【台大林轩田《机器学习基石》笔记】Lecture 7——The VC Dimension
文章目录
- Lecture 7:The VC Dimension
-
- Definition of VC Dimension
- VC Dimension of Perceptrons
- Physical Intuition of VC Dimension
- Interpreting VC Dimension
Lecture 7:The VC Dimension
Definition of VC Dimension
定义:VC Dimension d v c = k − 1 d_{vc}=k-1 dvc=k−1,其中k是之前提到的break point
也就是指假设集合 H \mathcal H H最大能够shatter的点的个数

再来回顾下之前介绍过的例子:
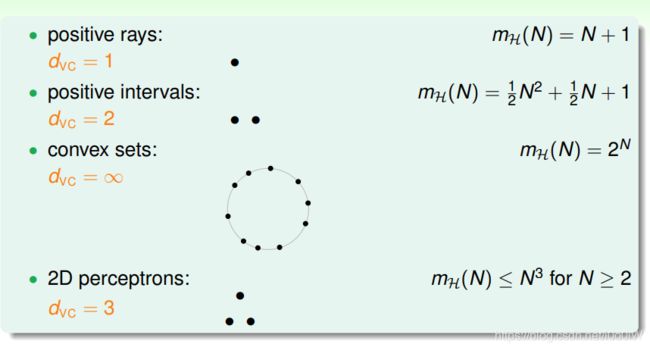
如果一个假设集合的 d v c d_{vc} dvc确定了之后,那么能保证能够进行机器学习的第一个条件 E i n ≈ E o u t E_{in}\approx E_{out} Ein≈Eout,与算法选择、数据分布和目标函数都没有关系
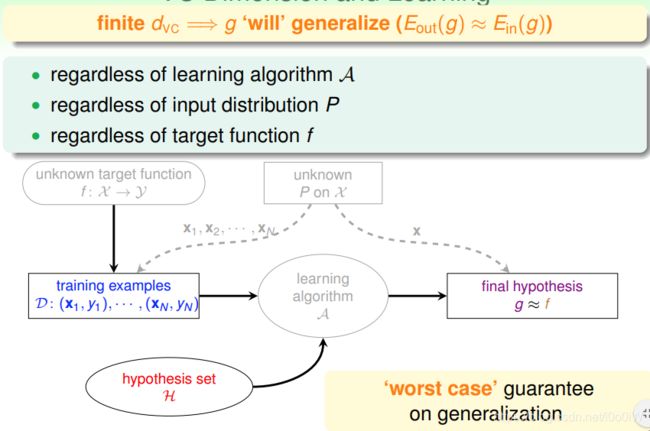
(这一部分大概就是把之前讲过的东西重新定义了一下)
VC Dimension of Perceptrons
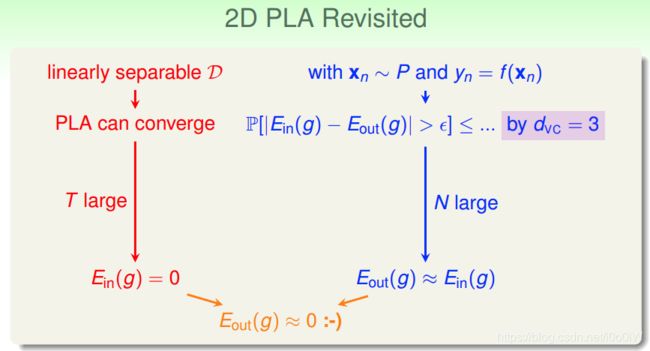
回顾之前介绍的2D PLA,这个算法的可行性其实有两条线,分别对应两个条件:
- 如果数据集是线性可分的,那么PLA是能够停止的,如果经历足够多的迭代次数,那么最终会找到理想假设 g , E i n ( g ) = 0 g,E_{in}(g)=0 g,Ein(g)=0
- 如果 N N N足够大,而且2D Perceptron存在 d v c = 3 d_{vc}=3 dvc=3,根据之前介绍的理论,是能够保证 E o u t ( g ) ≈ E i n ( g ) E_{out}(g)\approx E_{in}(g) Eout(g)≈Ein(g)的
这是在2D情况下,如果在更高维度的情况下, d v c d_{vc} dvc是多少?
猜想:感知机输入样本维度为 d d d,则 d v c = d + 1 d_{vc}=d+1 dvc=d+1
证明:
- d v c ≥ d + 1 d_{vc}\geq d+1 dvc≥d+1
假设每一个输入都是 d d d维的,我们只要能找到某种 d + 1 d+1 d+1个输入的组合可以被shatter,那么就能证明 d v c ≥ d + 1 d_{vc}\geq d+1 dvc≥d+1(这个根据 d v c d_{vc} dvc的定义就能知道),所以我们就构造这样一个输入:

这个矩阵有 d + 1 d+1 d+1个输入组成,每个输入在原来基础上在第0维加上常数项1(这就是之前讲2D Perceptron的 x 0 x_0 x0,也就是threshold)
这个矩阵显然是可逆的,也就是说所有的 d + 1 d+1 d+1个输入都能被shatter,第一个不等式就证明了
为什么说输入矩阵可逆就等同于这些输入能被shatter?我们说两个点被shatter,就是说假设集能够将这两个点分成(1,1),(1,-1),(-1,1),(-1,-1)四种结果
分类的结果可以看作一个向量 y = ( y 1 , y 2 , . . . , y n ) T y=(y_1,y_2,...,y_n)^T y=(y1,y2,...,yn)T,如果矩阵可逆,那么对任意一个向量 y y y,总能找到 w = X − 1 y w=X^{-1}y w=X−1y,也就是所有分类结果都能通过假设集得到,这就说明矩阵中的这 d + 1 d+1 d+1个输入能被shatter
- d v c ≤ d + 1 d_{vc}\leq d+1 dvc≤d+1
如果对任意 d + 2 d+2 d+2个输入,都不能被shatter,那么不等式就成立。
构造一个任意的矩阵 X X X,包含 d + 2 d+2 d+2个输入,每个输入都是 d + 1 d+1 d+1维,那么这些输入向量一定是线性相关的( n + 1 n+1 n+1个 n n n维向量一定是线性相关的),也就是说某个输入向量可以用其余向量表示,然后等式两边同乘 w T w^T wT,该输入的正负也随之确定,不存在可正可负两种可能,所以这些输入是无法被shatter的
比如下图蓝色代表正类,红色代表负类,那么 x d + 2 x_{d+2} xd+2一定是正类。这里有点反证法的思想,假设能shatter,那么就有一个 w T w^T wT,这个 w T w^T wT刚好对应下图举例的这种分类结果。

Physical Intuition of VC Dimension
VC Dimension代表了假设空间的表达能力,即反映了H的自由度。(因为 d v c d_{vc} dvc是假设集shatter的最大个数)

Interpreting VC Dimension
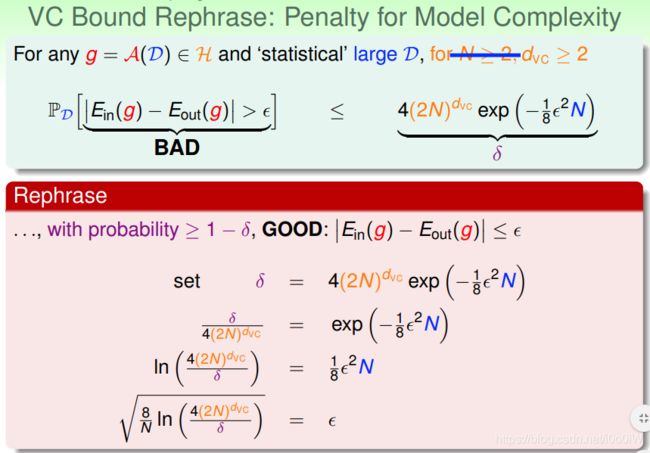
VC Bound:
之前的不等式说明了出现 ∣ E i n − E o u t ∣ > ϵ |E_{in}-E_{out}|>\epsilon ∣Ein−Eout∣>ϵ的情况的概率不超过 δ \delta δ,那么对于 ∣ E i n − E o u t ∣ ≤ ϵ |E_{in}-E_{out}|\leq\epsilon ∣Ein−Eout∣≤ϵ的情况重新推导不等式得到:
这个式子表现了假设集合的泛化能力:

我们更关心 E o u t E_{out} Eout的上界,也就是不等式组的右侧部分,根号这一项使用 Ω \Omega Ω表示,代表了模型惩罚项。可以理解成模型泛化误差的一种表示,也可以看作描述模型复杂度的量
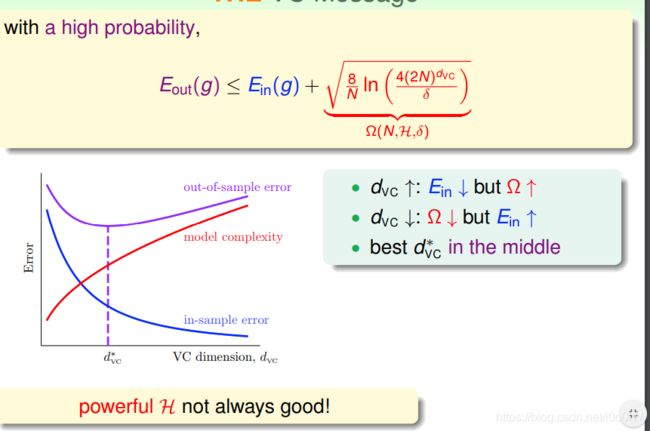
从上图可以得到结论,
d v c d_{vc} dvc增大,说明假设能shatter的点更多了,因此更有可能得到理想的分类,所以 E i n E_{in} Ein会降低,但模型更加复杂了(根据 d v c = d + 1 d_{vc}=d+1 dvc=d+1,增大了 d v c d_vc dvc也就是增加了features),根据不等式, E o u t E_{out} Eout可能会增大。
要选择合适的 d v c d_vc dvc,才能起到比较好的泛化能力。
(模型复杂参数多导致过拟合的思想)
下面介绍样本复杂度:
如果确定了 d v c d_{vc} dvc,那么样本数据选择多少才比较合适?
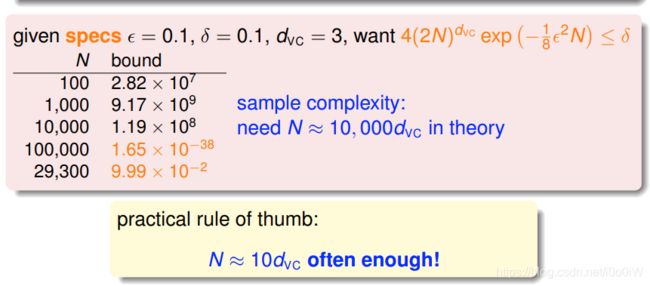
从这个例子当中, N ≈ 10000 d v c N\approx 10000d_{vc} N≈10000dvc,但是在实际中往往只需要 N ≈ 10 d v c N\approx 10d_{vc} N≈10dvc就可以了,之所以如此是因为VC Bound过于宽松了,我们得到的是一个比实际大得多的上界。
