多旋翼飞行器设计与控制(四) —— 动力系统建模与估计
多旋翼飞行器设计与控制(四) —— 动力系统建模与估计
总体描述
动力系统建模分为四部分:螺旋桨建模、电机建模、电调建模和电池建模。
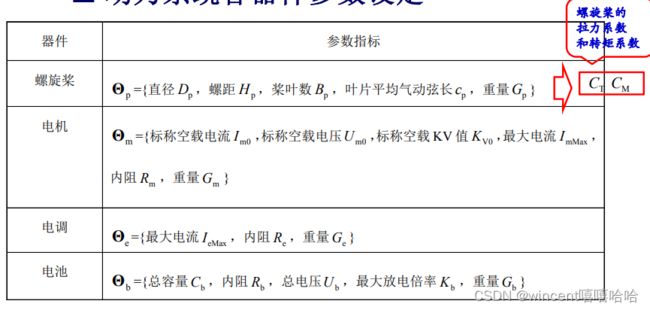
动力系统各器件参数设定
求解悬停时间的总体思路
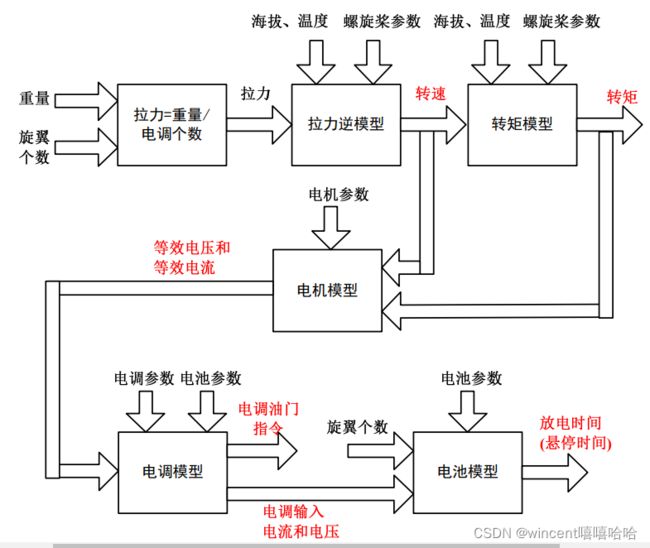
动力系统模型
1、螺旋桨模型
拉力模型:
T = C T ρ ( N 60 ) 2 D p 4 T = C_T\rho (\frac{N}{60})^2 D{^4_p} T=CTρ(60N)2Dp4
C T 为 螺 旋 桨 拉 力 系 数 , ρ 为 空 气 密 度 , N 为 转 速 , D p 为 螺 旋 桨 直 径 C_T为螺旋桨拉力系数, \rho为空气密度 ,N为转速, D_p为螺旋桨直径 CT为螺旋桨拉力系数,ρ为空气密度,N为转速,Dp为螺旋桨直径
拉力逆模型:
N = 60 T D p 4 C T ρ N = 60\sqrt{\frac{T}{D{^4_pC_T \rho}}} N=60Dp4CTρT
T = G n r T = \frac{G}{n_r} T=nrG
G 为 飞 机 重 量 , n r 为 螺 旋 桨 个 数 G为飞机重量, n_r为螺旋桨个数 G为飞机重量,nr为螺旋桨个数
通过拉力逆模型可以将所需的拉力转换为螺旋桨转速
转矩模型:
M = C M ρ ( N 60 ) 2 D p 5 C M 为 螺 旋 桨 转 矩 系 数 M = C_M \rho (\frac{N}{60})^2 D{^5_p} ~~~~ ~~~~~C_M为螺旋桨转矩系数 M=CMρ(60N)2Dp5 CM为螺旋桨转矩系数
将 拉 力 逆 模 型 代 入 上 式 可 以 得 M = C M G n r C T D p 将拉力逆模型代入上式可以得 ~~~~~ M = C_M \frac{G}{n_rC_T} D_p 将拉力逆模型代入上式可以得 M=CMnrCTGDp
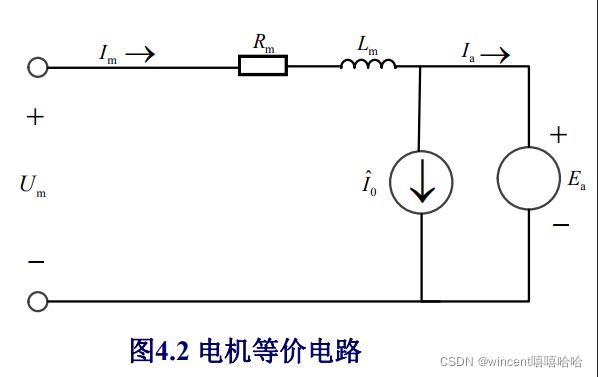
2、电机模型
无刷直流电机等价电路图
电磁转矩模型:
T e = K T I m T_e = K_T I_m Te=KTIm
K T = 60 2 π K E = 9.55 K E K_T = \frac{60}{2\pi} K_E = 9.55K_E KT=2π60KE=9.55KE
K E = U m 0 − I m 0 R m K V 0 U m 0 K_E = \frac{U_{m0} - I_{m0}R_m}{K_{V0}U_{m0}} KE=KV0Um0Um0−Im0Rm
T e 是 电 磁 转 矩 , K T 是 电 机 转 矩 常 熟 , I m 是 电 枢 电 流 T_e是电磁转矩,K_T是电机转矩常熟,I_m是电枢电流 Te是电磁转矩,KT是电机转矩常熟,Im是电枢电流
等效电流模型:
I m = M K T + I m 0 I_m = \frac{M}{K_T}+I_{m0} Im=KTM+Im0
其 中 M 为 拉 力 逆 模 型 得 到 的 转 矩 , I m 0 为 空 载 电 流 其中M为拉力逆模型得到的转矩 ,I_{m0}为空载电流 其中M为拉力逆模型得到的转矩,Im0为空载电流
等效电压模型:
U m = K E N + R m I m U_m = K_EN+R_mI_m Um=KEN+RmIm
其 中 N 为 拉 力 逆 模 型 得 到 的 转 速 其中N为拉力逆模型得到的转速 其中N为拉力逆模型得到的转速
3、电调模型
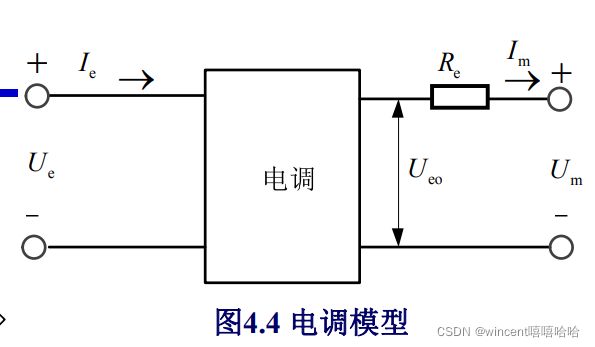
U e o = U m + I m R e U_{eo} = U_m +I_mR_e Ueo=Um+ImRe
σ = U e o U e ≈ U e o U b \sigma = \frac{U_{eo}}{U_e} \approx \frac{U_{eo}}{U_b} σ=UeUeo≈UbUeo
其 中 σ 为 输 入 油 门 指 令 , U b 为 电 池 电 压 其中 \sigma 为输入油门指令, U_b 为电池电压 其中σ为输入油门指令,Ub为电池电压
I e = σ I m I_e = \sigma I_m Ie=σIm
输 入 电 压 即 电 池 输 出 电 压 U e = U b − n r T e R b 输入电压即电池输出电压~~~~~~ U_e = U_b - n_rT_eR_b 输入电压即电池输出电压 Ue=Ub−nrTeRb
其 中 n r 为 电 调 个 数 , R b 为 电 池 内 阻 其中n_r为电调个数 ,R_b为电池内阻 其中nr为电调个数,Rb为电池内阻
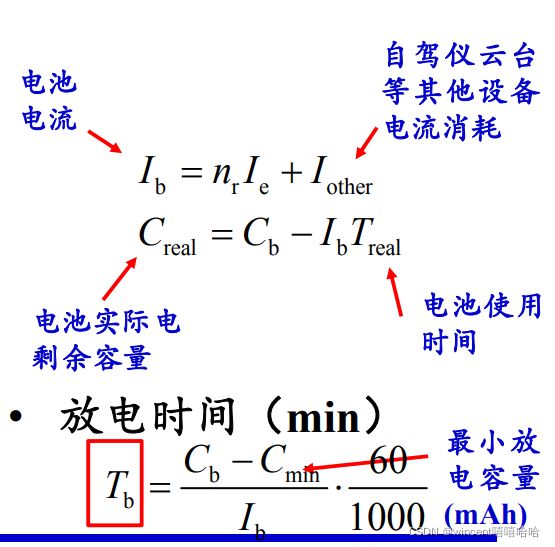
4、电池模型
电池建模对电池实际放电过程进行简化,假设放电过程中电压保持不变,悬停电流为定值,电池的放电能力呈线性变