resnet(Deep Residual Learning for Image Recognition )
resnet的提出解决了网络加深后的退化问题.
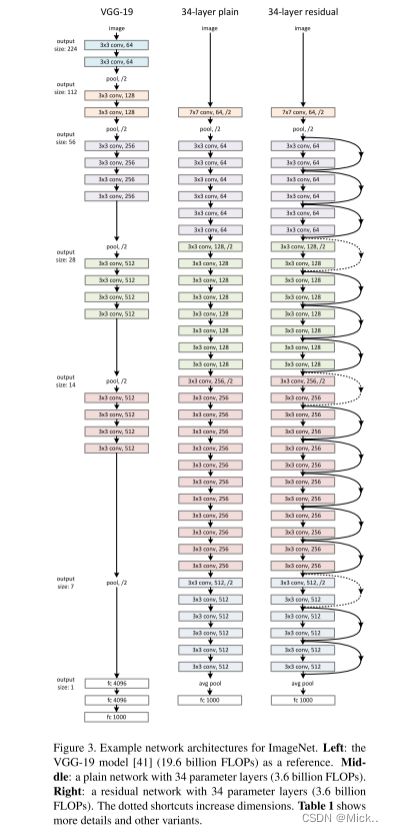
vgg-net的两条构建准则:1 特征图尺寸一样的时候,滤波器的个数相同 2 特征图尺寸减半,滤波器的个数加倍。
上面的网络结构都是在stage的第一个卷积核通过步长为2 进行下采样。
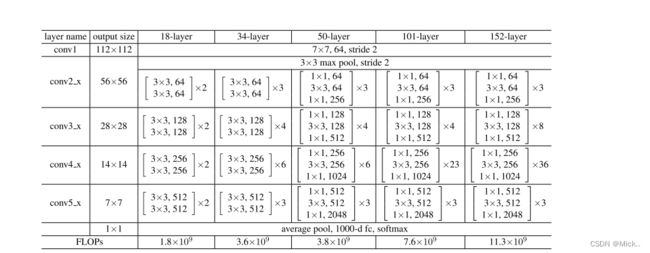
resnet的两种构建块。左边的是常规残差块。右边的是瓶颈残差块。左右两边主要都具有相同的计算复杂度,右边的用于深层网络结构,1*1卷积主要是用于降维(达到与右边相同的计算复杂度。)

"""resnet in pytorch
[1] Kaiming He, Xiangyu Zhang, Shaoqing Ren, Jian Sun.
Deep Residual Learning for Image Recognition
https://arxiv.org/abs/1512.03385v1
"""
import torch
import torch.nn as nn
class BasicBlock(nn.Module):
"""Basic Block for resnet 18 and resnet 34
"""
#BasicBlock and BottleNeck block
#have different output size
#we use class attribute expansion
#to distinct
expansion = 1
def __init__(self, in_channels, out_channels, stride=1):
super().__init__()
#residual function
self.residual_function = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels * BasicBlock.expansion, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(out_channels * BasicBlock.expansion)
)
#shortcut
self.shortcut = nn.Sequential()
#the shortcut output dimension is not the same with residual function
#use 1*1 convolution to match the dimension
if stride != 1 or in_channels != BasicBlock.expansion * out_channels:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, out_channels * BasicBlock.expansion, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(out_channels * BasicBlock.expansion)
)
def forward(self, x):
return nn.ReLU(inplace=True)(self.residual_function(x) + self.shortcut(x))
class BottleNeck(nn.Module):
"""Residual block for resnet over 50 layers
"""
expansion = 4
def __init__(self, in_channels, out_channels, stride=1):
super().__init__()
self.residual_function = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels, stride=stride, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels * BottleNeck.expansion, kernel_size=1, bias=False),
nn.BatchNorm2d(out_channels * BottleNeck.expansion),
)
self.shortcut = nn.Sequential()
if stride != 1 or in_channels != out_channels * BottleNeck.expansion:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, out_channels * BottleNeck.expansion, stride=stride, kernel_size=1, bias=False),
nn.BatchNorm2d(out_channels * BottleNeck.expansion)
)
def forward(self, x):
return nn.ReLU(inplace=True)(self.residual_function(x) + self.shortcut(x))
class ResNet(nn.Module):
def __init__(self, block, num_block, num_classes=100):
super().__init__()
self.in_channels = 64
self.conv1 = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True))
#we use a different inputsize than the original paper
#so conv2_x's stride is 1
self.conv2_x = self._make_layer(block, 64, num_block[0], 1)
self.conv3_x = self._make_layer(block, 128, num_block[1], 2)
self.conv4_x = self._make_layer(block, 256, num_block[2], 2)
self.conv5_x = self._make_layer(block, 512, num_block[3], 2)
self.avg_pool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes)
def _make_layer(self, block, out_channels, num_blocks, stride):
"""make resnet layers(by layer i didnt mean this 'layer' was the
same as a neuron netowork layer, ex. conv layer), one layer may
contain more than one residual block
Args:
block: block type, basic block or bottle neck block
out_channels: output depth channel number of this layer
num_blocks: how many blocks per layer
stride: the stride of the first block of this layer
Return:
return a resnet layer
"""
# we have num_block blocks per layer, the first block
# could be 1 or 2, other blocks would always be 1
strides = [stride] + [1] * (num_blocks - 1)
layers = []
for stride in strides:
layers.append(block(self.in_channels, out_channels, stride))
self.in_channels = out_channels * block.expansion
return nn.Sequential(*layers)
def forward(self, x):
output = self.conv1(x)
output = self.conv2_x(output)
output = self.conv3_x(output)
output = self.conv4_x(output)
output = self.conv5_x(output)
output = self.avg_pool(output)
output = output.view(output.size(0), -1)
output = self.fc(output)
return output
def resnet18():
""" return a ResNet 18 object
"""
return ResNet(BasicBlock, [2, 2, 2, 2])
def resnet34():
""" return a ResNet 34 object
"""
return ResNet(BasicBlock, [3, 4, 6, 3])
def resnet50():
""" return a ResNet 50 object
"""
return ResNet(BottleNeck, [3, 4, 6, 3])
def resnet101():
""" return a ResNet 101 object
"""
return ResNet(BottleNeck, [3, 4, 23, 3])
def resnet152():
""" return a ResNet 152 object
"""
return ResNet(BottleNeck, [3, 8, 36, 3])
if __name__=='__main__':
from torchinfo import summary
model=resnet18()
x=torch.rand(1,3,224,224)
out=model(x)
summary(model,x.shape)参考文献:
重读《Deep Residual Learning for Image Recognition》之进一步理解残差网络的神秘(附Pytorch代码)_NorthSmile的博客-CSDN博客详解残差网络 - 知乎 (zhihu.com)