使用OSQP解决二次凸优化(QP)问题
什么是二次凸优化问题
可以转化成满足如下方程的优化问题B被称为二次凸优化(QP)问题。
min_x 0.5 * x'Px + q'x
s.t. l <= Ax <= u
其中P是对称正定矩阵。所以目标函数的全局最小值就是其极小值。在二维的情况下,目标函数的图像类似下面的图。这样大概有一个印象就好。

约束类型可以是等式约束和不等式约束。
当需要设置等式约束时可以将需要相等的行设置为l[i] == u[i] 。
单侧的不等式约束,可以将最小或最大侧设置成无穷小或无穷大。
如何构造二次凸优化(QP)问题
这是一个比较大的问题。将很多实际的问题进行数学建模,然后转成凸优化问题。这样就能解了。这里仅说明一下这样的思路。
如何解二次凸优化(QP)问题
这里介绍如何使用OSQP库进行求解。
我已经将依赖的库合在一起了。可以在这里下载https://github.com/shoufei403/OSQP
使用osqp库和osqp-eigen库。osqp-eigen库是对osqp库的封装,其提供了更好用的eigen接口。
主要使用的接口如下:
// set the initial data of the QP solver
//矩阵A为m*n矩阵
solver.data()->setNumberOfVariables(NumberOfVariables); //设置A矩阵的列数,即n
solver.data()->setNumberOfConstraints(NumberOfConstraints); //设置A矩阵的行数,即m
if(!solver.data()->setHessianMatrix(hessian)) return 1;//设置P矩阵
if(!solver.data()->setGradient(gradient)) return 1; //设置q or f矩阵。当没有时设置为全0向量
if(!solver.data()->setLinearConstraintsMatrix(linearMatrix)) return 1;//设置线性约束的A矩阵
if(!solver.data()->setLowerBound(lowerBound)) return 1;//设置下边界
if(!solver.data()->setUpperBound(upperBound)) return 1;//设置上边界
下面的实例来源于https://ww2.mathworks.cn/help/optim/ug/quadprog.html?s_tid=srchtitle
- 具有线性约束的二次规划
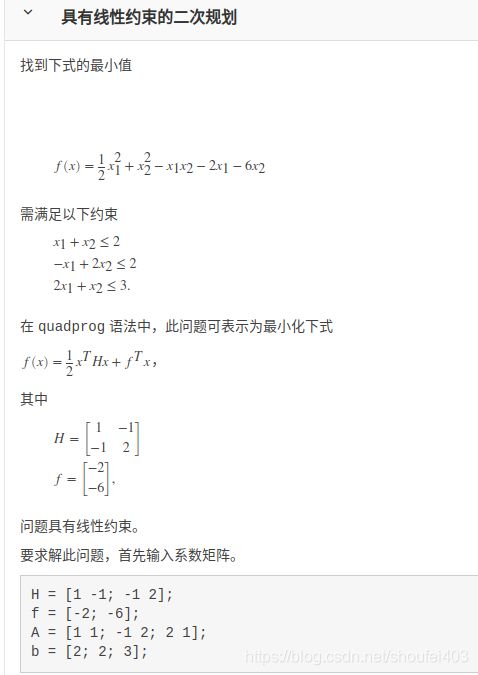
hessian.resize(2,2);
hessian.insert(0,0) = 1;
hessian.insert(1,0) = -1;
hessian.insert(0,1) = -1;
hessian.insert(1,1) = 2;
std::cout << "hessian:" << std::endl << hessian << std::endl;
gradient.resize(2);
gradient << -2, -6;
std::cout << "gradient:" << std::endl << gradient << std::endl;
linearMatrix.resize(3,2);
linearMatrix.insert(0,0) = 1;
linearMatrix.insert(0,1) = 1;
linearMatrix.insert(1,0) = -1;
linearMatrix.insert(1,1) = 2;
linearMatrix.insert(2,0) = 2;
linearMatrix.insert(2,1) = 1;
std::cout << "linearMatrix:" << std::endl << linearMatrix << std::endl;
lowerBound.resize(3);
lowerBound << -OsqpEigen::INFTY, -OsqpEigen::INFTY, -OsqpEigen::INFTY;
std::cout << "lowerBound:" << std::endl << lowerBound << std::endl;
upperBound.resize(3);
upperBound << 2, 2, 3;
std::cout << "upperBound:" << std::endl << upperBound << std::endl;
int NumberOfVariables = 2; //A矩阵的列数
int NumberOfConstraints = 3; //A矩阵的行数
- 具有线性等式约束的二次规划

hessian.resize(2,2);
hessian.insert(0,0) = 1;
hessian.insert(1,0) = -1;
hessian.insert(0,1) = -1;
hessian.insert(1,1) = 2;
std::cout << "hessian:" << std::endl << hessian << std::endl;
gradient.resize(2);
gradient << -2, -6;
std::cout << "gradient:" << std::endl << gradient << std::endl;
linearMatrix.resize(1,2);
linearMatrix.insert(0,0) = 1;
linearMatrix.insert(0,1) = 1;
std::cout << "linearMatrix:" << std::endl << linearMatrix << std::endl;
lowerBound.resize(1);
lowerBound << 0;
std::cout << "lowerBound:" << std::endl << lowerBound << std::endl;
upperBound.resize(1);
upperBound << 0;
std::cout << "upperBound:" << std::endl << upperBound << std::endl;
int NumberOfVariables = 2; //A矩阵的列数
int NumberOfConstraints = 1; //A矩阵的行数
- 具有线性约束和边界的二次最小化

该问题即包含了等式约束也包含了不等式约束。写成矩阵形式如下:
[ 0 0 0 0.5 ] < = [ 1 0 0 0 1 0 0 0 1 1 1 1 ] [ x 1 x 2 x 3 ] < = [ 1 1 1 0.5 ] \begin{bmatrix} 0\\ 0\\ 0\\ 0.5 \end{bmatrix} <= \begin{bmatrix} 1& 0& 0\\ 0& 1& 0\\ 0& 0& 1\\ 1& 1& 1 \end{bmatrix} \begin{bmatrix} x_1\\ x_2\\ x_3 \end{bmatrix} <=\begin{bmatrix} 1\\ 1\\ 1\\ 0.5 \end{bmatrix} ⎣⎢⎢⎡0000.5⎦⎥⎥⎤<=⎣⎢⎢⎡100101010011⎦⎥⎥⎤⎣⎡x1x2x3⎦⎤<=⎣⎢⎢⎡1110.5⎦⎥⎥⎤
hessian.resize(3,3);
hessian.insert(0,0) = 1;
hessian.insert(1,0) = -1;
hessian.insert(2,0) = 1;
hessian.insert(0,1) = -1;
hessian.insert(1,1) = 2;
hessian.insert(2,1) = -2;
hessian.insert(0,2) = 1;
hessian.insert(1,2) = -2;
hessian.insert(2,2) = 4;
std::cout << "hessian:" << std::endl << hessian << std::endl;
gradient.resize(3);
gradient << 2, -3, 1;
std::cout << "gradient:" << std::endl << gradient << std::endl;
linearMatrix.resize(4,3);
linearMatrix.insert(0,0) = 1;
linearMatrix.insert(1,0) = 0;
linearMatrix.insert(2,0) = 0;
linearMatrix.insert(3,0) = 1;
linearMatrix.insert(0,1) = 0;
linearMatrix.insert(1,1) = 1;
linearMatrix.insert(2,1) = 0;
linearMatrix.insert(3,1) = 1;
linearMatrix.insert(0,2) = 0;
linearMatrix.insert(1,2) = 0;
linearMatrix.insert(2,2) = 1;
linearMatrix.insert(3,2) = 1;
std::cout << "linearMatrix:" << std::endl << linearMatrix << std::endl;
lowerBound.resize(4);
lowerBound << 0, 0, 0, 0.5;
std::cout << "lowerBound:" << std::endl << lowerBound << std::endl;
upperBound.resize(4);
upperBound << 1, 1, 1, 0.5;
std::cout << "upperBound:" << std::endl << upperBound << std::endl;
int NumberOfVariables = 3; //A矩阵的列数
int NumberOfConstraints = 4; //A矩阵的行数
遇到的问题
- 编译osqp-eigen库时报下面的错误:
CMake Error at cmake/OsqpEigenDependencies.cmake:12 (find_package):
Could not find a configuration file for package "Eigen3" that is compatible
with requested version "3.2.92".
The following configuration files were considered but not accepted:
/usr/lib/cmake/eigen3/Eigen3Config.cmake, version: unknown
Call Stack (most recent call first):
CMakeLists.txt:63 (include)
解决措施:需要将原来旧的eigen库删掉,重新按照最新的eigen库。
sudo rm -rf /usr/include/eigen3
sudo rm -rf /usr/lib/cmake/eigen3
重新安装eigen,注意要安装到原来的位置/usr/include,不然catkin_make会报错。
mkdir build
cd build
cmake .. -DCMAKE_INSTALL_PREFIX=/usr
sudo make install
- 编译osqp-eigen库时报
target_compile_features specified unknown feature cxx_std_14 for target错误。
解决措施:将cmake升级到3.14版本后可以正常编译。但是sudo apt remove cmake时,把很多ros的库也删掉了,导致roscore都运行不了。
其实将CMakeList.txt文件更改一下就好了:
add_definitions(-std=c++14) #添加这一行
#target_compile_features(${LIBRARY_TARGET_NAME} PUBLIC cxx_std_14) #注释这一行
- 使用osqp-eigen库时出现这样的问题:
In file included from /usr/local/include/OsqpEigen/OsqpEigen.h:10:0,
from /catkin_ws/src/MinimumSnap-Trajectory-Generation/waypoint_trajectory_generator/src/trajectory_generator_osqp.cpp:10:
/usr/local/include/OsqpEigen/Constants.hpp:12:18: fatal error: osqp.h: No such file or directory
这是因为头文件的包含路径有问题。按下图方式更改osqp-eigen库头文件,再重新编译安装。

Solver.tpp文件中对osqp库头文件的引用要改成下面的方式
#include
#include
- 运行程序链接osqp库时报错。
error while loading shared libraries: libosqp.so: cannot open shared object file: No such file or directory
解决措施:需要添加相应的链接地址
···
sudo vim /etc/ld.so.conf
···
在里面添加一行
/usr/local/lib
最后再执行一下下面的语句
sudo /sbin/ldconfig
- 运行链接了osqp库和OsqpEigen的程序时,总是会报
Segmentation fault (core dumped)。
发现是CMakeLists的写法不同导致的。
原来自己的写法是:
set(ADDITIONAL_CXX_FLAG "-Wall -O3 -march=native") //事实上是这一条不能加
target_link_libraries(trajectory_generator_node_test
qdldl
osqp
OsqpEigen
)
官方的例子是这样写的。
cmake_minimum_required(VERSION 3.1)
set (CMAKE_CXX_STANDARD 11)
project(OsqpEigen-Example)
find_package(OsqpEigen)
find_package(Eigen3)
include_directories(SYSTEM ${EIGEN3_INCLUDE_DIR})
#MPCExample
add_executable(MPCExample src/MPCExample.cpp)
target_link_libraries(MPCExample OsqpEigen::OsqpEigen)
#Simple Example
add_executable(SimpleExample src/simpleqp_example.cpp)
target_link_libraries(SimpleExample OsqpEigen::OsqpEigen)
参照官方的例子写就正常了。
关注公众号《首飞》回复“机器人”获取精心推荐的C/C++,Python,Docker,Qt,ROS1/2等机器人行业常用技术资料。