - 3 + 2 * 0) / 2 + 1 =4 4*4大小的输出,然后经过池化层变为 2*2 的输出,那也就是说最后2*2的一个像素的图像是由卷积后2*2像素的大小决定的,也是由输入图像 5*5 范围内的图像决定的。那么这里的2*2就是池化后一个像素点的感受野,5*5就是卷积后2*2 图像的感受野,也可以说输入的5*5 是卷积-池化后一个像素点的感受野
所以计算卷积后区域大小的公式:
,反过来就是感受野的计算公式
因此感受野size 的计算公式:
TIP:这里不计算pad的原因,是因为这里pad的作用大都是防止图像缩小,而这里的证明就是为了让图像通过CONV层提取关键特征的

感受野介绍完,我们就可以了解为什么连续小的卷积核等于大的卷积核的运算了
假设输出一个像素点,那么对应 3*3 卷积核的感受野是3*3大小的,再往前对应的 3*3 卷积核的感受野是5*5大小的,再往前对应的 3*3 卷积核的感受野是7*7大小的。那么如果对7*7大小的图片做卷积,用kernel_size 是7*7的话,带入公式output = (7 - 7)/2 + 1 =1 对应的也是一个像素点

因此:2 个3*3 卷积核连续卷积代替 5*5 的卷积核,3个 3*3 的卷积核连续卷积代替 7*7 的卷积核
这样做的好处就是可以减少卷积核的参数:因为3*3*3 = 27 个权重参数,7*7 =49 个权重参数。这样可能感受不到差别,但是算上输出的channel和输出的channel呢?前者就是27*C*C,而后者是49*C*C,这样参数差别就很大了。
所以,CONV卷积层的参数全部是由 stride = 1,padding = 1的情况下,连续2次3*3卷积等于5*5的卷积,连续3次3*3的卷积等于7*7的卷积
2. 搭建VGG 网络
VGG网络的结构有很多种形式,这里常用的是D,16个权重层的形式
首先,先建立一个字典文件存放不同VGG网络的配置列表

然后通过传入对应的key,建立对应的VGG网络卷积和池化层

然后,通过make_features 创建的特征提取层,可以建立最终的VGG网络
最后就是定义生成VGG网络的函数
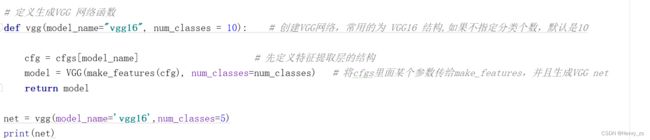
这里vgg参数传递的顺序为:
实参里面的vgg16-->形参model_name-->cfgs取出key对应的value赋值给cfg-->cfg传递给make_feature建立卷积层-池化层layers,返回给nn.Sequential-->最后传递给VGG里面的feature生成特征提取层
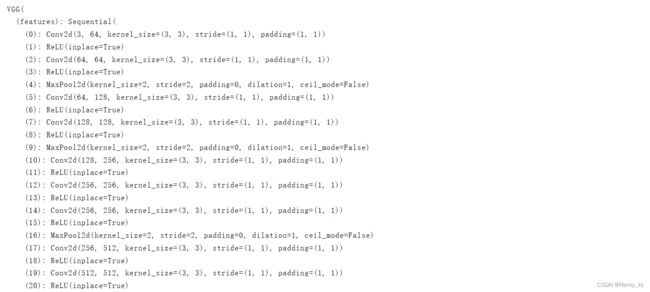
生成的VGG16为:

3. code
因为网络太大 , 代码跑了很久都没有结果 , 所以这里就不放训练和预测的结果了
训练和预测的代码也不做讲解了,和 pytorch 搭建 LeNet 网络对 CIFAR-10 图片分类 代码的重合度很高
model代码
import torch.nn as nn
import torch
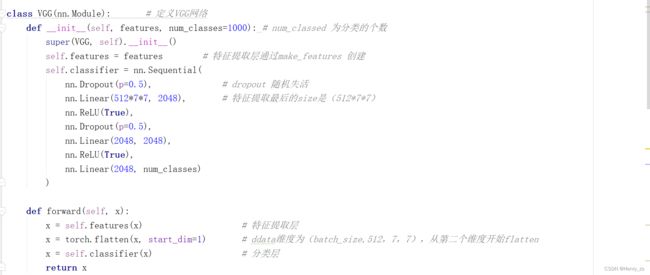
class VGG(nn.Module): # 定义VGG网络
def __init__(self, features, num_classes=1000): # num_classed 为分类的个数
super(VGG, self).__init__()
self.features = features # 特征提取层通过make_features 创建
self.classifier = nn.Sequential(
nn.Dropout(p=0.5), # dropout 随机失活
nn.Linear(512*7*7, 2048), # 特征提取最后的size是(512*7*7)
nn.ReLU(True),
nn.Dropout(p=0.5),
nn.Linear(2048, 2048),
nn.ReLU(True),
nn.Linear(2048, num_classes)
)
def forward(self, x):
x = self.features(x) # 特征提取层
x = torch.flatten(x, start_dim=1) # ddata维度为(batch_size,512,7,7),从第二个维度开始flatten
x = self.classifier(x) # 分类层
return x
def make_features(cfg: list): # 生成特征提取层,就是VGG前面的卷积池化层
layers = [] # 保存每一层网络结构
in_channels = 3 # 输入图片的深度channels,起始输入是RGB 3 通道的
for v in cfg: # 遍历配置列表 cfgs
if v == "M": # M 代表最大池化层,VGG中maxpool的size=2,stride = 2
layers += [nn.MaxPool2d(kernel_size=2, stride=2)] # M 代表最大池化层
else:
conv2d = nn.Conv2d(in_channels, v, kernel_size=3, padding=1) # 数字代表卷积核的个数==输出的channels
layers += [conv2d, nn.ReLU(True)] # 添加卷积层
in_channels = v # 输出的channels == 下次输入的channels
return nn.Sequential(*layers) # 解引用,将大的list里面的小list拿出来
# 特征提取层的 网络结构参数
cfgs = { # 建立网络的字典文件,对应的key可以生成对应网络结构参数的value值
'vgg11': [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'], # 数字代表卷积核的个数,M代表池化层
'vgg13': [64, 64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'vgg16': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M'],
'vgg19': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 256, 'M', 512, 512, 512, 512, 'M', 512, 512, 512, 512, 'M'],
}
# 定义生成VGG 网络函数
def vgg(model_name="vgg16", num_classes = 10): # 创建VGG网络,常用的为 VGG16 结构,如果不指定分类个数,默认是10
cfg = cfgs[model_name] # 先定义特征提取层的结构
model = VGG(make_features(cfg), num_classes=num_classes) # 将cfgs里面某个参数传给make_features,并且生成VGG net
return model
net = vgg(model_name='vgg16',num_classes=5)
print(net)train部分代码:
import torch
import torch.nn as nn
import torchvision
import torchvision.transforms as transforms
import torch.optim as optim
from model import vgg # 应该导入创建网络的vgg,而不是空的框架VGG
data_transform = transforms.Compose([transforms.Resize((224,224)),transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]) # 图像预处理
batch_size = 32
# 载入训练集
train_dataset= torchvision.datasets.CIFAR10(root='./data',train=True,download=False,transform=data_transform) # 下载数据集
train_loader = torch.utils.data.DataLoader(train_dataset,batch_size=batch_size, shuffle=True) # 读取数据集
# 载入测试集
test_dataset = torchvision.datasets.CIFAR10(root='./data',train=False,download=False,transform=data_transform) # 下载数据集
test_loader = torch.utils.data.DataLoader(test_dataset,batch_size=batch_size, shuffle=False) # 读取数据集
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck') # 十个分类的labels
net = vgg(model_name='vgg16', num_classes=10) # 实例化网络
loss_function = nn.CrossEntropyLoss() # 定义交叉熵损失函数
optimizer = optim.Adam(net.parameters(), lr=0.0001) # 定义优化器
best_acc = 0.0
save_path = './VGG.pth' # 保存的路径
for epoch in range(5):
net.train() # 开启dropout
running_loss = 0.0
for step, data in enumerate(train_loader, start=0):
images, labels = data
optimizer.zero_grad() # 梯度下降
outputs = net(images) # 前向传播
loss = loss_function(outputs, labels) # 计算损失
loss.backward() # 反向传播
optimizer.step() # 梯度更新
running_loss += loss.item()
# test
net.eval() # 关闭dropout
acc = 0.0
total = 0
with torch.no_grad():
for test_data in test_loader:
test_images, test_labels = test_data
outputs = net(test_images)
predicted = torch.max(outputs, dim=1)[1]
acc += (predicted == test_labels).sum().item()
total += test_labels.size(0) # total += batch_size
accurate = acc / total # 计算正确率
print('[epoch %d] train_loss: %.3f accuracy: %.3f' %
(epoch + 1, running_loss /step, accurate))
if accurate > best_acc:
best_acc = accurate
torch.save(net.state_dict(), save_path)
print('Finished Training')
predict部分代码:
import torch
from PIL import Image
from torchvision import transforms
from model import vgg
data_transform = transforms.Compose(
[transforms.Resize((224, 224)),
transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
img = Image.open('./dog.png') # 载入图片
img = data_transform(img) # 预处理
img = torch.unsqueeze(img, dim=0) # 增加维度
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
model = vgg(model_name="vgg16", num_classes=10)
model.load_state_dict(torch.load('./VGG.pth')) # 读取网络参数
model.eval() # 预测的时候不需要随机失活
with torch.no_grad():
output = model(img)
predict = torch.max(output, dim=1)[1]
print(classes[int(predict)])