- ROS学习笔记之深度相机仿真、小结
要好好养胃
ROS学习笔记人工智能机器学习c++
通过Gazebo模拟kinect摄像头,并在Rviz中显示kinect摄像头数据。实现流程:kinect摄像头仿真基本流程:已经创建完毕的机器人模型,编写一个单独的xacro文件,为机器人模型添加kinect摄像头配置;将此文件集成进xacro文件;启动Gazebo,使用Rviz显示kinect摄像头信息。1.Gazebo仿真Kinect1.1新建Xacro文件,配置kinetic传感器信息//这
- ROS学习笔记之摄像头仿真及显示
要好好养胃
ROS学习笔记人工智能机器学习c++
通过Gazebo模拟摄像头传感器,并在Rviz中显示摄像头数据。实现流程:摄像头仿真基本流程:已经创建完毕的机器人模型,编写一个单独的xacro文件,为机器人模型添加摄像头配置;将此文件集成进xacro文件;启动Gazebo,使用Rviz显示摄像头信息。1.Gazebo仿真摄像头1.1新建Xacro文件,配置摄像头传感器信息有几个要自行修改的地方,基本设置和laser有相同的部分,不做赘述。//实
- ROS学习笔记
xiyuping24
学习笔记机器人图论
下载使用鱼香ROS,一键下载十分好评~学习地址官网网站:ros.wiki调试打开终端,输入roscore,发现最后输出startcoreservice,说明安装成功尝试小海龟,打开另一个终端,输入rosrunturtlesimturtlesim_node,出现小海龟的窗口,说明成功其他小海龟玩法:小海龟画圆关于文件结构最高层是home中自己建的workspace,在里面应该有三大部分:buildd
- ROS学习笔记-roslaunch文件的编写&用sh脚本控制launch文件启动顺序
诗筱涵
ROS无人机-a-个人笔记
转载自:https://mp.weixin.qq.com/s?__biz=MzUyMTkxODQyOQ==&mid=2247484719&idx=1&sn=27b3a01c295ae256dc69d805fd5904ba&chksm=f9d2879dcea50e8b71b78d8b69750d282055173ea65494342e983088276859b7c4fe227f21f1&scene=
- ROS学习(5)可视化和调试工具一
敲代码的雪糕
ROSROS
文章目录前言一、调试ROS节点1、使用gdb调试器调试节点2、在节点启动时调用gdb调试器3、在节点启动时调用valgrind分析节点4、设置ROS节点core文件存储二、日志消息1.输出日志消息2.调试消息级别3.为特定节点配置调试消息级别4.消息命名5.按条件显示消息与过滤消息6.显示消息的方式7.使用rqt_console和rqt_logger_level在运行时修改调试级别总结前言ROS自
- 我的ROS学习笔记(四)
zenpluck
自动驾驶c++
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档publisher程序代码学习前言一、包含消息类型声明二、创建发布者对象三、创建并填充消息对象四、发布消息五、消息发布循环1.节点是否停止工作的检查2.控制消息发布频率总结前言发布者程序包含了很多之前不懂的知识,刚开始也许只能复制粘贴代码来运行实例,但最终目的还是为了自己能够编写这些代码。因此,弄明白哪部分代码是什么意思非常有必要,不
- 黄金票据 --- kerberos学习记录
B1ackMa9ic
学习网络网络攻击模型安全
文章目录Kerberos协议是怎么工作的一、黄金票据利用条件利用步骤Kerberos协议是怎么工作的这里首先要搞懂几个概念:认证服务器(AuthenticationServer,AS):负责首次身份验证和颁发TGT(TicketGrantingTicket)给用户。用户通过AS向Kerberos服务器发送身份验证请求,并在验证通过后获取TGT。授权票证颁发服务器(TicketGrantingSer
- 移动机器人激光SLAM导航(五):Cartographer SLAM 篇
Robot_Yue
自主探索导航学习SLAMCartographer工程化调参
参考Cartographer官方文档Cartographer从入门到精通1.Cartographer安装1.1前置条件推荐在刚装好的Ubuntu16.04或Ubuntu18.04上进行编译ROS安装:ROS学习1:ROS概述与环境搭建1.2依赖库安装资源下载完解压并执行以下指令https://pan.baidu.com/s/1LWqZ4SOKn2sZecQUDDXXEw?pwd=j6cf$sudo
- ROS学习笔记14:Action通信
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(14/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:action通
- ROS学习笔记15:动态参数
代码能跑就可以
学习笔记pythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(15/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:cfg文件,r
- ROS学习笔记13:导航相关消息
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(13/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:导航相关消息1
- ROS学习笔记12:机器人导航实现(理论)
代码能跑就可以
学习笔记机器人vscodepythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(12/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:SLAM,地图
- ROS学习笔记10:rosbag与rqt
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(10/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:rosbag,
- ROS学习笔记8:TF坐标变换
代码能跑就可以
学习笔记vscodepythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(8/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:静态变换,动态变
- ROS学习笔记9:TF坐标变换实操
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(9/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:乌龟跟随要求产生
- ROS学习笔记4:通信机制实操
代码能跑就可以
学习笔记pythonc++vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(4/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:运动控制,位姿订
- ROS学习笔记6:launch文件
代码能跑就可以
学习笔记pythonc++服务器vscode
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(6/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:launch文件
- ROS学习笔记2:话题通信
代码能跑就可以
学习笔记pythonc++
前言本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(2/20)。环境:Ubuntu20.04、ROS1:noetic环境配置:严格按照下方学习链接的教程配置,基本一次成功。学习链接:【Autolabor初级教程】ROS机器人入门对应链接文档:ROS机器人入门课程《ROS理论与实践》笔记绝大部分代码使用Python语言编写。本期关键词:理论模型,发布,
- ROS学习笔记11——ROS中的重名问题
Simulink_
学习笔记机器人ROS
一、ros功能包重名——ros工作空间覆盖功能包重名时,会按照ROS_PACKAGE_PATH查找,在前的会优先执行。ROS会解析.bashrc文件,并生成ROS_PACKAGE_PATHROS包路径,即调用功能包的顺序,该变量中按照.bashrc中配置设置工作空间优先级,且ROS_PACKAGE_PATH中的值,和.bashrc的配置顺序相反(后配置的优先级更高)当然,功能包出现重名时,会出现安
- Linux-ROS学习之旅-话题编程(二)
Jesus-
ROSubuntu
##承接上一篇文章的知识,有下面的实例操作通过代码新生一个海龟,放置在(5,5)点,命名为turtle2,通过代码订阅turtle2的实时位置并打印在终端,控制turtle2实现旋转运动步骤:1.创建一个工作空间和一个功能包,功能包的依赖有rospyturtlesim在功能包里面的src文件创建.py文件用于编写代码,代码如下#!/usr/bin/envpython3#-*-coding:utf-
- Linux-ROS学习之旅(一)
Jesus-
ROS学习机器人自动驾驶
##本人使用的是双系统,noetic版本,学习ROS初衷是学习控制机械臂,具体下载方法见B站,观看的教程是古月居早年的教学视频,和ROS_wiki:ROS/Tutorials-ROSWiki##下一篇文章有具体的实例,但是所用方法与本篇不尽相同1.创建工作空间$mkdir-p~//src$cd~//src$catkin_init_workspace$cd~//$catkin_make$source
- ROS学习笔记(一)——ROS Melodic的安装
橙学长学路规
ROS学习笔记学习
目录文章目录声明前言安装步骤(1)添加镜像源(2)添加密钥(3)更新软件信息(4)安装(5)初始化rosdep(注意,这里十有八九会出错!!!)第一条指令第二条指令(6)设置环境变量:(7)安装rosinstall总结参考文章授权说明声明本文为小陈同学原创,本人是刚刚开始学习ROS的小白,在安装过程中遇到了很多坑,特此总结整个安装过程与踩过的坑,希望能够对您有所帮助,转载请阅读文末的“授权说明”,
- ROS学习笔记(一) ubuntu和ros的安装
万物皆可der
ubuntulinux
##声明:这里只为大家提供一个思路,细节操作请大家可以百度或者在csdn上搜索关键字,然后寻找具体操作Ubuntu安装安装Ubuntu我弄了一周时间,所以不断踩坑不断试坑,总结出一下经验,供大家参考。1.Ubuntu安装有两种方式。第一种是利用虚拟机安装Ubuntu(这种方法比较简单如果专业做机器人方面的话,建议用第二种)。①过程文字描述:进入Windows虚拟机|WorkstationPro|V
- ROS学习笔记(一)—— 基础概览
zxxRobot
Ros
1.ros简介1.1catkin工作空间与编译系统文件列表查看工具treeshellsudoaptinstalltreetree#显示当前文件夹树状图treetree-L1#显示一级目录工作空间:存放工程开发相关文件的文件夹。源文件空间:src文件夹,放置功能包。编译空间:build文件夹,c++编译过程中产生的中间文件。基本不用关心。开发空间:devel文件夹,保存编译后生成的可执行文件。安装空
- ROS学习笔记8——实现ROS通信时的常用命令
Simulink_
学习笔记机器人linux人工智能
机器人系统中启动的节点少则几个,多则十几个、几十个,不同的节点名称各异,通信时使用话题、服务、消息、参数等等都各不相同,一个显而易见的问题是:当需要自定义节点和其他某个已经存在的节点通信时,如何获取对方的话题、以及消息载体的格式呢?ROS提供了一些实用的命令行工具,可以用于获取不同节点的各类信息。这边总结介绍了一些常用命令:rosnode:操作节点rostopic:操作话题rosservice:操
- ROS学习笔记6——ROS通信机制2(服务通信)
Simulink_
学习笔记机器人linux人工智能
服务通信也是ROS中一种极其常用的通信模式,服务通信是基于请求响应模式的,是一种应答机制。也即:一个节点A向另一个节点B发送请求,B接收处理请求并产生响应结果返回给A。用于偶然的、对时时性有要求、有一定逻辑处理需求的数据传输场景。一、服务通信理论模型图二、角色服务通信较之于话题通信更简单些,理论模型如上图所示,该模型中涉及到三个角色:ROSmaster(管理者)Server(服务端)Client(
- ROS学习笔记1——用ros输出helloworld
Simulink_
学习笔记机器人
一、创建ROS工作空间mkdir-pxxx_ws/src(必须得有src)cdxxx_wscatkin_make二、启动vscode进入工作空间,启动vscodecode.三、快捷键编译ros快捷键ctrl+shift+B调用编译,点击catkin_make:build后面的小齿轮修改.vscode/tasks.json文件{"version":"2.0.0","tasks":[{"label":
- ROS学习笔记4——ROS通信机制(话题通信)
Simulink_
学习笔记机器人人工智能
话题通信是ROS中使用频率最高的一种通信模式,话题通信是基于发布订阅模式的,也即:一个节点发布消息,另一个节点订阅该消息。一般用于不断更新的、少逻辑处理的数据传输场景。以相机信息的采集处理为例,在ROS中有一个节点需要时时的发布当前相机采集到的数据,另一个节点会订阅并解析相机数据。一、话题通信理论模型图二、角色话题通信实现模型是比较复杂的,该模型如下图所示,该模型中涉及到三个角色::ROSMast
- ROS学习笔记5——话题通信自定义msg
Simulink_
学习笔记机器人人工智能linux
在ROS通信协议中,数据载体是一个较为重要组成部分,ROS中通过std_msgs封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty....但是,这些数据一般只包含一个data字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,比如:相机的信息...std_msgs由于描述性较差而显得力不从心,这种场景下可以使用自定义的消息类型。ROS中还有
- ROS学习笔记10——自定义源文件调用
Simulink_
学习笔记机器人ROS
调用自定义源文件的时候需要配置cmakelists文件,刚学感觉还挺繁琐,用一个小案例记录一下。1、随便写个头文件在功能包的include/功能包名目录下创建一个头文件记得在.vscode下c_cpp_properties.json的includepath属性中把路径加进去#ifndef_HELLO_H#define_HELLO_Hnamespacehello_ns{classMyHello{pu
- sql统计相同项个数并按名次显示
朱辉辉33
javaoracle
现在有如下这样一个表:
A表
ID Name time
------------------------------
0001 aaa 2006-11-18
0002 ccc 2006-11-18
0003 eee 2006-11-18
0004 aaa 2006-11-18
0005 eee 2006-11-18
0004 aaa 2006-11-18
0002 ccc 20
- Android+Jquery Mobile学习系列-目录
白糖_
JQuery Mobile
最近在研究学习基于Android的移动应用开发,准备给家里人做一个应用程序用用。向公司手机移动团队咨询了下,觉得使用Android的WebView上手最快,因为WebView等于是一个内置浏览器,可以基于html页面开发,不用去学习Android自带的七七八八的控件。然后加上Jquery mobile的样式渲染和事件等,就能非常方便的做动态应用了。
从现在起,往后一段时间,我打算
- 如何给线程池命名
daysinsun
线程池
在系统运行后,在线程快照里总是看到线程池的名字为pool-xx,这样导致很不好定位,怎么给线程池一个有意义的名字呢。参照ThreadPoolExecutor类的ThreadFactory,自己实现ThreadFactory接口,重写newThread方法即可。参考代码如下:
public class Named
- IE 中"HTML Parsing Error:Unable to modify the parent container element before the
周凡杨
html解析errorreadyState
错误: IE 中"HTML Parsing Error:Unable to modify the parent container element before the child element is closed"
现象: 同事之间几个IE 测试情况下,有的报这个错,有的不报。经查询资料后,可归纳以下原因。
- java上传
g21121
java
我们在做web项目中通常会遇到上传文件的情况,用struts等框架的会直接用的自带的标签和组件,今天说的是利用servlet来完成上传。
我们这里利用到commons-fileupload组件,相关jar包可以取apache官网下载:http://commons.apache.org/
下面是servlet的代码:
//定义一个磁盘文件工厂
DiskFileItemFactory fact
- SpringMVC配置学习
510888780
springmvc
spring MVC配置详解
现在主流的Web MVC框架除了Struts这个主力 外,其次就是Spring MVC了,因此这也是作为一名程序员需要掌握的主流框架,框架选择多了,应对多变的需求和业务时,可实行的方案自然就多了。不过要想灵活运用Spring MVC来应对大多数的Web开发,就必须要掌握它的配置及原理。
一、Spring MVC环境搭建:(Spring 2.5.6 + Hi
- spring mvc-jfreeChart 柱图(1)
布衣凌宇
jfreechart
第一步:下载jfreeChart包,注意是jfreeChart文件lib目录下的,jcommon-1.0.23.jar和jfreechart-1.0.19.jar两个包即可;
第二步:配置web.xml;
web.xml代码如下
<servlet>
<servlet-name>jfreechart</servlet-nam
- 我的spring学习笔记13-容器扩展点之PropertyPlaceholderConfigurer
aijuans
Spring3
PropertyPlaceholderConfigurer是个bean工厂后置处理器的实现,也就是BeanFactoryPostProcessor接口的一个实现。关于BeanFactoryPostProcessor和BeanPostProcessor类似。我会在其他地方介绍。PropertyPlaceholderConfigurer可以将上下文(配置文件)中的属性值放在另一个单独的标准java P
- java 线程池使用 Runnable&Callable&Future
antlove
javathreadRunnablecallablefuture
1. 创建线程池
ExecutorService executorService = Executors.newCachedThreadPool();
2. 执行一次线程,调用Runnable接口实现
Future<?> future = executorService.submit(new DefaultRunnable());
System.out.prin
- XML语法元素结构的总结
百合不是茶
xml树结构
1.XML介绍1969年 gml (主要目的是要在不同的机器进行通信的数据规范)1985年 sgml standard generralized markup language1993年 html(www网)1998年 xml extensible markup language
- 改变eclipse编码格式
bijian1013
eclipse编码格式
1.改变整个工作空间的编码格式
改变整个工作空间的编码格式,这样以后新建的文件也是新设置的编码格式。
Eclipse->window->preferences->General->workspace-
- javascript中return的设计缺陷
bijian1013
JavaScriptAngularJS
代码1:
<script>
var gisService = (function(window)
{
return
{
name:function ()
{
alert(1);
}
};
})(this);
gisService.name();
&l
- 【持久化框架MyBatis3八】Spring集成MyBatis3
bit1129
Mybatis3
pom.xml配置
Maven的pom中主要包括:
MyBatis
MyBatis-Spring
Spring
MySQL-Connector-Java
Druid
applicationContext.xml配置
<?xml version="1.0" encoding="UTF-8"?>
&
- java web项目启动时自动加载自定义properties文件
bitray
javaWeb监听器相对路径
创建一个类
public class ContextInitListener implements ServletContextListener
使得该类成为一个监听器。用于监听整个容器生命周期的,主要是初始化和销毁的。
类创建后要在web.xml配置文件中增加一个简单的监听器配置,即刚才我们定义的类。
<listener>
<des
- 用nginx区分文件大小做出不同响应
ronin47
昨晚和前21v的同事聊天,说到我离职后一些技术上的更新。其中有个给某大客户(游戏下载类)的特殊需求设计,因为文件大小差距很大——估计是大版本和补丁的区别——又走的是同一个域名,而squid在响应比较大的文件时,尤其是初次下载的时候,性能比较差,所以拆成两组服务器,squid服务于较小的文件,通过pull方式从peer层获取,nginx服务于较大的文件,通过push方式由peer层分发同步。外部发布
- java-67-扑克牌的顺子.从扑克牌中随机抽5张牌,判断是不是一个顺子,即这5张牌是不是连续的.2-10为数字本身,A为1,J为11,Q为12,K为13,而大
bylijinnan
java
package com.ljn.base;
import java.util.Arrays;
import java.util.Random;
public class ContinuousPoker {
/**
* Q67 扑克牌的顺子 从扑克牌中随机抽5张牌,判断是不是一个顺子,即这5张牌是不是连续的。
* 2-10为数字本身,A为1,J为1
- 翟鸿燊老师语录
ccii
翟鸿燊
一、国学应用智慧TAT之亮剑精神A
1. 角色就是人格
就像你一回家的时候,你一进屋里面,你已经是儿子,是姑娘啦,给老爸老妈倒怀水吧,你还觉得你是老总呢?还拿派呢?就像今天一样,你们往这儿一坐,你们之间是什么,同学,是朋友。
还有下属最忌讳的就是领导向他询问情况的时候,什么我不知道,我不清楚,该你知道的你凭什么不知道
- [光速与宇宙]进行光速飞行的一些问题
comsci
问题
在人类整体进入宇宙时代,即将开展深空宇宙探索之前,我有几个猜想想告诉大家
仅仅是猜想。。。未经官方证实
1:要在宇宙中进行光速飞行,必须首先获得宇宙中的航行通行证,而这个航行通行证并不是我们平常认为的那种带钢印的证书,是什么呢? 下面我来告诉
- oracle undo解析
cwqcwqmax9
oracle
oracle undo解析2012-09-24 09:02:01 我来说两句 作者:虫师收藏 我要投稿
Undo是干嘛用的? &nb
- java中各种集合的详细介绍
dashuaifu
java集合
一,java中各种集合的关系图 Collection 接口的接口 对象的集合 ├ List 子接口 &n
- 卸载windows服务的方法
dcj3sjt126com
windowsservice
卸载Windows服务的方法
在Windows中,有一类程序称为服务,在操作系统内核加载完成后就开始加载。这里程序往往运行在操作系统的底层,因此资源占用比较大、执行效率比较高,比较有代表性的就是杀毒软件。但是一旦因为特殊原因不能正确卸载这些程序了,其加载在Windows内的服务就不容易删除了。即便是删除注册表中的相 应项目,虽然不启动了,但是系统中仍然存在此项服务,只是没有加载而已。如果安装其他
- Warning: The Copy Bundle Resources build phase contains this target's Info.plist
dcj3sjt126com
iosxcode
http://developer.apple.com/iphone/library/qa/qa2009/qa1649.html
Excerpt:
You are getting this warning because you probably added your Info.plist file to your Copy Bundle
- 2014之C++学习笔记(一)
Etwo
C++EtwoEtwoiterator迭代器
已经有很长一段时间没有写博客了,可能大家已经淡忘了Etwo这个人的存在,这一年多以来,本人从事了AS的相关开发工作,但最近一段时间,AS在天朝的没落,相信有很多码农也都清楚,现在的页游基本上达到饱和,手机上的游戏基本被unity3D与cocos占据,AS基本没有容身之处。so。。。最近我并不打算直接转型
- js跨越获取数据问题记录
haifengwuch
jsonpjsonAjax
js的跨越问题,普通的ajax无法获取服务器返回的值。
第一种解决方案,通过getson,后台配合方式,实现。
Java后台代码:
protected void doPost(HttpServletRequest req, HttpServletResponse resp)
throws ServletException, IOException {
String ca
- 蓝色jQuery导航条
ini
JavaScripthtmljqueryWebhtml5
效果体验:http://keleyi.com/keleyi/phtml/jqtexiao/39.htmHTML文件代码:
<!DOCTYPE html>
<html xmlns="http://www.w3.org/1999/xhtml">
<head>
<title>jQuery鼠标悬停上下滑动导航条 - 柯乐义<
- linux部署jdk,tomcat,mysql
kerryg
jdktomcatlinuxmysql
1、安装java环境jdk:
一般系统都会默认自带的JDK,但是不太好用,都会卸载了,然后重新安装。
1.1)、卸载:
(rpm -qa :查询已经安装哪些软件包;
rmp -q 软件包:查询指定包是否已
- DOMContentLoaded VS onload VS onreadystatechange
mutongwu
jqueryjs
1. DOMContentLoaded 在页面html、script、style加载完毕即可触发,无需等待所有资源(image/iframe)加载完毕。(IE9+)
2. onload是最早支持的事件,要求所有资源加载完毕触发。
3. onreadystatechange 开始在IE引入,后来其它浏览器也有一定的实现。涉及以下 document , applet, embed, fra
- sql批量插入数据
qifeifei
批量插入
hi,
自己在做工程的时候,遇到批量插入数据的数据修复场景。我的思路是在插入前准备一个临时表,临时表的整理就看当时的选择条件了,临时表就是要插入的数据集,最后再批量插入到数据库中。
WITH tempT AS (
SELECT
item_id AS combo_id,
item_id,
now() AS create_date
FROM
a
- log4j打印日志文件 如何实现相对路径到 项目工程下
thinkfreer
Weblog4j应用服务器日志
最近为了实现统计一个网站的访问量,记录用户的登录信息,以方便站长实时了解自己网站的访问情况,选择了Apache 的log4j,但是在选择相对路径那块 卡主了,X度了好多方法(其实大多都是一样的内用,还一个字都不差的),都没有能解决问题,无奈搞了2天终于解决了,与大家分享一下
需求:
用户登录该网站时,把用户的登录名,ip,时间。统计到一个txt文档里,以方便其他系统调用此txt。项目名
- linux下mysql-5.6.23.tar.gz安装与配置
笑我痴狂
mysqllinuxunix
1.卸载系统默认的mysql
[root@localhost ~]# rpm -qa | grep mysql
mysql-libs-5.1.66-2.el6_3.x86_64
mysql-devel-5.1.66-2.el6_3.x86_64
mysql-5.1.66-2.el6_3.x86_64
[root@localhost ~]# rpm -e mysql-libs-5.1
 在菜单栏点击edit—building edit,就能修墙了
在菜单栏点击edit—building edit,就能修墙了 这里我们先单击左边菜单栏的Create Walls下边的wall图标进行修墙,这里详细怎么操作呢,我给大家放个大佬的链接,我就不班门弄斧了https://blog.csdn.net/wilylcyu/article/details/51754495
这里我们先单击左边菜单栏的Create Walls下边的wall图标进行修墙,这里详细怎么操作呢,我给大家放个大佬的链接,我就不班门弄斧了https://blog.csdn.net/wilylcyu/article/details/51754495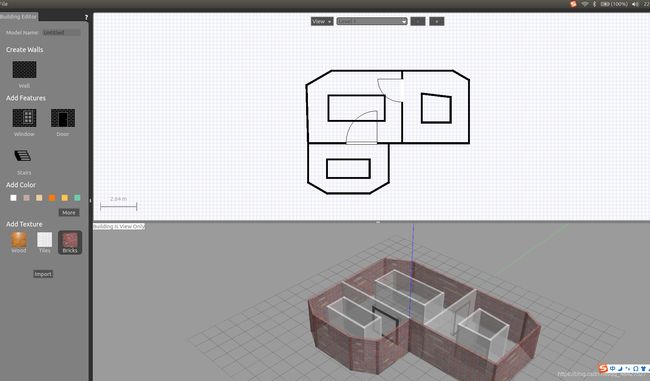 我就随手画了由墙围起来的房间,并贴上了纹理,点击上方菜单栏File—save as
我就随手画了由墙围起来的房间,并贴上了纹理,点击上方菜单栏File—save as 选好路径并且保存,再退出,退出后,我们发现,墙的模型还在,也可以在Insert下边找到自己墙的模型,并且可以直接将模型拖进gazebo中,如图中所示。也就是说以后只要打开gazebo,就可以直接将墙的模型拖进gazebo了,这里我们先不拖动,保持原先就有的墙体模型。
选好路径并且保存,再退出,退出后,我们发现,墙的模型还在,也可以在Insert下边找到自己墙的模型,并且可以直接将模型拖进gazebo中,如图中所示。也就是说以后只要打开gazebo,就可以直接将墙的模型拖进gazebo了,这里我们先不拖动,保持原先就有的墙体模型。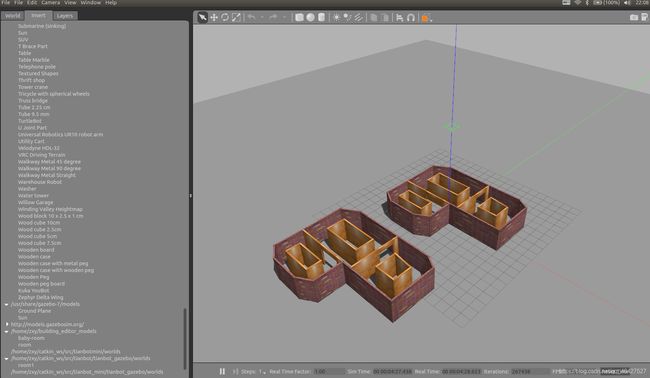 我们可以放一些摆设或者障碍物进去,可以直接在Insert里面拖动装载的模型,一会儿我会放模型库的链接。
我们可以放一些摆设或者障碍物进去,可以直接在Insert里面拖动装载的模型,一会儿我会放模型库的链接。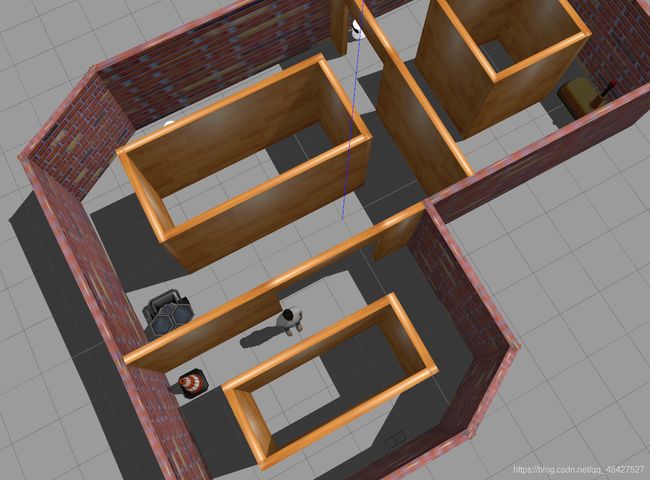 点击File—save world as选择路径保存到 catkin_ws/src/tianbot/tianbot_gazebo/world文件夹下面,命名为baby_room.world
点击File—save world as选择路径保存到 catkin_ws/src/tianbot/tianbot_gazebo/world文件夹下面,命名为baby_room.world