LQR控制算法的浅析
目录
前言
一、知识点补充
1、拉格朗日乘子法
2、积分中值定理
3、向前欧拉法,向后欧拉法,中点欧拉法
4、向量的导数
5、矩阵求逆引理(记住就好,推导见链接)
二、连续时间下的LQR推导
1、系统状态方程
2、推导过程
3、例子-------手平衡小杆
3.1、系统模型
3.2、simulink模型仿真
3.2.1、开环情况(k1=k2=0,初值设置为5)
3.2.2、闭环情况
仿真结果:
三、离散时间下的LQR推导(重要)
1、状态方程离散化
2、离散LQR的解法
总结
前言
这里的部分内容和之前的转载文章有相同的地方LQR控制算法及matlab/simulink仿真_陌路两立的博客-CSDN博客_lqr matlab,写这篇文章的目的是为了增强自己对LQR控制算法的理解。
一、知识点补充
1、拉格朗日乘子法
假设需要求极值的目标函数为 ,约束条件为
,约束条件为![]() 。设
。设![]() ,定义一个新函数
,定义一个新函数![]() ,则用偏导数方法列出方程:
,则用偏导数方法列出方程:
2、积分中值定理
若函数在闭区间![[a,b]](http://img.e-com-net.com/image/info8/5812e53fc44f40caad817e6406ffb73e.gif) 上连续,则在积分区间上至少存在一个点
上连续,则在积分区间上至少存在一个点 ,使得下式成立:
,使得下式成立:
![]()
其中,![]() ,满足:
,满足:![]() 。
。
3、向前欧拉法,向后欧拉法,中点欧拉法
向前欧拉法:![]() ;
;
向后欧拉法:![]() ;
;
中点欧拉法:![]() 。
。
4、向量的导数

参考: 向量的导数_影子飞扬的博客-CSDN博客_向量的导数
5、矩阵求逆引理(记住就好,推导见链接)
![]()
参考:矩阵求逆引理(matrix inversion lemma)_UESTC_C2_403的博客-CSDN博客_矩阵求逆引理
二、连续时间下的LQR推导
1、系统状态方程
开环:![]() ;
;
闭环:![]() ,设计
,设计 ,可以得到
,可以得到![]() ,通过改变
,通过改变 可以改变
可以改变![]() 的特征值从而控制系统表现。
的特征值从而控制系统表现。
2、推导过程
系统的状态发生变化的原因是在上一个状态时,有外界干扰或者系统的输入发生变化引起的,忽略外界干扰的影响,这里引入cost function(能量函数,损失函数):
![]()
其中,Q和R均为自己设计的半正定矩阵。我们的目的就是通过设计Q和R使得能量函数最小。
能量函数的理解:
Q= ,能量函数前面部分可以写成
,能量函数前面部分可以写成![]() ,当
,当![]() 时,Q表现为惩罚;R越大,u对J的影响越大,希望J越小,可以使得u减小。
时,Q表现为惩罚;R越大,u对J的影响越大,希望J越小,可以使得u减小。
假设Q= ,当
,当![]() 时,J将会变得非常大,
时,J将会变得非常大,![]() 对J有较大的影响,为了使得J减小,只能希望
对J有较大的影响,为了使得J减小,只能希望![]() 快速收敛。
快速收敛。
将控制器![]() 代入到能量函数中:
代入到能量函数中:
![]()
为了找到,假设存在一个常量矩阵 ,使得
,使得
![]()
随后得到:

将![]() 代入到上式中得:
代入到上式中得:

为了使上式恒成立,我们可以得到:
![]()
通过令 ![]() ,上式可以化简为:
,上式可以化简为:
![]()
该式就是著名的Riccati方程。其中  是系统矩阵已知,选取合适的
是系统矩阵已知,选取合适的 ![]() ,可以解出 ,从而得到,控制器
,可以解出 ,从而得到,控制器![]() 。
。
注:k的由来
![]()
![]()
3、例子-------手平衡小杆
3.1、系统模型
下面是B站大佬DR_CAN对LQR控制算法的讲解(知识的搬运工)。
运动学方程:
其中: 表示杆子的长度,
表示杆子的长度, 表示重力加速度,
表示重力加速度, 表示杆子与垂直方向的夹角,
表示杆子与垂直方向的夹角, 表示手的移动。
表示手的移动。
通过令 ![]() 可以得到:
可以得到:
令 ![]() 得:
得:
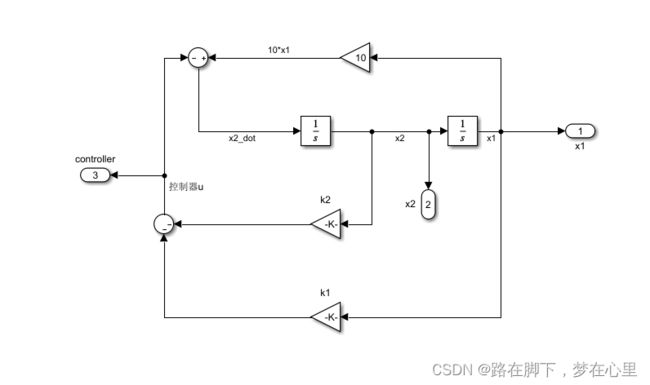
3.2、simulink模型仿真
3.2.1、开环情况(k1=k2=0,初值设置为5)
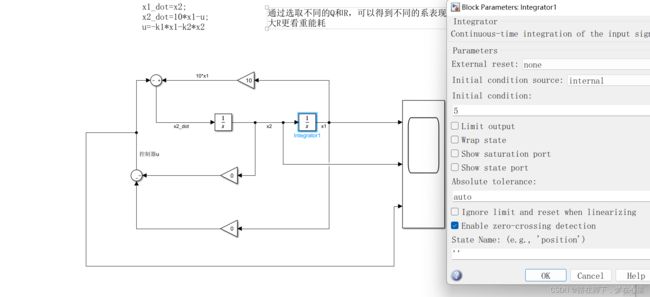
3.2.2、闭环情况
LQR求k代码:
%% 系统参数
A=[0 1;10 0];
B=[0;-1];
%% 大Q情况
Q=[100 0;0 1];
R=.01;
K=lqr(A,B,Q,R);
%% 大R情况
% Q=[1 0;0 1];
% R=100;
% K=lqr(A,B,Q,R);
%% 求解出来
k1=K(1,1);
k2=K(1,2);
simulink模型:
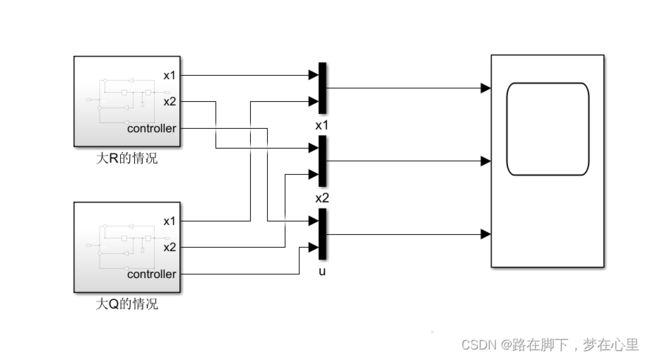
大R情况:k1=-20.000499987499590,k2=-6.325424884938331;
大Q情况:k1=-1.104987562112088e+02,k2=-17.916403445513760;
仿真结果:

结论:通过选取不同的Q和R可以得到不同的系统表现,其中大Q决定的是系统的状态能否快速达到收敛效果,大R决定的是系统的能耗(输入)。
参考: 1、视频链接:https://www.bilibili.com/video/BV1RW411q7FDshare_source=copy_web
2、LQR控制算法及matlab/simulink仿真_陌路两立的博客-CSDN博客_lqr matlab
三、离散时间下的LQR推导(重要)
1、状态方程离散化
离散之后最重要的一个就是不可以使用微分方程描述系统了。
动力学方程:![]() ,对动力学方程两边同时求积分得:
,对动力学方程两边同时求积分得:
其中![]() ,这里我们需要知道是
,这里我们需要知道是 是
是 ![]() 维的,
维的, 称为采样周期。
称为采样周期。
使用到的知识点:状态  去
去  使用的是中间欧拉法,控制输入
使用的是中间欧拉法,控制输入  去 使用的是向前欧拉法(因为我们无法知道
去 使用的是向前欧拉法(因为我们无法知道![]() )。
)。
2、离散LQR的解法
step 1:和连续时间下的LQR相同,首先引入能量函数(cost function):

step 2:引入约束函数:
注:为什么cost function只有![]() ,却没有
,却没有![]() 呢?
呢?
答:如果![]() 改为
改为 的话,可是约束函数只能覆盖
的话,可是约束函数只能覆盖![]() ,所以cost function只能为
,所以cost function只能为 。
。
step 3:拉格朗日乘子法求解cost function:
首先将约束函数写为:
然后构造新函数:
其中 ![]() 。
。
注:注意这里的维度问题,![]() 是
是![]() 维的。
维的。
接下来对构造的函数求偏导:
首先对 求偏导:
![]()
![]()
综上所述:
然后对 求导:
![]()
![]()
![]()
最后对 求导:
求导:


综上所述:
其中, 。
。
step 4:递推式
当 时:
时:
![]()
![]()
通过对比![]() 和
和![]() 可以推出:
可以推出:
![]()
其中![]() (Riccati方程)。
(Riccati方程)。
可以得到:

其中  认为已知。
认为已知。
LQR控制实际为:
首先,取矩阵 初值为![]() ,然后,代入离散时间下的Riccati方程
,然后,代入离散时间下的Riccati方程![]() 中迭代,求出矩阵 (一般只需要迭代几十次, 就会收敛),最后,将 代入到 中得到 。
中迭代,求出矩阵 (一般只需要迭代几十次, 就会收敛),最后,将 代入到 中得到 。
总结
这里是我自己学LQR控制算法的推导过程,数学原理很大,总结起来就是,通过选取Q和R,然后将A,B,Q,R代入LQR控制算法中(A,B是系统的状态矩阵,认为是已知的),从而得到K,然后将K代入到反馈控制输入 中,从而得到控制输入,其中Q决定的是收敛速度,R决定的是能耗。因此,我们需要通过选择合适的Q和R使得cost function达到最优。欢迎大家来讨论指正(我的QQ1012154405),一起在控制的海洋中前进!!!
中,从而得到控制输入,其中Q决定的是收敛速度,R决定的是能耗。因此,我们需要通过选择合适的Q和R使得cost function达到最优。欢迎大家来讨论指正(我的QQ1012154405),一起在控制的海洋中前进!!!