- Cartographer_01: 使用CLion配置Cartographer_Superbuild
鬼马汤圆
cartographerubuntudebug
使用CLion配置Cartographer_Superbuild笔者计算机新手,尝试使用CLiondebugCartographer,其间遇到多方困难,最后使用github上一位大佬写的Cartographer_Superbuild成功debug。特此记录,以防忘记。首先,配置,操作系统:Ubuntu18.04LTSRos:MelodicIDE:CLion2020.2.4debug代码:Carto
- 黑客发现新漏洞:Windows容器隔离框架可助其绕过端点安全
真想骂*
windows安全
近期,网络安全领域再次传来令人担忧的消息。DeepInstinct的安全研究员DanielAvinoam在DEFCON安全大会上揭示了一项惊人的发现:黑客可以利用Windows容器隔离框架的漏洞,绕过端点安全系统,从而执行恶意操作。这一发现无疑为全球的网络安全防护提出了新的挑战。Windows容器隔离框架,作为Microsoft容器架构的重要组成部分,其设计初衷是通过动态生成的映像将文件系统从每个
- 如何用JavaScript判断前端应用运行环境(移动平台还是桌面环境)
在多模态模型的架构上,ChatGPT的绘图能力主要依赖以下几个核心组件:跨模态编码器(Cross-ModalEncoder):跨模态编码器的作用是将文本和图像的特征进行对齐。GPT可以将用户输入的文本描述转换为文本特征表示,然后利用跨模态编码器将这些特征映射到图像特征空间。这种方式确保模型能够理解描述性语言中不同细节是如何与图像特征对应的。
- matlab mle 优化,MLE+: Matlab Toolbox for Integrated Modeling, Control and Optimization for Buildings...
Simon Zhong
matlabmle优化
摘要:FollowingunilateralopticnervesectioninadultPVGhoodedrat,theaxonguidancecueephrin-A2isup-regulatedincaudalbutnotrostralsuperiorcolliculus(SC)andtheEphA5receptorisdown-regulatedinaxotomisedretinalgan
- Python实现下载当前年份的谷歌影像
sand&wich
python开发语言
在GIS项目和地图应用中,获取最新的地理影像数据是非常重要的。本文将介绍如何使用Python代码从Google地图自动下载当前年份的影像数据,并将其保存为高分辨率的TIFF格式文件。这个过程涉及地理坐标转换、多线程下载和图像处理。关键功能该脚本的核心功能包括:坐标转换:支持WGS-84与WebMercator投影之间转换,以及处理中国GCJ-02偏移。自动化下载:多线程下载地图瓦片,提高效率。图像
- Spring Boot中实现跨域请求
BABA8891
springboot后端java
在SpringBoot中实现跨域请求(CORS,Cross-OriginResourceSharing)可以通过多种方式,以下是几种常见的方法:1.使用@CrossOrigin注解在SpringBoot中,你可以在控制器或者具体的请求处理方法上使用@CrossOrigin注解来允许跨域请求。在控制器上应用:importorg.springframework.web.bind.annotation.
- rose中原焦点团队网络初级27期、中级27期分享第201天20211019
rosewshx
今天出差回来上班,很多事情又都拥挤到了一起,列表排序逐一落实吧。排出来心里就不慌乱了,稳得住事情去逐一解决。调整烦躁慌乱的心态,平稳住按部就班就好,让觉察时时在。
- 【Golang】使用 Golang 语言和 excelize 库将数据写入Excel
不爱洗脚的小滕
golangexcel开发语言
文章目录前言一、Excelize简介二、代码实现1.获取依赖2.示例代码三、总结前言在数据处理和分析中,Excel作为一种常见的电子表格格式,被广泛应用于各种场景。然而,如何在Go语言中有效地处理Excel文件呢?在这篇博客中,我将介绍如何使用Go语言和excelize库将数据写入Excel文件。一、Excelize简介Excelize是一个用于读取和写入MicrosoftExcel™(XLSX)
- ArcGIS Pro SDK (十四)地图探索 5 时间与动画
WineMonk
ArcGISProSDKarcgisarcgisprosdkgisc#
ArcGISProSDK(十四)地图探索5时间与动画文章目录ArcGISProSDK(十四)地图探索5时间与动画1时间1.1时间提前1个月1.2禁用地图中的时间。2动画2.1设置动画长度2.2缩放动画2.3相机关键帧2.4插值相机2.5插值时间2.6插值范围2.7创建摄像机关键帧2.8创建时间关键帧2.9创建范围关键帧2.10创建图层关键帧环境:VisualStudio2022+.NET6+Arc
- python中zeros用法_Python中的numpy.zeros()用法
江平舟
python中zeros用法
numpy.zeros()函数是最重要的函数之一,广泛用于机器学习程序中。此函数用于生成包含零的数组。numpy.zeros()函数提供给定形状和类型的新数组,并用零填充。句法numpy.zeros(shape,dtype=float,order='C'参数形状:整数或整数元组此参数用于定义数组的尺寸。此参数用于我们要在其中创建数组的形状,例如(3,2)或2。dtype:数据类型(可选)此参数用于
- 【NumPy】深入解析numpy.zeros()函数
二七830
numpy
欢迎莅临我的个人主页这里是我深耕Python编程、机器学习和自然语言处理(NLP)领域,并乐于分享知识与经验的小天地!博主简介:我是二七830,一名对技术充满热情的探索者。多年的Python编程和机器学习实践,使我深入理解了这些技术的核心原理,并能够在实际项目中灵活应用。尤其是在NLP领域,我积累了丰富的经验,能够处理各种复杂的自然语言任务。技术专长:我熟练掌握Python编程语言,并深入研究了机
- 神经网络-损失函数
红米煮粥
神经网络人工智能深度学习
文章目录一、回归问题的损失函数1.均方误差(MeanSquaredError,MSE)2.平均绝对误差(MeanAbsoluteError,MAE)二、分类问题的损失函数1.0-1损失函数(Zero-OneLossFunction)2.交叉熵损失(Cross-EntropyLoss)3.合页损失(HingeLoss)三、总结在神经网络中,损失函数(LossFunction)扮演着至关重要的角色,它
- 管理员权限的软件不能开机自启动的解决方法
ss_ctrl
这是几种解决方法:1.将启动参数写入到32位注册表里面去在64位系统下我们64位的程序访问此HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\Windows\CurrentVersion\Run注册表路径,是可以正确访问的,32位程序访问此注册表路径时,默认会被系统自动映射到HKEY_LOCAL_MACHINE\SOFTWARE\WOW6432Node\Microsoft
- 静态常量(static const)|| 日志记录器
课堂随想
moveit2机器人
//AllsourcefilesthatuseROSloggingshoulddefineafile-specific//staticconstrclcpp::LoggernamedLOGGER,locatedatthetopofthefile//andinsidethenamespacewiththenarrowestscope(ifthereisone)staticconstrclcpp::L
- 在Flask中实现跨域请求(CORS)
ac-er8888
flaskpython后端
在Flask中实现跨域请求(CORS,Cross-OriginResourceSharing)主要涉及到对Flask应用的配置,以允许来自不同源的请求访问服务器上的资源。以下是在Flask中实现CORS的详细步骤和方法:一、理解CORSCORS是一种机制,它使用额外的HTTP头部来告诉浏览器,让运行在一个origin(域)上的Web应用被准许访问来自不同源服务器上的指定的资源。当一个资源从与该资源
- SAP B1 Web Client & MS Teams App集成连载一:先决条件/Prerequisites
哲讯智能科技
大数据科技
一、先决条件/Prerequisites在设置SAPBusinessOne应用之前,确保您已具备以下各项:BeforeyousetuptheSAPBusinessOneapp,makesureyouhaveacquiredthefollowing:1.MicrosoftTeams管理员账户/AMicrosoftTeamsadminaccount您需要使用此账户为贵组织上传、安装、升级和卸载应用Th
- PCL 点云视窗类CloudViewer
LeonDL168
PCL算法计算机视觉人工智能视觉检测图像处理
点云视窗类CloudViewer是简单显示点云的可视化工具类,可以让用户用尽可能少的代码查看点云。注意:点云视窗类不能应用于多线程应用程序中。简单点云可视化如果用户想用几行代码可视化程序中所对应的地物,可以使用下面的代码:#include//...voidfoo(){pcl::PointCloud::Ptrcloud;//...为cloud添加对应的场景pcl::visualization::Cl
- PCL 怎样可视化深度图像
LeonDL168
PCL计算机视觉人工智能视觉检测图像处理算法
本小节讲解如何可视化深度图像的两种方法,在3D视窗中以点云形式进行可视化(深度图像来源于点云),另一种是,将深度值映射为颜色,从而以彩色图像方式可视化深度图像。代码首先,在PCL(PointCloudLearning)中国协助发行的书提供光盘的第7章例2文件夹中,打开名为range_image_visualization.cpp的代码文件,同文件夹下可以找到相关的测试点云文件room_scan1.
- ros2中使用launch.xml启动时,怎么在命令行里设置参数,或者加载参数文件(params.yaml)
code .
Autoware自动驾驶ROS2xmlRos2自动驾驶机器人
在ROS2中使用launch.xml启动时,可以通过命令行设置参数或加载参数文件(如params.yaml)。以下是具体的方法:1.在命令行中设置参数你可以在运行ros2launch命令时直接设置参数,使用key:=value的语法。例如:ros2launchparam_name:=param_value例如,如果你有一个参数background_r,你可以这样设置:ros2launchmy_pa
- QCMA:开源的PS Vita内容管理新选择
瞿格女
QCMA:开源的PSVita内容管理新选择qcmaCross-platformcontentmanagerassistantforthePSVita(Nolongermaintained)项目地址:https://gitcode.com/gh_mirrors/qc/qcma随着游戏界的日新月异,对于那些怀旧的游戏玩家而言,PSVita仍然是一颗璀璨的明珠。为了让更多人能够自由地管理自己的游戏和媒体
- 美国专利申请常用加快审查程序
察尔斯格伦
美国专利商标局(USPTO)针对专利申请人的不同需求开展了多种方式的加快审查。今天我们来聊一聊更为常用的专利申请高速公路(PatentProsecutionHighway,PPH)和优先审查(PrioritizedExamination,TrackOne)程序。一、专利申请高速公路(PPH)专利申请高速公路是适用于不同国家的知识产权局之间的加速审查通道,其根据是美国参与的双边和多边协议。根据专利申
- Visual Studio中的Android模拟器使用详解
wurui8
androidandroidstudioandroidandroid应用
关注微信号:javalearns随时随地学Java或扫一扫随时随地学JavaMicrosoft本周发布了VisualStudio2015预览版,里面包含Android开发工具.安装的时候,如果选Android开发,VisualStudio会把调试Android应用程序用的VisualStudio模拟器也装上.在介绍这个新模拟器之前,我们先来聊一聊,为什么需要一个新的Android模拟器–当然,你也
- Open3D 实现CSF布料模拟算法
今夕是何年,
单目+双目Open3d计算机视觉
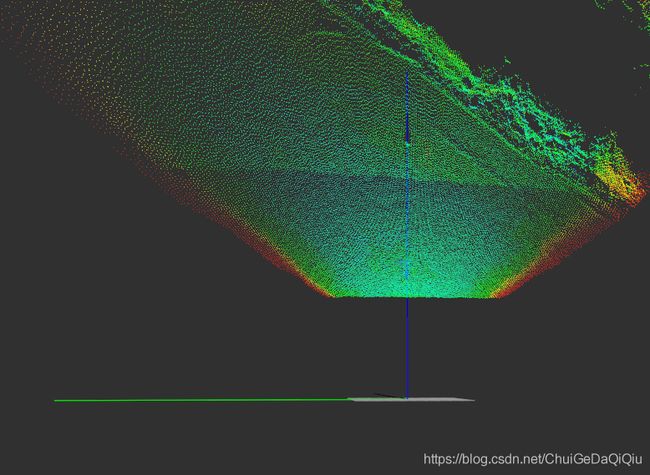
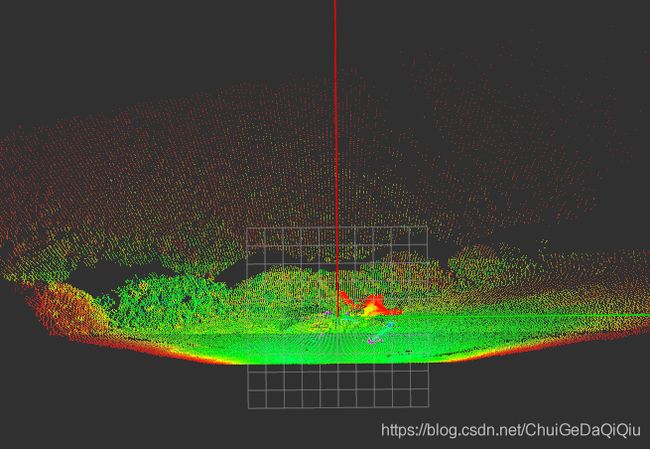
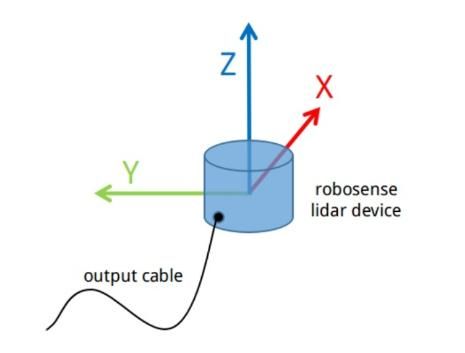
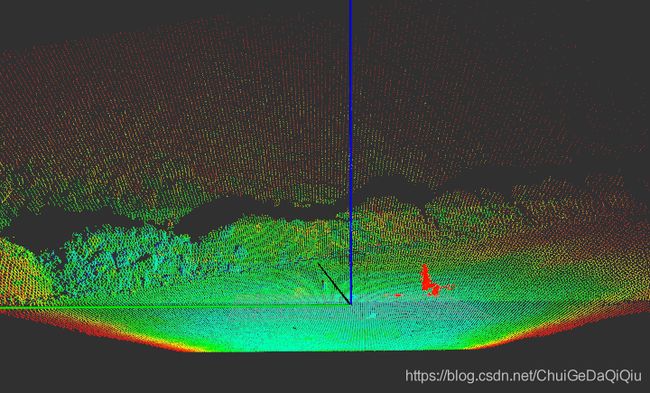
目录一、算法原理二,详细过程三,环境安装四,代码实现五,结果展示6,在cloudcompare中的实现一、算法原理1、流程概述1)利用点云·滤波算法或者点云处理软件滤除异常点;2)将激光雷达点云倒置;3)设置模拟布料,设置布料网格分辨率GR,确定模拟粒子数。布料的位置设置在点云最高点以上;4)将布料模拟点和雷达点投影到水平面,为每个布料模拟点找到最相邻的激光点的高度值,将高度值设置为IHV;5)布
- Microsoft Defender SmartScreen 阻止了无法识别的应用启动。运行此应用可能会导致你的电脑存在风险。
开心呆哥
microsoft
你提到的情况可能是由于Windows的安全策略导致的。当你运行批处理文件(.bat)时,Windows可能会弹出一次提示,询问是否允许该文件执行。这是为了确保用户不会意外地运行潜在的恶意脚本。有几种方法可以解决这个问题:解锁文件:在文件资源管理器中,找到你的.bat文件。右键单击文件,选择"属性"。在"常规"选项卡中,如果有一个"解锁"复选框,请勾选它。确定并尝试重新运行文件。以管理员身份运行:右
- Mac上有哪些虚拟机软件?性能兼容性都怎么样该如何下载安装
Hot1422
macoswindows
Mac上常用的虚拟机软件大概有三个,一个是VMwareFusionVM虚拟机,一个是ParallelsDesktopPD虚拟机,还有一个是CrossOver其中PD与VM都是纯正的虚拟机软件,通过安装windows操作系统来运行windows软件,而CrossOver是无需安装操作系统的,但兼容性比较差,下面详细介绍一下:ParallelsDesktop(PD虚拟机)PD虚拟机对于RAM架构的Ma
- SQLServer2022新特性 GENERATE_SERIES函数
zxrhhm
sqlserver数据库
SQLServer2022新特性GENERATE_SERIES函数,在给定间隔内生成一系列数字。序列值之间的间隔和步骤由用户定义。参考官方地址https://learn.microsoft.com/en-us/sql/t-sql/functions/generate-series-transact-sql?view=sql-server-ver161、本文内容语法参数返回类型权限示例相关内容适用于
- SQL server CROSS JOIN 的用法
潇锐killer
数据库sql
SELECT@DateThresholdasdt,t3.ck_id,t3.ck_name,t3.title_id,t3.title,casewhent4.numisnullthen0elset4.numendnum,casewhent4.moneyisnullthen0elset4.moneyendmoney,t3.startDay,t3.endDayfrom(SELECTt1.ck_id,t1.
- sql中的APPLY 和 LATERAL
鲨鱼辣椒ii
sqlsql
简介APPLY是sqlserver的内容,LATERAL和pgsql的内容,用起来是类似的,名字不太一样apply两种方式:OUTERAPPLY和CROSSAPPY,分别对应做链接和自链接
- EulerOS配置yum源以及安装内核头文件
带你一起提升
linuxcentos运维
yum的主要配置文件是/etc/yum.conf,这个文件里面包含“main”部分,保存着yum的全局设置;也可以包含一个或者多个repository部分,用来设置需要安装的软件源位置。在/etc/yum.repos.d目录中有一些repo源相关文件,它们定义了各个仓库。yum的配置一般有两种方式,(1)直接配置/etc目录下的yum.conf文件。(2)在/etc/yum.repos.d目录下增
- Apache POI用法
JH3073
apache
一、ApachePOI是什么ApachePOI是用Java编写的免费开源的跨平台的JavaAPI,ApachePOI提供API给Java程序对MicrosoftOffice格式档案读和写的功能,其中使用最多的就是使用POI操作Excel文件。二、POI结构HSSF-提供读写MicrosoftExcelXLS格式档案的功能XSSF-提供读写MicrosoftExcelOOXMLXLSX格式档案的功能
- 集合框架
天子之骄
java数据结构集合框架
集合框架
集合框架可以理解为一个容器,该容器主要指映射(map)、集合(set)、数组(array)和列表(list)等抽象数据结构。
从本质上来说,Java集合框架的主要组成是用来操作对象的接口。不同接口描述不同的数据类型。
简单介绍:
Collection接口是最基本的接口,它定义了List和Set,List又定义了LinkLi
- Table Driven(表驱动)方法实例
bijian1013
javaenumTable Driven表驱动
实例一:
/**
* 驾驶人年龄段
* 保险行业,会对驾驶人的年龄做年龄段的区分判断
* 驾驶人年龄段:01-[18,25);02-[25,30);03-[30-35);04-[35,40);05-[40,45);06-[45,50);07-[50-55);08-[55,+∞)
*/
public class AgePeriodTest {
//if...el
- Jquery 总结
cuishikuan
javajqueryAjaxWebjquery方法
1.$.trim方法用于移除字符串头部和尾部多余的空格。如:$.trim(' Hello ') // Hello2.$.contains方法返回一个布尔值,表示某个DOM元素(第二个参数)是否为另一个DOM元素(第一个参数)的下级元素。如:$.contains(document.documentElement, document.body); 3.$
- 面向对象概念的提出
麦田的设计者
java面向对象面向过程
面向对象中,一切都是由对象展开的,组织代码,封装数据。
在台湾面向对象被翻译为了面向物件编程,这充分说明了,这种编程强调实体。
下面就结合编程语言的发展史,聊一聊面向过程和面向对象。
c语言由贝尔实
- linux网口绑定
被触发
linux
刚在一台IBM Xserver服务器上装了RedHat Linux Enterprise AS 4,为了提高网络的可靠性配置双网卡绑定。
一、环境描述
我的RedHat Linux Enterprise AS 4安装双口的Intel千兆网卡,通过ifconfig -a命令看到eth0和eth1两张网卡。
二、双网卡绑定步骤:
2.1 修改/etc/sysconfig/network
- XML基础语法
肆无忌惮_
xml
一、什么是XML?
XML全称是Extensible Markup Language,可扩展标记语言。很类似HTML。XML的目的是传输数据而非显示数据。XML的标签没有被预定义,你需要自行定义标签。XML被设计为具有自我描述性。是W3C的推荐标准。
二、为什么学习XML?
用来解决程序间数据传输的格式问题
做配置文件
充当小型数据库
三、XML与HTM
- 为网页添加自己喜欢的字体
知了ing
字体 秒表 css
@font-face {
font-family: miaobiao;//定义字体名字
font-style: normal;
font-weight: 400;
src: url('font/DS-DIGI-e.eot');//字体文件
}
使用:
<label style="font-size:18px;font-famil
- redis范围查询应用-查找IP所在城市
矮蛋蛋
redis
原文地址:
http://www.tuicool.com/articles/BrURbqV
需求
根据IP找到对应的城市
原来的解决方案
oracle表(ip_country):
查询IP对应的城市:
1.把a.b.c.d这样格式的IP转为一个数字,例如为把210.21.224.34转为3524648994
2. select city from ip_
- 输入两个整数, 计算百分比
alleni123
java
public static String getPercent(int x, int total){
double result=(x*1.0)/(total*1.0);
System.out.println(result);
DecimalFormat df1=new DecimalFormat("0.0000%");
- 百合——————>怎么学习计算机语言
百合不是茶
java 移动开发
对于一个从没有接触过计算机语言的人来说,一上来就学面向对象,就算是心里上面接受的了,灵魂我觉得也应该是跟不上的,学不好是很正常的现象,计算机语言老师讲的再多,你在课堂上面跟着老师听的再多,我觉得你应该还是学不会的,最主要的原因是你根本没有想过该怎么来学习计算机编程语言,记得大一的时候金山网络公司在湖大招聘我们学校一个才来大学几天的被金山网络录取,一个刚到大学的就能够去和
- linux下tomcat开机自启动
bijian1013
tomcat
方法一:
修改Tomcat/bin/startup.sh 为:
export JAVA_HOME=/home/java1.6.0_27
export CLASSPATH=$CLASSPATH:$JAVA_HOME/lib/tools.jar:$JAVA_HOME/lib/dt.jar:.
export PATH=$JAVA_HOME/bin:$PATH
export CATALINA_H
- spring aop实例
bijian1013
javaspringAOP
1.AdviceMethods.java
package com.bijian.study.spring.aop.schema;
public class AdviceMethods {
public void preGreeting() {
System.out.println("--how are you!--");
}
}
2.beans.x
- [Gson八]GsonBuilder序列化和反序列化选项enableComplexMapKeySerialization
bit1129
serialization
enableComplexMapKeySerialization配置项的含义
Gson在序列化Map时,默认情况下,是调用Key的toString方法得到它的JSON字符串的Key,对于简单类型和字符串类型,这没有问题,但是对于复杂数据对象,如果对象没有覆写toString方法,那么默认的toString方法将得到这个对象的Hash地址。
GsonBuilder用于
- 【Spark九十一】Spark Streaming整合Kafka一些值得关注的问题
bit1129
Stream
包括Spark Streaming在内的实时计算数据可靠性指的是三种级别:
1. At most once,数据最多只能接受一次,有可能接收不到
2. At least once, 数据至少接受一次,有可能重复接收
3. Exactly once 数据保证被处理并且只被处理一次,
具体的多读几遍http://spark.apache.org/docs/lates
- shell脚本批量检测端口是否被占用脚本
ronin47
#!/bin/bash
cat ports |while read line
do#nc -z -w 10 $line
nc -z -w 2 $line 58422>/dev/null2>&1if[ $?-eq 0]then
echo $line:ok
else
echo $line:fail
fi
done
这里的ports 既可以是文件
- java-2.设计包含min函数的栈
bylijinnan
java
具体思路参见:http://zhedahht.blog.163.com/blog/static/25411174200712895228171/
import java.util.ArrayList;
import java.util.List;
public class MinStack {
//maybe we can use origin array rathe
- Netty源码学习-ChannelHandler
bylijinnan
javanetty
一般来说,“有状态”的ChannelHandler不应该是“共享”的,“无状态”的ChannelHandler则可“共享”
例如ObjectEncoder是“共享”的, 但 ObjectDecoder 不是
因为每一次调用decode方法时,可能数据未接收完全(incomplete),
它与上一次decode时接收到的数据“累计”起来才有可能是完整的数据,是“有状态”的
p
- java生成随机数
cngolon
java
方法一:
/**
* 生成随机数
* @author
[email protected]
* @return
*/
public synchronized static String getChargeSequenceNum(String pre){
StringBuffer sequenceNum = new StringBuffer();
Date dateTime = new D
- POI读写海量数据
ctrain
海量数据
import java.io.FileOutputStream;
import java.io.OutputStream;
import org.apache.poi.xssf.streaming.SXSSFRow;
import org.apache.poi.xssf.streaming.SXSSFSheet;
import org.apache.poi.xssf.streaming
- mysql 日期格式化date_format详细使用
daizj
mysqldate_format日期格式转换日期格式化
日期转换函数的详细使用说明
DATE_FORMAT(date,format) Formats the date value according to the format string. The following specifiers may be used in the format string. The&n
- 一个程序员分享8年的开发经验
dcj3sjt126com
程序员
在中国有很多人都认为IT行为是吃青春饭的,如果过了30岁就很难有机会再发展下去!其实现实并不是这样子的,在下从事.NET及JAVA方面的开发的也有8年的时间了,在这里在下想凭借自己的亲身经历,与大家一起探讨一下。
明确入行的目的
很多人干IT这一行都冲着“收入高”这一点的,因为只要学会一点HTML, DIV+CSS,要做一个页面开发人员并不是一件难事,而且做一个页面开发人员更容
- android欢迎界面淡入淡出效果
dcj3sjt126com
android
很多Android应用一开始都会有一个欢迎界面,淡入淡出效果也是用得非常多的,下面来实现一下。
主要代码如下:
package com.myaibang.activity;
import android.app.Activity;import android.content.Intent;import android.os.Bundle;import android.os.CountDown
- linux 复习笔记之常见压缩命令
eksliang
tar解压linux系统常见压缩命令linux压缩命令tar压缩
转载请出自出处:http://eksliang.iteye.com/blog/2109693
linux中常见压缩文件的拓展名
*.gz gzip程序压缩的文件
*.bz2 bzip程序压缩的文件
*.tar tar程序打包的数据,没有经过压缩
*.tar.gz tar程序打包后,并经过gzip程序压缩
*.tar.bz2 tar程序打包后,并经过bzip程序压缩
*.zi
- Android 应用程序发送shell命令
gqdy365
android
项目中需要直接在APP中通过发送shell指令来控制lcd灯,其实按理说应该是方案公司在调好lcd灯驱动之后直接通过service送接口上来给APP,APP调用就可以控制了,这是正规流程,但我们项目的方案商用的mtk方案,方案公司又没人会改,只调好了驱动,让应用程序自己实现灯的控制,这不蛋疼嘛!!!!
发就发吧!
一、关于shell指令:
我们知道,shell指令是Linux里面带的
- java 无损读取文本文件
hw1287789687
读取文件无损读取读取文本文件charset
java 如何无损读取文本文件呢?
以下是有损的
@Deprecated
public static String getFullContent(File file, String charset) {
BufferedReader reader = null;
if (!file.exists()) {
System.out.println("getFull
- Firebase 相关文章索引
justjavac
firebase
Awesome Firebase
最近谷歌收购Firebase的新闻又将Firebase拉入了人们的视野,于是我做了这个 github 项目。
Firebase 是一个数据同步的云服务,不同于 Dropbox 的「文件」,Firebase 同步的是「数据」,服务对象是网站开发者,帮助他们开发具有「实时」(Real-Time)特性的应用。
开发者只需引用一个 API 库文件就可以使用标准 RE
- C++学习重点
lx.asymmetric
C++笔记
1.c++面向对象的三个特性:封装性,继承性以及多态性。
2.标识符的命名规则:由字母和下划线开头,同时由字母、数字或下划线组成;不能与系统关键字重名。
3.c++语言常量包括整型常量、浮点型常量、布尔常量、字符型常量和字符串性常量。
4.运算符按其功能开以分为六类:算术运算符、位运算符、关系运算符、逻辑运算符、赋值运算符和条件运算符。
&n
- java bean和xml相互转换
q821424508
javabeanxmlxml和bean转换java bean和xml转换
这几天在做微信公众号
做的过程中想找个java bean转xml的工具,找了几个用着不知道是配置不好还是怎么回事,都会有一些问题,
然后脑子一热谢了一个javabean和xml的转换的工具里,自己用着还行,虽然有一些约束吧 ,
还是贴出来记录一下
顺便你提一下下,这个转换工具支持属性为集合、数组和非基本属性的对象。
packag
- C 语言初级 位运算
1140566087
位运算c
第十章 位运算 1、位运算对象只能是整形或字符型数据,在VC6.0中int型数据占4个字节 2、位运算符: 运算符 作用 ~ 按位求反 << 左移 >> 右移 & 按位与 ^ 按位异或 | 按位或 他们的优先级从高到低; 3、位运算符的运算功能: a、按位取反: ~01001101 = 101
- 14点睛Spring4.1-脚本编程
wiselyman
spring4
14.1 Scripting脚本编程
脚本语言和java这类静态的语言的主要区别是:脚本语言无需编译,源码直接可运行;
如果我们经常需要修改的某些代码,每一次我们至少要进行编译,打包,重新部署的操作,步骤相当麻烦;
如果我们的应用不允许重启,这在现实的情况中也是很常见的;
在spring中使用脚本编程给上述的应用场景提供了解决方案,即动态加载bean;
spring支持脚本