机器学习 | 台大林轩田机器学习基石课程笔记8 --- Noise and Error
课程主页
课程视频和PPT
上一节课,我们主要介绍了VC Dimension的概念。如果Hypotheses set的VC Dimension是有限的,且有足够多N的数据,那么![]() ,同时能够找到一个hypothesis使它的
,同时能够找到一个hypothesis使它的 ,那么就能说明机器学习是可行的。本节课主要讲了数据集有Noise的情况下,是否能够进行机器学习,并且介绍了假设空间H下演算法A的Error估计。
,那么就能说明机器学习是可行的。本节课主要讲了数据集有Noise的情况下,是否能够进行机器学习,并且介绍了假设空间H下演算法A的Error估计。
目录
1. Noise and Probabistic target
2. ERROR Measure
3. Algorithmic Error Measure
4. Weighted Classification
5. 总结
1. Noise and Probabistic target
上节课推导VC Dimension的数据集是在没有Noise的情况下,本节课讨论如果数据集本身存在Noise,那VC Dimension的推导是否还成立呢?
首先,Data Sets的Noise一般有三种情况:
- 由于人为因素,正类被误分为负类,或者反之。(加标签的时候可能会出错)
- 同样特征的样本被模型分为不同的类
- 样本的特征被错误记录和使用

之前的数据集是确定的,即没有Noise的,我们称之为Deterministic。现在有Noise了,也就是说在某点处不再是确定分布,而是概率分布了,即对每个(x,y)出现的概率是 .
.
因为Noise的存在,比如在x点,有0.7的概率y=1,有0.3的概率y=0,即y是按照分布的。数学上可以证明如果数据集按照概率分布且是iid的,那么以前证明机器可以学习的方法依然奏效,VC Dimension有限即可推断 和
和 是近似的。
是近似的。
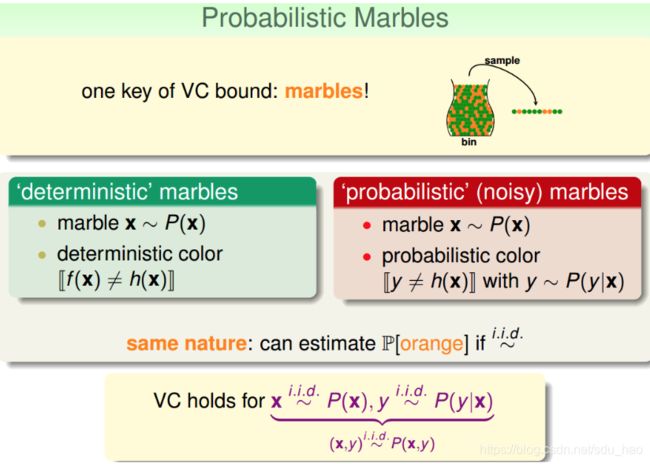
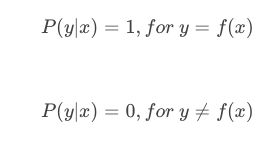
称之为目标分布(Target Distribution)。它实际上告诉我们最好的选择是什么,同时伴随着多少noise。其实,没有noise的数据仍然可以看成“特殊”的概率分布,即概率仅是1和0.对于以前确定的数据集(没有噪声):

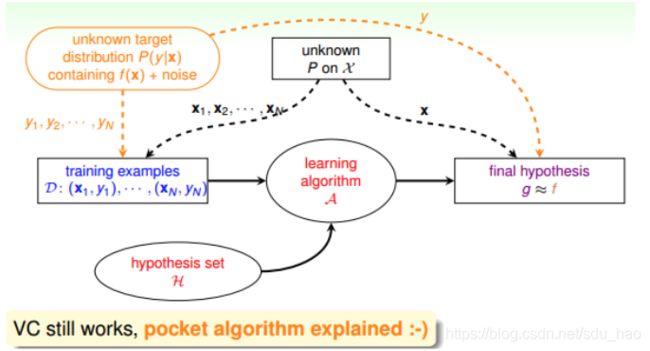
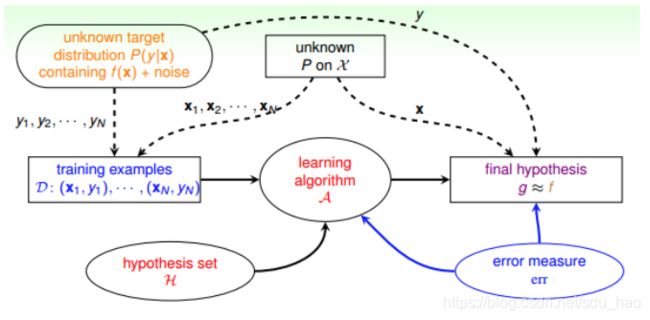
在引入noise的情况下,新的学习流程图如下所示:
2. ERROR Measure
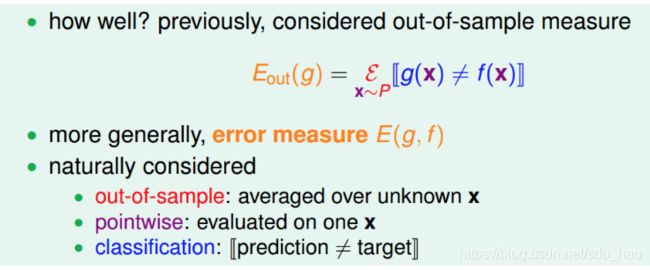
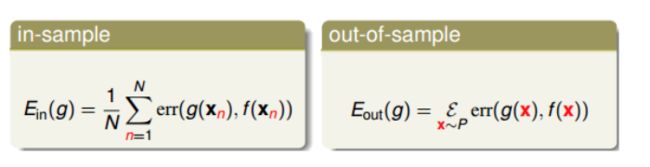
机器学习需要考虑的问题是找出的g与目标函数f有多相近,我们一直使用进行误差的估计,那一般的错误测量有哪些形式呢?
我们介绍的g对错误的衡量有三个特性:
- out-of-sample:样本外的未知数据
- pointwise:对每个数据点x进行测试
- classification:看prediction与target是否一致,classification error通常称为0/1 error
PointWise error实际上就是对数据集的每个点计算错误并计算平均,![]() 的pointwise error的表达式为:
的pointwise error的表达式为:
pointwise error是机器学习中最常用也是最简单的一种错误衡量方式,未来课程中,我们主要考虑这种方式。pointwise error一般可以分成两类:0/1 error和squared error。0/1 error通常用在分类(classification)问题上,而squared error通常用在回归(regression)问题上。

Ideal Mini-Target由和和err共同决定,0/1 error和squared error的Ideal Mini-Target计算方法不一样。例如下面这个例子,分别用0/1 error和squared error来估计最理想的mini-target是多少。0/1 error中的mini-target是取P(y|x)最大的那个类,而squared error中的mini-target是取所有类的加权平方和。

有了错误衡量,就会知道当前的g是好还是不好,并会让演算法不断修正,更新参数,使得错误减小,得到更好的g,从而使得g与目标函数更接近。所以,引入error measure后,学习流程图如下所示:
3. Algorithmic Error Measure
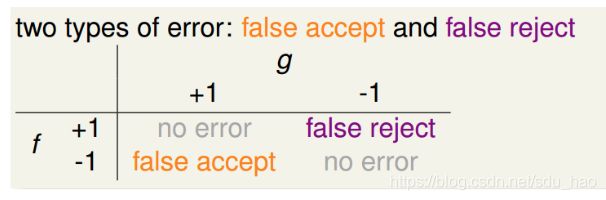
Error有两种:false accept和false reject。false accept意思是误把负类当成正类,false reject是误把正类当成负类。 根据不同的机器学习问题,false accept和false reject应该有不同的权重,这根实际情况是符合的,比如是超市优惠,那么false reject应该设的大一些;如果是安保系统,那么false accept应该设的大一些。
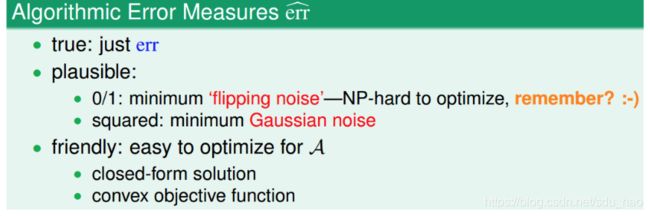
机器学习演算法A的cost function error估计有多种方法,真实的err一般难以计算,常用的方法可以采用plausible或者friendly,根据具体情况而定。
引入algorithm error measure之后,学习流程图如下:

4. Weighted Classification
实际上,机器学习的Cost Function即来自于这些error,也就是算法里面的迭代的目标函数,通过优化使得Error(Ein)不断变小。
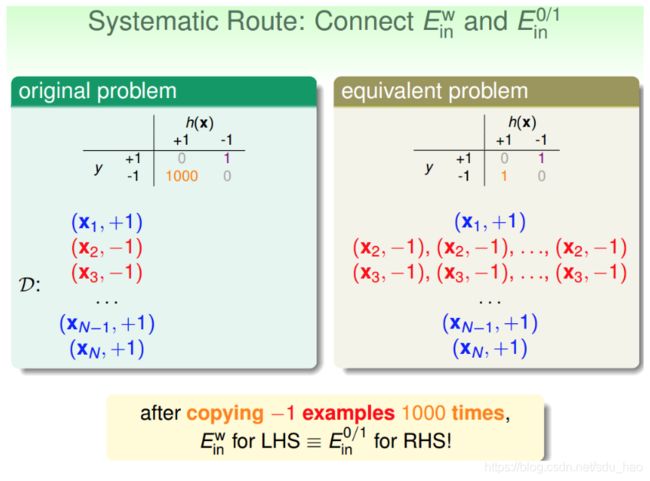
cost function中,false accept和false reject赋予不同的权重,在演算法中体现。对不同权重的错误惩罚,可以选用virtual copying的方法。

5. 总结
本节课主要讲了在有Noise的情况下,即数据集按照概率分布,那么VC Dimension仍然成立,机器学习算法推导仍然有效。机器学习cost function常用的Error有0/1 error和squared error两类。实际问题中,对false accept和false reject应该选择不同的权重。