点云特征提取及分类、VFH、SVM、CNN
随着激光雷达,RGBD相机等3D传感器在机器人,无人驾驶领域的广泛应用。
针对三维点云数据的研究也逐渐从低层次几何特征提取( PFH, FPFH,VFH等)向高层次语义理解过渡(点云识别,语义分割)。与图像感知领域深度学习几乎一统天下不同,针对无序点云数据的深度学习方法研究则进展缓慢。分析其背后的原因,不外乎三个方面:
1.点云具有无序性。受采集设备以及坐标系影响,同一个物体使用不同的设备或者位置扫描,三维点的排列顺序千差万别,这样的数据很难直接通过End2End的模型处理。
2.点云具有稀疏性。在机器人和自动驾驶的场景中,激光雷达的采样点覆盖相对于场景的尺度来讲,具有很强的稀疏性。在KITTI数据集中,如果把原始的激光雷达点云投影到对应的彩色图像上,大概只有3%的像素才有对应的雷达点。这种极强的稀疏性让基于点云的高层语义感知变得尤其困难。
3.点云信息量有限。点云的数据结构就是一些三维空间的点坐标构成的点集,本质是对三维世界几何形状的低分辨率重采样,因此只能提供片面的几何信息。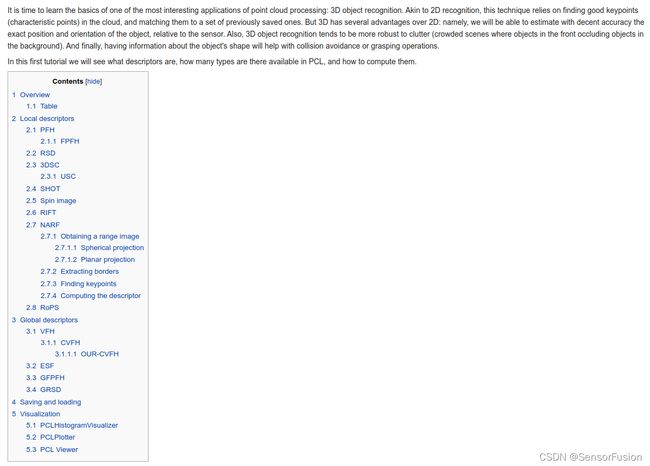
https://robotica.unileon.es/index.php?title=PCL/OpenNI_tutorial_4:3D_object_recognition(descriptors)
数据与特征决定了机器学习的上限,
模型/算法/参数只是来逼近这个上限。
0: 分类方式
按照特征的物理属性,可以将特征分为:几何域,强度域。
按照特征的空间尺度,可以分为:单点特征,局部特征,全局特征。
1:传统特征
在点云分类任务中,可直接利用特征向量训练SVM或者多层感知机来进行分类,而在以点为单位的点云分割或者分块任务中,需要结合每一点的局部特征和全局特征进行特征融合和处理,实现逐点的分类。
单点特征
主要有:三维坐标(X, Y, Z), 回波强度 Intensity, 法线 (Nx,Ny,Nz),主曲率(PCx, PCy, PCz, 及两个特征值 PC1, PC2)
局部特征
(一)几何域
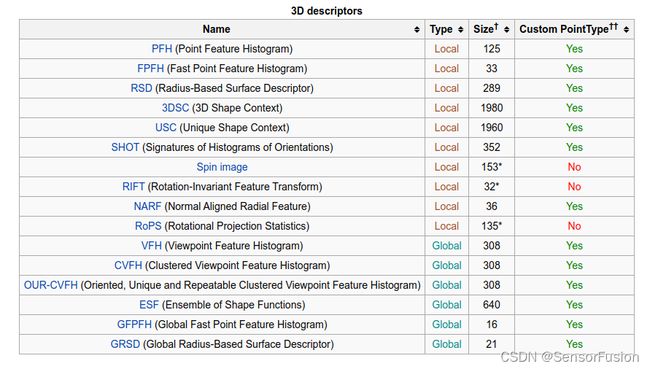
局部特征常见的有各种几何特征描述子:PFH,FPFH,SHOT,C-SHOT,RSD,3D形状描述子等。
点特征直方图(Point Feature Histograms)
点特征直方图(PFH)表示法是基于点与其k邻域之间的关系以及它们的估计法线,简言之,它考虑估计法线方向之间所有的相互作用,试图捕获最好的样本表面变化情况,以描述样本的几何特征。
#include (二)强度域
强度梯度(IGx, IGy, IGz):
全局特征
(一)几何域
常见的几何域全局特征有:
PFH:
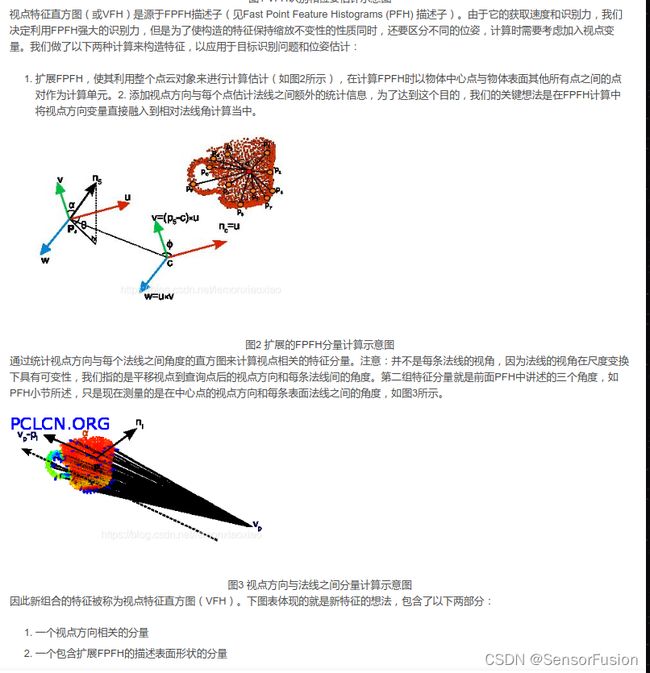
VFH:Viewpoint Feature Histogram
CVFH:在VFH基础上解决了点云残缺的问题。
发展历程:PFH、 FPHF、VFH
PFH点特征的描述子一般是基于点坐标、法向量、曲率来描述某个点周围的几何特征。用点特征描述子不能提供特征之间的关系,减少了全局特征信息。因此诞生了一直基于直方图的特征描述子:PFH–point feature histogram(点特征直方图)。
PFH通过参数化查询点和紧邻点之间的空间差异,形成了一个多维直方图对点的近邻进行几何描述,直方图提供的信息对于点云具有平移旋转不变性,对采样密度和噪声点具有稳健性。PFH是基于点与其邻近之间的关系以及它们的估计法线,也即是它考虑估计法线之间的相互关系,来描述几何特征。
统计点对直接的关系,所有的四元组将会以某种统计的方式放进直方图中
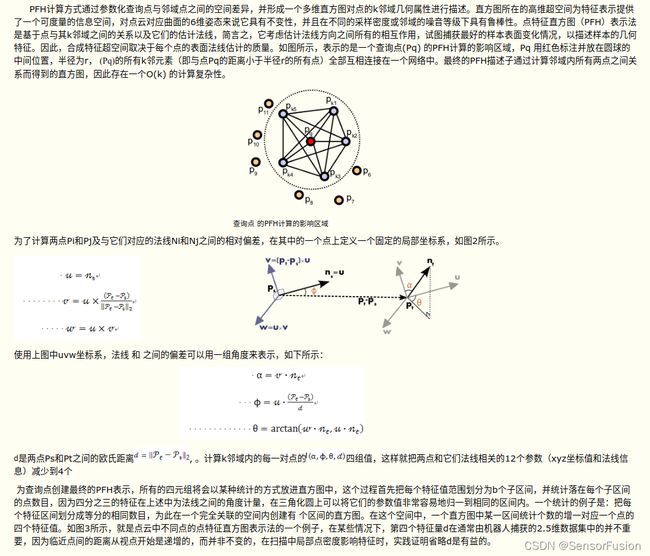
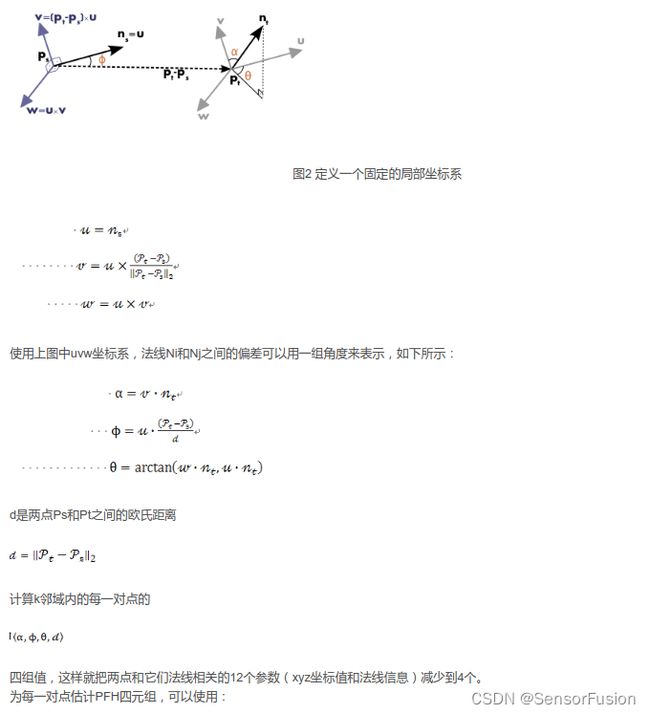
通过点对数据,转为四组值,
把两点和它们法线相关的12个参数(xyz坐标值和法线信息)减少到4个。
如下方式:
#include pfh;// phf特征估计其器
//pcl::FPFHEstimation fpfh;// fphf特征估计其器
// pcl::FPFHEstimationOMP fpfh;//多核加速
vfh.setInputCloud (cloud_ptr);
vfh.setInputNormals (cloud_normals_ptr);
//如果点云是PointNormal类型,则执行vfh.setInputNormals (cloud);
//创建一个空的kd树对象,并把它传递给FPFH估计对象。
//基于已知的输入数据集,建立kdtree
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree2 (new pcl::search::KdTree<pcl::PointXYZ> ());
//pcl::KdTreeFLANN::Ptr tree2 (new pcl::KdTreeFLANN ()); //-- older call for PCL 1.5-
vfh.setSearchMethod (tree2);//设置近邻搜索算法
//输出数据集
//pcl::PointCloud::Ptr pfh_fe_ptr (new pcl::PointCloud ());//phf特征
//pcl::PointCloud::Ptr fpfh_fe_ptr (new pcl::PointCloud());//fphf特征
pcl::PointCloud<pcl::VFHSignature308>::Ptr vfh_fe_ptr (new pcl::PointCloud<pcl::VFHSignature308> ());//vhf特征
//使用半径在5厘米范围内的所有邻元素。
//注意:此处使用的半径必须要大于估计表面法线时使用的半径!!!
//fpfh.setRadiusSearch (0.05);
//计算pfh特征值
vfh.compute (*vfh_fe_ptr);
三维不变矩:矩特征主要表征了图像区域的几何特征,又称为几何矩, 由于其具有旋转、平移、尺度等特性的不变特征,所以又称其为不变矩。但要注意,不变矩对点云密度十分敏感!
常用的特征描述算法有:
法线和曲率计算 normal_3d_feature 、
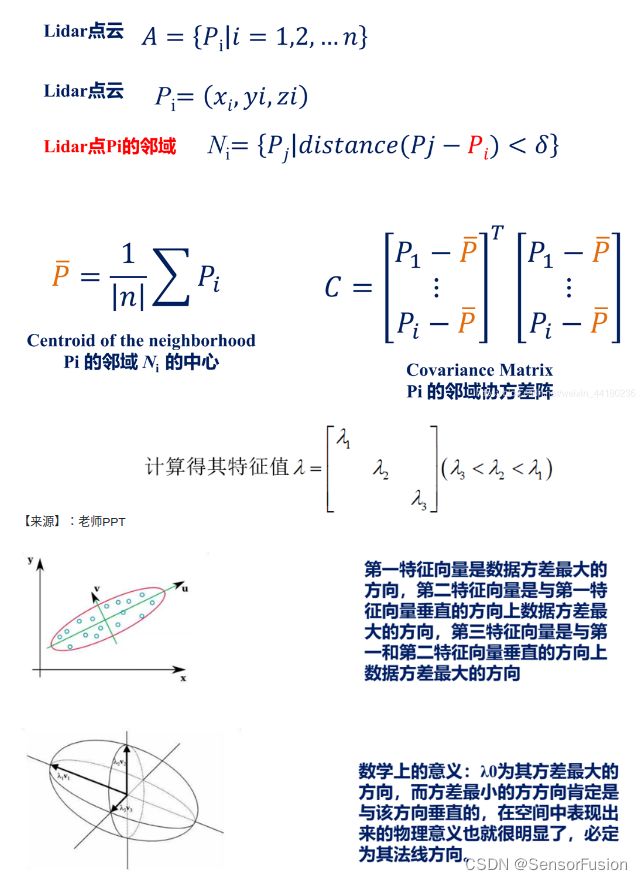
特征值分析、
PFH 点特征直方图描述子 nk2、
FPFH 快速点特征直方图描述子 FPFH是PFH的简化形式 nk、
3D Shape Context、 文理特征
Spin Image
VFH视点特征直方图(Viewpoint Feature Histogram)
NARF关键点 pcl::NarfKeypoint narf特征 pcl::NarfDescriptor
RoPs特征(Rotational Projection Statistics)
https://github.com/Ewenwan/MVision/tree/master/PCL_APP
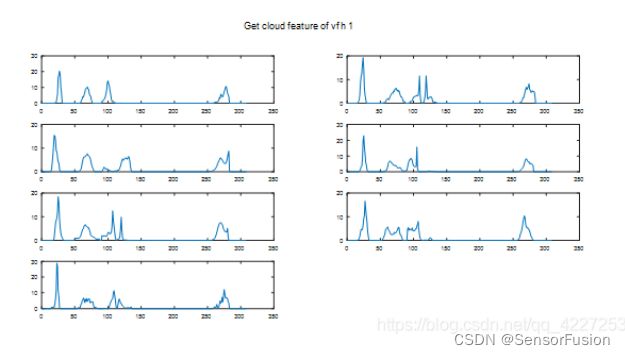
例如:利用VFH+SVM训练模型
VFH特征提取
#include 特征可视化如下:
SVM 特征分类
SVM
1.两分类的时候标签定义为-1和1
2.多分类的时候标签定义从1开始,用到测试时是int index = model->detect();
3.两分类的时候可生成txt或者xml文件,多分类只能用xml
选择核函数非常重要:
enum KernelTypes {
/** Returned by SVM::getKernelType in case when custom kernel has been set */
CUSTOM=-1,
//线性核
LINEAR=0,
//多项式核
POLY=1,
//径向基核(高斯核)
RBF=2,
//sigmoid核
SIGMOID=3,
//指数核,与高斯核类似
CHI2=4,
//直方图核
INTER=5
};
VFH数据提取代码
对扩展的FPFH分量来说,默认的VFH的实现使用45个子区间进行统计,
而对于视点分量要使用128个子区间进行统计,这样VFH就由一共308个浮点数组成阵列
void
getPointCloud::getTrainingData(std::vector <cv::Mat>& _trainingData,
std::vector <cv::Mat>& _trainingLabels){
float minX,minY,minZ=1000.0;
float maxX,maxY,maxZ=0.0;
pcl::VoxelGrid<pcl::PointXYZ> vg;
cv::Mat label = cv::Mat::zeros(1,1,CV_32FC1);
for(size_t fileIdx=0; fileIdx<DataFiles.size();fileIdx++){
std::vector<std::string> files = std::vector<std::string>();
pcl::PointXYZ minPt, maxPt;
int skip=0;
getdir(DataFiles[fileIdx]+"/",files);
cv::Mat trainingData;
cv::Mat trainingLabels;
for (unsigned int i = 0;i < files.size();i++) {
// remove this after testing classifier training
// if(skip > 5){break;}
// skip++;
if(files[i] == "." || files[i] == ".."){
ROS_INFO(" . or .. files ignored");
}
else{
std::cout << " [ processing ] " << files[i];
cloud = loadCloud(DataFiles[fileIdx]+"/"+files[i]);
//-- voxelization of the cloud --------//
vg.setInputCloud (cloud);
vg.setLeafSize (0.005f, 0.005f, 0.005f);
vg.filter (*cloud);
//-- Getting the descriptors ----------//
pc.cloudinput(cloud);
VFH_descriptor = pc.getDescriptor();
cv::Mat _descriptor = cv::Mat::zeros(1,306,CV_32FC1);
for(size_t i=0;i<306;i++){
_descriptor.at<float>(0,i)=(float)VFH_descriptor->points[0].histogram[i];
}
//-------------------------------------//
trainingData.push_back(_descriptor);
if(DataFiles[fileIdx] == (PCD_BASE_PATH+CLASSIFIER_NAME)){
label.at<float>(0,0)=1.0;
trainingLabels.push_back(label);
std::cout << " [label] 1.0";
}
else{
label.at<float>(0,0)= -1.0;
trainingLabels.push_back(label);
std::cout << " [label] -1.0";
}
std::cout << std::endl;
}
}
_trainingData.push_back(trainingData);
_trainingLabels.push_back(trainingLabels);
}
}
可以利用opencv的SVM进行训练
classifier::classifier(void){
SVMclf = cv::ml::SVM::create();
}
classifier::classifier(std::string filename){
SVMclf = cv::ml::SVM::create();
SVMclf->load(filename.c_str());
}
(二)关键点
我们都知道在二维图像上,
Harris、
SIFT、
SURF、
KAZE
常见的三维点云关键点提取算法有一下几种:
ISS3D、
Harris3D、
NARF、
SIFT3D
pcl中的sift等关键点
NARF关键点
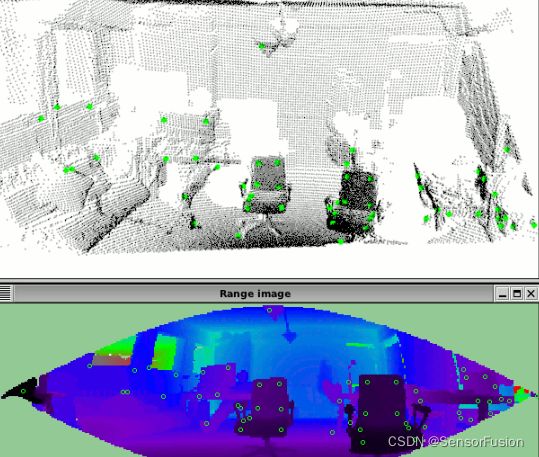
NARF(Normal Aligned Radial Feature)关键点是为了从深度图像中识别物体而提出来的,关键点探测的重要一步是减少特征提取时的搜索空间,把重点放在重要的结构上,对NARF关键点提取过程有以下要求:提取的过程必须将边缘及物体表面变化信息考虑在内;关键点的位置必须稳定,可以被重复探测,即使换了不同的视角;关键点所在的位置必须有稳定的支持区域,可以计算描述子并进行唯一的法向量估计。为了满足以上要求,提出以下探测步骤来进行关键点提取:
(1)遍历每个深度图像点,通过寻找在近邻区域有深度突变的位置进行边缘检测。
(2)遍历每个深度图像点,根据近邻区域的表面变化决定一种测度表面变化的系数,以及变化的主方向。
(3)根据第二步找到的主方向计算兴趣值,表征该方向与其他方向的不同,以及该处表面的变化情况,即该点有多稳定。
(4)对兴趣值进行平滑过滤。
(5)进行无最大值压缩找到最终的关键点,即为NARF关键点。
#include \n\n"
<< "Options:\n"
<< "-------------------------------------------\n"
<< "-r angular resolution in degrees (default " <<angular_resolution<<")\n"
<< "-c coordinate frame (default " << (int)coordinate_frame<<")\n"
<< "-m Treat all unseen points as maximum range readings\n"
<< "-s support size for the interest points (diameter of the used sphere - "
<< "default "<<support_size<<")\n"
<< "-h this help\n"
<< "\n\n";
}
int main (int argc, char** argv)
{
/* 解析命令行参数 */
if (pcl::console::find_argument (argc, argv, "-h") >= 0)
{
printUsage (argv[0]);
return 0;
}
if (pcl::console::find_argument (argc, argv, "-m") >= 0)
{
setUnseenToMaxRange = true;
std::cout << "Setting unseen values in range image to maximum range readings.\n";
}
int tmp_coordinate_frame;
if (pcl::console::parse (argc, argv, "-c", tmp_coordinate_frame) >= 0)
{
coordinate_frame = pcl::RangeImage::CoordinateFrame (tmp_coordinate_frame);
std::cout << "Using coordinate frame "<< (int)coordinate_frame<<".\n";
}
if (pcl::console::parse (argc, argv, "-s", support_size) >= 0)
std::cout << "Setting support size to "<<support_size<<".\n";
if (pcl::console::parse (argc, argv, "-r", angular_resolution) >= 0)
std::cout << "Setting angular resolution to "<<angular_resolution<<"deg.\n";
angular_resolution = pcl::deg2rad (angular_resolution);
/* 读取pcd文件;如果没有指定文件,就创建样本点 */
pcl::PointCloud<PointType>::Ptr point_cloud_ptr (new pcl::PointCloud<PointType>);
pcl::PointCloud<PointType>& point_cloud = *point_cloud_ptr;
pcl::PointCloud<pcl::PointWithViewpoint> far_ranges;
Eigen::Affine3f scene_sensor_pose (Eigen::Affine3f::Identity ());
std::vector<int> pcd_filename_indices = pcl::console::parse_file_extension_argument (argc, argv, "pcd");
if (!pcd_filename_indices.empty ())
{
std::string filename = argv[pcd_filename_indices[0]];
if (pcl::io::loadPCDFile (filename, point_cloud) == -1)
{
std::cerr << "Was not able to open file \""<<filename<<"\".\n";
printUsage (argv[0]);
return 0;
}
scene_sensor_pose = Eigen::Affine3f (Eigen::Translation3f (point_cloud.sensor_origin_[0],
point_cloud.sensor_origin_[1],
point_cloud.sensor_origin_[2])) *
Eigen::Affine3f (point_cloud.sensor_orientation_);
std::string far_ranges_filename = pcl::getFilenameWithoutExtension (filename)+"_far_ranges.pcd";
if (pcl::io::loadPCDFile (far_ranges_filename.c_str (), far_ranges) == -1)
std::cout << "Far ranges file \""<<far_ranges_filename<<"\" does not exists.\n";
}
else
{
setUnseenToMaxRange = true;
std::cout << "\nNo *.pcd file given => Generating example point cloud.\n\n";
for (float x=-0.5f; x<=0.5f; x+=0.01f)
{
for (float y=-0.5f; y<=0.5f; y+=0.01f)
{
PointType point; point.x = x; point.y = y; point.z = 2.0f - y;
point_cloud.points.push_back (point);
}
}
point_cloud.width = point_cloud.size (); point_cloud.height = 1;
}
/* 从点云数据,创建深度图像 */
float noise_level = 0.0;
float min_range = 0.0f;
int border_size = 1;
pcl::RangeImage::Ptr range_image_ptr (new pcl::RangeImage);
pcl::RangeImage& range_image = *range_image_ptr;
range_image.createFromPointCloud (point_cloud, angular_resolution, pcl::deg2rad (360.0f), pcl::deg2rad (180.0f),
scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size);
range_image.integrateFarRanges (far_ranges);
if (setUnseenToMaxRange)
range_image.setUnseenToMaxRange ();
/* 打开3D可视化窗口,并添加点云 */
pcl::visualization::PCLVisualizer viewer ("3D Viewer");
viewer.setBackgroundColor (1, 1, 1);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> range_image_color_handler (range_image_ptr, 0, 0, 0);
viewer.addPointCloud (range_image_ptr, range_image_color_handler, "range image");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "range image");
//viewer.addCoordinateSystem (1.0f, "global");
//PointCloudColorHandlerCustom point_cloud_color_handler (point_cloud_ptr, 150, 150, 150);
//viewer.addPointCloud (point_cloud_ptr, point_cloud_color_handler, "original point cloud");
viewer.initCameraParameters ();
//setViewerPose (viewer, range_image.getTransformationToWorldSystem ());
/* 显示深度图像 */
pcl::visualization::RangeImageVisualizer range_image_widget ("Range image");
range_image_widget.showRangeImage (range_image);
/* 提取NARF关键点 */
pcl::RangeImageBorderExtractor range_image_border_extractor; // 创建深度图像的边界提取器,用于提取NARF关键点
pcl::NarfKeypoint narf_keypoint_detector (&range_image_border_extractor); // 创建NARF对象
narf_keypoint_detector.setRangeImage (&range_image);
narf_keypoint_detector.getParameters ().support_size = support_size;
//narf_keypoint_detector.getParameters ().add_points_on_straight_edges = true;
//narf_keypoint_detector.getParameters ().distance_for_additional_points = 0.5;
pcl::PointCloud<int> keypoint_indices; // 用于存储关键点的索引
narf_keypoint_detector.compute (keypoint_indices); // 计算NARF关键点
std::cout << "Found "<<keypoint_indices.size ()<<" key points.\n";
/* 在range_image_widget中显示关键点 */
//for (std::size_t i=0; i
//range_image_widget.markPoint (keypoint_indices[i]%range_image.width,
//keypoint_indices[i]/range_image.width);
/* 在3D viwer窗口中显示关键点 */
pcl::PointCloud<pcl::PointXYZ>::Ptr keypoints_ptr (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>& keypoints = *keypoints_ptr;
keypoints.resize (keypoint_indices.size ());
for (std::size_t i=0; i<keypoint_indices.size (); ++i)
keypoints[i].getVector3fMap () = range_image[keypoint_indices[i]].getVector3fMap ();
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> keypoints_color_handler (keypoints_ptr, 0, 255, 0);
viewer.addPointCloud<pcl::PointXYZ> (keypoints_ptr, keypoints_color_handler, "keypoints");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "keypoints");
while (!viewer.wasStopped ())
{
range_image_widget.spinOnce (); // 处理GUI事件
viewer.spinOnce ();
pcl_sleep(0.01);
}
}
NARF 深度图关键点
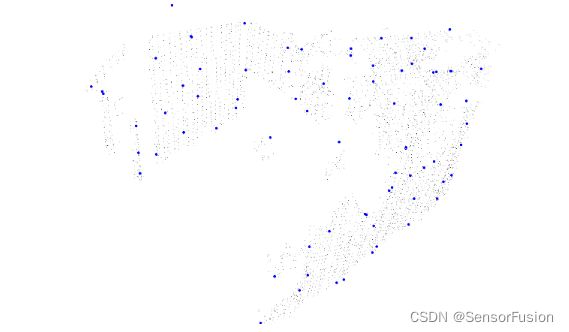
Harris算子是常见的特征检测算子,既可以提取角点也可以提取边缘点。与2D Harris角点检测原理不同,3D Harris角点检测利用的是点云法向量的信息。
#include ::LOWE);
harris_detector->compute (*Harris_keypoints);
cout<< "Harris_keypoints的大小是" << Harris_keypoints->size() <<endl;
writer.write<pcl::PointXYZI> ("Harris_keypoints.pcd", *Harris_keypoints, false);
pcl::visualization::PCLVisualizer visu3("clouds");
visu3.setBackgroundColor(255,255,255);
visu3.addPointCloud (Harris_keypoints, ColorHandlerT3 (Harris_keypoints, 0.0, 0.0, 255.0), "Harris_keypoints");
visu3.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE,8,"Harris_keypoints");
visu3.addPointCloud(input_cloud,"input_cloud");
visu3.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR,0,0,0,"input_cloud");
visu3.spin ();
}
自定义特征
例如:
相差较大的物体,利用特征值区别
如果面状性较好的话,可以知道会有两个特征值大小接近,一个特征值很小;
如果点云很分散的话,那么3个特征值的大小应该是比较接近的。
https://blog.csdn.net/CVSvsvsvsvs/article/details/85784438
例如:
多分类mnist用法
#include 2:深度神经网络
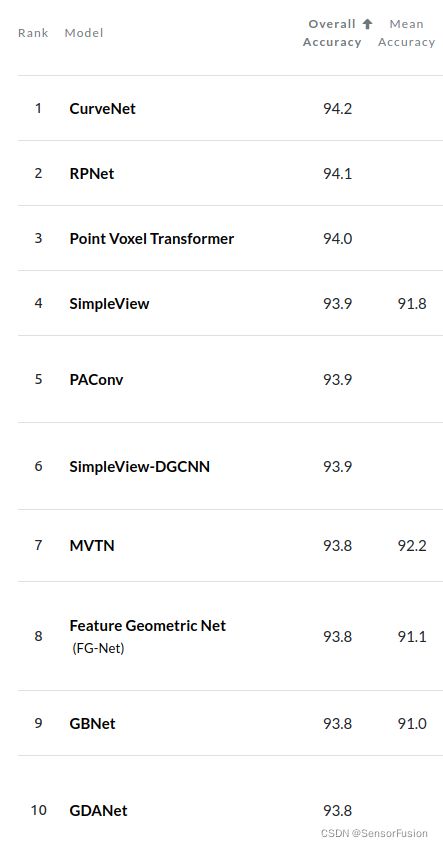
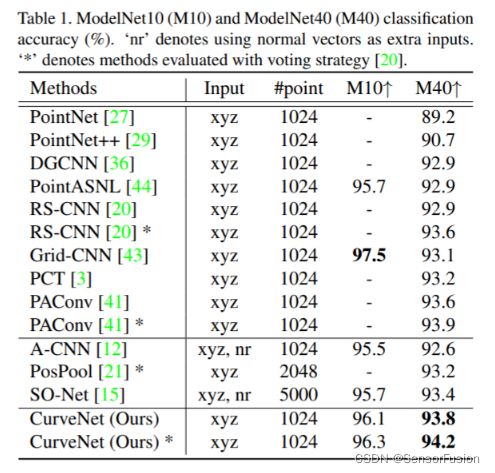
ModelNet40数据集

ScanObjectNN 数据集
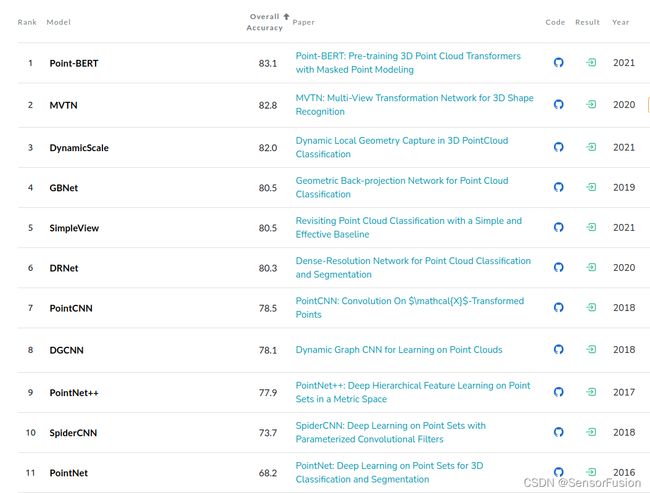
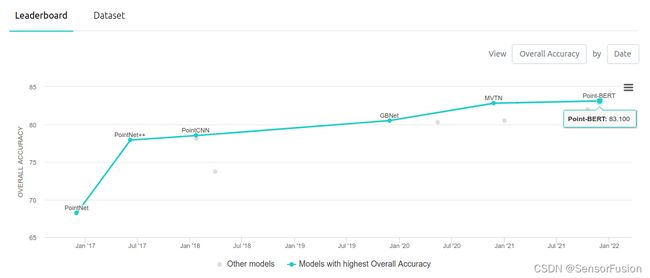
CNN方法:
PointNet, DGCNN, PPFNet, PointConv
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
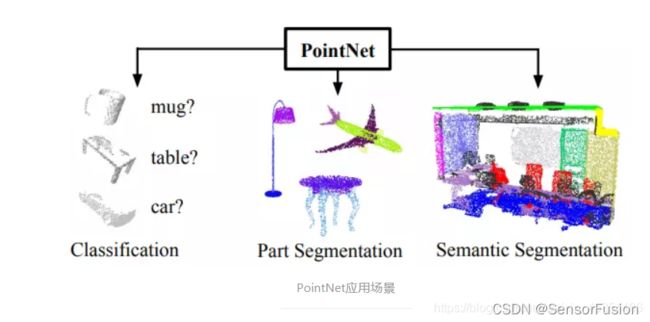
其中 PointNet系列方法
常规的 3* N为输入
N即n个点云数据(x,y,z)
3D CNN系列方法
例如 利用kears进行模型训练
""" 3D-CNN is initailized to have grid size 40x40x40 """
cnn = CNNModel(ip_shape=(1, 40, 40, 40))
cnn.load_model(base_path=os.path.join(PACKAGE_PATH, "bin/3DCNN_model"))
from keras.preprocessing.image import ImageDataGenerator
from keras.models import Sequential
from keras.layers.core import Dense, Dropout, Activation, Flatten
from keras.layers.convolutional import Conv3D,Convolution3D, MaxPooling3D
from keras.optimizers import SGD, RMSprop
from keras.utils import np_utils, generic_utils
from sklearn.preprocessing import LabelBinarizer
from termprinter import *
from keras.models import model_from_json
import numpy as np
import os
class CNNModel:
def __init__(self,nb_classes=5,ip_shape=(1, 40, 40, 40)):
self.encoder = LabelBinarizer()
self.CNN_model(nb_classes=nb_classes,ip_shape=ip_shape)
def CNN_model(self,nb_classes = 5,ip_shape=(1, 40, 40, 40)):
self.model = Sequential()
self.model.add(
Conv3D(32, (5,5,5),
strides=(1, 1, 1), padding='valid', data_format="channels_first",input_shape=ip_shape,
activation='relu', dilation_rate=(1, 1, 1) ))
self.model.add(
Conv3D(32, (5,5,5),
strides=(1, 1, 1), padding='valid', data_format="channels_first",
# activation='relu'))
activation='sigmoid'))
self.model.add(MaxPooling3D(pool_size=(2,2,2)))
self.model.add(Dropout(0.1))
self.model.add(
Conv3D(32, (3,3,3),
strides=(1, 1, 1), padding='valid', data_format="channels_first",
# activation='relu'))
activation='sigmoid'))
self.model.add(
Conv3D(32, (3,3,3),
strides=(1, 1, 1), padding='valid', data_format="channels_first",
activation='relu'))
self.model.add(MaxPooling3D(pool_size=(2,2,2)))
self.model.add(Dropout(0.1))
self.model.add(
Conv3D(32, (3,3,3),
strides=(1, 1, 1), padding='valid', data_format="channels_first",
activation='relu'))
self.model.add(
Conv3D(32, (3,3,3),
strides=(1, 1, 1), padding='valid', data_format="channels_first",
activation='relu'))
self.model.add(MaxPooling3D(pool_size=(2,2,2)))
self.model.add(Dropout(0.1))
self.model.add(Flatten())
# self.model.add(Dense(128, init='normal', activation='relu'))
self.model.add(Dense(128, kernel_initializer='normal', activation='relu'))
# self.model.add(Dropout(0.5))
# self.model.add(Dense(nb_classes,init='normal'))
self.model.add(Dense(nb_classes,kernel_initializer='normal'))
self.model.add(Activation('softmax'))
# self.model.compile(loss='categorical_crossentropy', optimizer='RMSprop', metrics=['mse', 'accuracy'])
self.model.compile(loss='categorical_crossentropy', optimizer='adam', metrics=['mse', 'accuracy'])
# return self.model
def train(self,data,labels):
labels = self.encoder.fit_transform(labels)
hist = self.model.fit(data,labels,batch_size=10, epochs = 10,shuffle=True)
def test(self,data,labels):
labels = self.encoder.fit_transform(labels)
score = self.model.evaluate(data,labels,batch_size=10)
print('**********************************************')
print(OKGREEN+"[{d[0]}]{d[3]} [{d[1]}]{d[4]} [{d[2]}]{d[5]}".format(d=self.model.metrics_names+score) + ENDC)
def predict(self,data,labelsSet):
_idx = np.argmax(self.model.predict(data))
return labelsSet[_idx],self.model.predict_proba(data)[0][_idx]
def save_model(self,base_path="."):
# serialize model to JSON
json_path = os.path.join(base_path,'model.json')
print(OKGREEN+json_path+ENDC)
model_json = self.model.to_json()
with open(json_path, "w") as json_file:
json_file.write(model_json)
# serialize weights to HDF5
weight_file = os.path.join(base_path,"model.h5")
print(OKGREEN+weight_file+ENDC)
self.model.save_weights(weight_file)
print("Saved model to disk")
def load_model(self,base_path="."):
# load json and create model
json_path = os.path.join(base_path,'model.json')
print(OKGREEN+json_path+ENDC)
json_file = open(json_path, 'r')
loaded_model_json = json_file.read()
json_file.close()
self.model = model_from_json(loaded_model_json)
# load weights into new model
weight_file = os.path.join(base_path,"model.h5")
print(OKGREEN+weight_file+ENDC)
self.model.load_weights(weight_file)
print(OKGREEN+"Loaded model from disk"+ENDC)