2021-08-17 opencv c++学习笔记
opencv学习教程
- 加载图像(用cv::imread)
- 修改图像色彩空间 (cv::cvtColor)
- 保存图像(cv::imwrite)
- Mat
-
- cv::Mat::Mat构造函数
- 图像混合
- 调整图像亮度与对比度
- 绘制形状与文字
- 模糊原理
- 膨胀与腐蚀
- 采样
加载图像(用cv::imread)
imread功能是加载图像文件成为一个Mat对象,其中第一个参数表示图像文件名称(绝对名称);
第二个参数,表示加载的图像是什么类型,支持常见的三个参数值
IMREAD_UNCHANGED (<0) 表示加载原图,不做任何改变
IMREAD_GRAYSCALE ( 0)表示把原图作为灰度图像加载进来
IMREAD_COLOR (>0) 表示把原图作为RGB图像加载进来
注意:1.OpenCV支持JPG、PNG、TIFF等常见格式图像文件加载
2. 第二个参数可以直接是用数字代替
Mat src= imread(“D:/b.jpeg”,IMREAD_GRAYSCALE );
修改图像色彩空间 (cv::cvtColor)
cvtColor的功能是把图像从一个彩色空间转换到另外一个色彩空间,有三个参数,第一个参数表示源图像、第二参数表示色彩空间转换之后的图像、第三个参数表示源和目标色彩空间如:COLOR_BGR2HLS 、COLOR_BGR2GRAY(灰度图像) 等;
lcvtColor( image, gray_image, COLOR_BGR2GRAY );
保存图像(cv::imwrite)
保存图像文件到指定目录路径
只有8位、16位的PNG、JPG、Tiff文件格式而且是单通道或者三通道的BGR的图像才可以通过这种方式保存,第一个参数表示保存图像的地址,第二个参数表示要保存的图片。
imwrite("…/1.png",src);
Mat
部分复制:一般情况下只会复制Mat对象的头和指针部分,不会复制数据部分
Mat A= imread(imgFilePath);
Mat B(A) // 只复制
完全复制:如果想把Mat对象的头部和数据部分一起复制,可以通过如下两个API实现
Mat F = A.clone();
或 Mat G; A.copyTo(G);
输出图像的内存是自动分配的,使用OpenCV的C++接口,不需要考虑内存分配问题。
赋值操作和拷贝构造函数只会复制头部分,
使用clone与copyTo两个函数实现数据完全复制
cv::Mat::Mat构造函数
Mat M(2,2,CV_8UC3, Scalar(0,0,255))
其中前两个参数分别表示行(row)跟列(column)、第三个CV_8UC3中的8表示每个通道占8位、U表示无符号、C表示Char类型、3表示通道数目是3,第四个参数是向量表示初始化每个像素值是多少,向量长度对应通道数目一致。
int sz[[3]] = {2,2,2};
Mat L(3,sz, CV_8UC1, Scalar::all(0));
Mat矩阵初始化
#include “cv.hpp”
using namespace cv;
int main()
{ //创建240行x320行的图像
Mat img(240,320, CV_8U,100);
imshow(“img”, img);
//重新分配图像
img.create(200, 200, CV_8U);
img = 200;
imshow(“img new”, img);
//创建一个红色的图像
//通道次序为BGR
Mat img2(240,320,CV_8SC3,Scalar(0,0,255));
imshow(“BGR”, img2);
//或者
//Mat img(Size(320,240), CV_8UC3);
//img = Scalar(0,0,255);
waitKey();
return 0;
}
图像混合


调整图像亮度与对比度

Mat new_image = Mat::zeros( image.size(), image.type() ); 创建一张跟原图像大小和类型一致的空白图像、像素值初始化为0
lsaturate_cast(value)确保值大小范围为0~255之间
Mat.at(y,x)[index]=value 给每个像素点每个通道赋值
#include "cv.hpp"
#include
#include
#include
using namespace cv;
using namespace std;
int main()
{
Mat input, output;
input = imread("../0.jpg");
imshow("input", input);
int height = input.rows;
int width = input.cols;
double alpha = 1.2;
double beta = 50;
output = Mat::zeros(input.size(),input.type());
for (int y = 0; y < height; y++)
for (int x = 0; x < width; x++)
{
output.at(y, x)[0] = saturate_cast(alpha*input.at(y, x)[0] + beta);//blue
output.at(y, x)[1] = saturate_cast(alpha*input.at(y, x)[1] + beta);//blue
output.at(y, x)[2] = saturate_cast(alpha*input.at(y, x)[2] + beta);//blue
}
imshow("output", output);
waitKey();
}
绘制形状与文字
Point表示2D平面上一个点x,y
Point p;
p.x = 10;
p.y = 8;
p = Pont(10,8);
Scalar表示三个元素的向量
Scalar(a, b, c);// a = blue, b = green, c = red表示RGB三个通道
画线 cv::line (LINE_4\LINE_8\LINE_AA)
画椭圆cv::ellipse
画矩形cv::rectangle
画圆cv::circle
画填充cv::fillPoly
模糊原理
Smooth/Blur 是图像处理中最简单和常用的操作之一,使用该操作的原因之一就为了给图像预处理时候减低噪声,使用Smooth/Blur操作其背后是数学的卷积计算,通常这些卷积算子计算都是线性操作,所以又叫线性滤波。


中值滤波,统计排序滤波器,中值对椒盐噪声有很好的抑制作用。
中值模糊:medianBlur(Mat src, Mat dest, ksize)
中值模糊的ksize大小必须是大于1而且必须是奇数。
双边滤波
均值模糊无法克服边缘像素信息丢失缺陷。原因是均值滤波是基于平均权重。
高斯模糊部分克服了该缺陷,但是无法完全避免,因为没有考虑像素值的不同。
高斯双边模糊 – 是边缘保留的滤波方法,避免了边缘信息丢失,保留了图像轮廓不变。
双边模糊bilateralFilter(src, dest, d=15, 150, 3);
15 –计算的半径,半径之内的像数都会被纳入计算,如果提供-1 则根据sigma space参数取值。
150 – sigma color 决定多少差值之内的像素会被计算。
3 – sigma space 如果d的值大于0则声明无效,否则根据它来计算d值
#include "cv.hpp"
#include<iostream>
#include<ctime>
#include<random>
using namespace cv;
using namespace std;
int main()
{
Mat input, output1, output2, output3, output4;
input = imread("../sa.bmp");
imshow("input", input);
blur(input, output1, Size(15, 15), Point(-1, -1));//均值滤波
GaussianBlur(input,output2,Size(11,11),5,5);//高斯滤波
medianBlur(input, output3, 3);//中值滤波
bilateralFilter(input,output4,15,150,10);//双边滤波
imshow("output1", output1);
imshow("output2", output2);
imshow("output3", output3);
imshow("output4", output4);
waitKey();
}
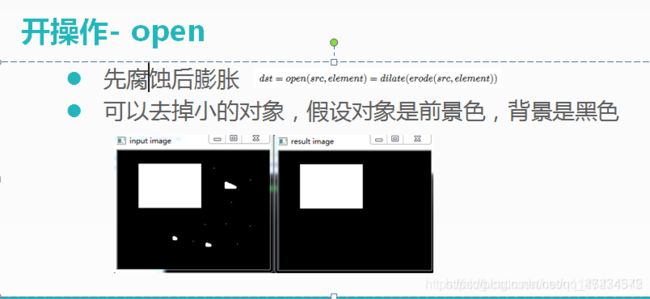
膨胀与腐蚀
膨胀:跟卷积操作类似,假设有图像A和结构元素B,结构元素B在A上面移动,其中B定义其中心为锚点,计算B覆盖下A的最大像素值用来替换锚点的像素,其中B作为结构体可以是任意形状.
腐蚀:腐蚀跟膨胀操作的过程类似,唯一不同的是以最小值替换锚点重叠下图像的像素值。
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
Mat src, dst; // 全局变量
int element_size = 3; //全局变量
int max_size = 21; // 全局变量
void CallBack_func(int, void*);
int main( )
{
src = imread("test7.png");
if (src.empty())
{
printf("could not load the image...\n");
return -1;
}
namedWindow("原图:", CV_WINDOW_AUTOSIZE);
imshow("原图:", src);
namedWindow("膨胀操作后:", CV_WINDOW_AUTOSIZE);
createTrackbar("结构元尺寸 :", "膨胀操作后:", &element_size, max_size, CallBack_func);//创建一个滑动条
CallBack_func(element_size, 0);
waitKey(0);
return 0;
}
void CallBack_func(int, void*)
{
int s = element_size * 2 + 1;
Mat structureElement = getStructuringElement(MORPH_RECT, Size(s, s), Point(-1, -1)); //创建结构元
dilate(src, dst, structureElement, Point(-1, -1), 1); //调用膨胀API
imshow("膨胀操作后:", dst);
}
其中 结构元形状函数:
getStructuringElement( int shape, Size ksize, Point anchor )
其参数解释如下:
shape:1)MORPH_RECT 表示产生矩形的结构元
2)MORPH_ELLIPSEM 表示产生椭圆形的结构元
3)MORPH_CROSS 表示产生十字交叉形的结构元
ksize:表示结构元的尺寸,即(宽,高),必须是奇数
anchor:表示结构元的锚点,即参考点。默认值Point(-1, -1)代表中心像素为锚点.
dilate(src, dst, structureElement, Point(-1, -1), 1);
src:表示输入矩阵
dst: 表示输出矩阵
element:表示结构元,即 函数getStructuringElement( )的返回值
anchor:结构元的锚点,即参考点(-1,-1)
iterations:膨胀操作的次数,默认为一次



采样
上采样(cv::pyrUp) – zoom in 放大
降采样 (cv::pyrDown) – zoom out 缩小
pyrUp(Mat src, Mat dst, Size(src.cols2, src.rows2)),生成的图像是原图在宽与高各放大两倍
pyrDown(Mat src, Mat dst, Size(src.cols/2, src.rows/2))生成的图像是原图在宽与高各缩小1/2