LeGO-LOAM中的数学公式推导
LeGO-LOAM是一种在LOAM之上进行改进的激光雷达建图方法,建图效果比LOAM要好,但是建图较为稀疏,计算量也更小了。
本文原地址:wykxwyc的博客
github注释后LeGO-LOAM源码:LeGO-LOAM_NOTED
关于代码的详细理解,建议阅读:1.地图优化代码理解
2.图像重投影代码理解
3.特征关联代码理解
4.LeGO-LOAM中的数学公式推导
以上博客会随时更新,如果对你有帮助,请点击注释代码的github仓库右上角star按钮,你的鼓励将给我更多动力。
本文 记录重新读LeGO-LOAM的代码时看到的数学运算,记录这些数学运算背后的原理,会随时更新。
文章目录
-
-
- featureAssociation中的数学公式
- mapOptmization中的数学公式
-
-
- cornerOptimization中的协方差矩阵计算
- cornerOptimization中特征边缘的方向向量的计算
- cornerOptimization中计算点到直线的距离
- surfOptimization中如何计算点到平面的距离
- pointAssociateToMap中对坐标变换的数学表达
- 已知roll,pitch,yaw三个角如何求得旋转矩阵?
- LMOptimization中如何进行优化迭代计算
-
- transformFusion中的数学公式
- 参考文献及链接
-
featureAssociation中的数学公式
To be continued.
mapOptmization中的数学公式
cornerOptimization中的协方差矩阵计算
随机变量的协方差是什么?
1.在概率论和统计中,协方差是对两个随机变量联合分布线性相关程度的一种度量。两个随机变量越线性相关,协方差越大,完全线性无关,协方差为零。(线性无关并不代表完全无关,更不代表相互独立。)
2.两个随机变量 X X X与 Y Y Y协方差的定义如下:
(CO-1) cov ( X , Y ) = E [ ( X − E [ X ] ) ( Y − E [ Y ] ) ] \operatorname{cov}(X, Y)=\mathrm{E}[(X-\mathrm{E}[X])(Y-\mathrm{E}[Y])] \tag{CO-1} cov(X,Y)=E[(X−E[X])(Y−E[Y])](CO-1)
如何判断两个随机变量的相关程度?
1.通过定义这两个变量之间的相关系数 η \eta η进行判断:
(CO-2) η = cov ( X , Y ) var ( X ) ⋅ var ( Y ) \eta=\frac{\operatorname{cov}(X, Y)}{\sqrt{\operatorname{var}(X) \cdot \operatorname{var}(Y)}} \tag{CO-2} η=var(X)⋅var(Y)cov(X,Y)(CO-2)
1表示完全线性相关,−1表示完全线性负相关,0表示线性无关。线性无关并不代表完全无关,更不代表相互独立。
样本的协方差矩阵
1.设多维随机变量 X = [ X 1 , X 2 , X 3 , … , X n ] T \mathbf{X}=\left[X_{1}, X_{2}, X_{3}, \dots, X_{n}\right]^{T} X=[X1,X2,X3,…,Xn]T的协方差矩阵为 Σ \Sigma Σ,则协方差矩阵中的每个元素为:
(CO-3) Σ i j = cov ( X i , X j ) = E [ ( X i − E [ X i ] ) ( X j − E [ X j ] ) ] \Sigma_{i j}=\operatorname{cov}\left(X_{i}, X_{j}\right)=\mathrm{E}\left[\left(X_{i}-\mathrm{E}\left[X_{i}\right]\right)\left(X_{j}-\mathrm{E}\left[X_{j}\right]\right)\right] \tag{CO-3} Σij=cov(Xi,Xj)=E[(Xi−E[Xi])(Xj−E[Xj])](CO-3)
上式表示的是 X i X_{i} Xi和 X j X_{j} Xj之间的协方差。
公式CO-3也揭示了协方差矩阵中每个元素的计算过程,整个矩阵为:
Σ = E [ ( X − E [ X ] ) ( X − E [ X ] ) T ] = [ cov ( X 1 , X 1 ) cov ( X 1 , X 2 ) … cov ( X 1 , X n ) cov ( X 2 , X 1 ) cov ( X 2 , X 2 ) … cov ( X 2 , X n ) ⋮ ⋮ ⋱ ⋮ cov ( X n , X 1 ) cov ( X n , X 2 ) ⋯ cov ( X n , X n ) ] = [ E [ ( X 1 − E [ X 1 ] ) ( X 1 − E [ X 1 ] ) ] E [ ( X 1 − E [ X 1 ] ) ( X 2 − E [ X 2 ] ) ] ⋯ E [ ( X 1 − E [ X 1 ] ) ( X n − E [ X n ] ) ] E [ ( X 2 − E [ X 2 ] ) ( X 1 − E [ X 1 ] ) ] E [ ( X 2 − E [ X 2 ] ) ( X 2 − E [ X 2 ] ) ] ⋯ E [ ( X 2 − E [ X 2 ] ) ( X n − E [ X n ] ) ] ⋮ ⋮ ⋱ ⋮ E [ ( X n − E [ X n ] ) ( X 1 − E [ X 1 ] ) ] E [ ( X n − E [ X n ] ) ( X 2 − E [ X 2 ] ) ] ⋯ E [ ( X n − E [ X n ] ) ( X n − E [ X n ] ) ] ] \begin{aligned} &\Sigma =\mathrm{E}\left[(\mathbf{X}-\mathrm{E}[\mathbf{X}])(\mathbf{X}-\mathrm{E}[\mathbf{X}])^{T}\right] \\ &=\left[\begin{array}{cccc}{\operatorname{cov}\left(X_{1}, X_{1}\right)} & {\operatorname{cov}\left(X_{1}, X_{2}\right)} & {\dots} & {\operatorname{cov}\left(X_{1}, X_{n}\right)} \\ {\operatorname{cov}\left(X_{2}, X_{1}\right)} & {\operatorname{cov}\left(X_{2}, X_{2}\right)} & {\dots} & {\operatorname{cov}\left(X_{2}, X_{n}\right)} \\ {\vdots} & {\vdots} & {\ddots} & {\vdots} \\ {\operatorname{cov}\left(X_{n}, X_{1}\right)} & {\operatorname{cov}\left(X_{n}, X_{2}\right)} & {\cdots} & {\operatorname{cov}\left(X_{n}, X_{n}\right)}\end{array}\right] \\ &=\left[\begin{array}{cccc}{\mathrm{E}\left[\left(X_{1}-\mathrm{E}\left[X_{1}\right]\right)\left(X_{1}-\mathrm{E}\left[X_{1}\right]\right)\right]} & {\mathrm{E}\left[\left(X_{1}-\mathrm{E}\left[X_{1}\right]\right)\left(X_{2}-\mathrm{E}\left[X_{2}\right]\right)\right]} & {\cdots} & {\mathrm{E}\left[\left(X_{1}-\mathrm{E}\left[X_{1}\right]\right)\left(X_{n}-\mathrm{E}\left[X_{n}\right]\right)\right]} \\ {\mathrm{E}\left[\left(X_{2}-\mathrm{E}\left[X_{2}\right]\right)\left(X_{1}-\mathrm{E}\left[X_{1}\right]\right)\right]} & {\mathrm{E}\left[\left(X_{2}-\mathrm{E}\left[X_{2}\right]\right)\left(X_{2}-\mathrm{E}\left[X_{2}\right]\right)\right]} & {\cdots} & {\mathrm{E}\left[\left(X_{2}-\mathrm{E}\left[X_{2}\right]\right)\left(X_{n}-\mathrm{E}\left[X_{n}\right]\right)\right]} \\ {\vdots} & {\vdots} & {\ddots} & {\vdots} \\ {\mathrm{E}\left[\left(X_{n}-\mathrm{E}\left[X_{n}\right]\right)\left(X_{1}-\mathrm{E}\left[X_{1}\right]\right)\right]} & {\mathrm{E}\left[\left(X_{n}-\mathrm{E}\left[X_{n}\right]\right)\left(X_{2}-\mathrm{E}\left[X_{2}\right]\right)\right]} & {\cdots} & {\mathrm{E}\left[\left(X_{n}-\mathrm{E}\left[X_{n}\right]\right)\left(X_{n}-\mathrm{E}\left[X_{n}\right]\right)\right]}\end{array}\right] \end{aligned} Σ=E[(X−E[X])(X−E[X])T]=⎣⎢⎢⎢⎡cov(X1,X1)cov(X2,X1)⋮cov(Xn,X1)cov(X1,X2)cov(X2,X2)⋮cov(Xn,X2)……⋱⋯cov(X1,Xn)cov(X2,Xn)⋮cov(Xn,Xn)⎦⎥⎥⎥⎤=⎣⎢⎢⎢⎡E[(X1−E[X1])(X1−E[X1])]E[(X2−E[X2])(X1−E[X1])]⋮E[(Xn−E[Xn])(X1−E[X1])]E[(X1−E[X1])(X2−E[X2])]E[(X2−E[X2])(X2−E[X2])]⋮E[(Xn−E[Xn])(X2−E[X2])]⋯⋯⋱⋯E[(X1−E[X1])(Xn−E[Xn])]E[(X2−E[X2])(Xn−E[Xn])]⋮E[(Xn−E[Xn])(Xn−E[Xn])]⎦⎥⎥⎥⎤
记上面公式为(CO-4)。
2.样本的协方差矩阵的计算
样本集合为 { x ⋅ j = [ x 1 j , x 2 j , … , x n j ] T ∣ 1 ⩽ j ⩽ m } \left\{\mathbf{x}_{\cdot j}=\left[x_{1 j}, x_{2 j}, \ldots, x_{n j}\right]^{T} | 1 \leqslant j \leqslant m\right\} {x⋅j=[x1j,x2j,…,xnj]T∣1⩽j⩽m},m表示样本数量。
整个样本的协方差矩阵:
Σ ^ = [ q 11 q 12 ⋯ q 1 n q 21 q 21 ⋯ q 2 n ⋮ ⋮ ⋱ ⋮ q n 1 q n 2 ⋯ q n n ] = 1 m − 1 [ ∑ j = 1 m ( x 1 j − x ‾ 1 ) ( x 1 j − x ‾ 1 ) ∑ j = 1 m ( x 1 j − x ‾ 1 ) ( x 2 j − x ‾ 2 ) ⋯ ∑ j = 1 m ( x 1 j − x ‾ 1 ) ( x n j − x ‾ n ) ∑ j = 1 m ( x 2 j − x ‾ 2 ) ( x 1 j − x ‾ 1 ) ∑ j = 1 m ( x 2 j − x ‾ 2 ) ( x 2 j − x ‾ 2 ) ⋯ ∑ j = 1 m ( x 2 j − x ‾ 2 ) ( x n j − x ‾ n ) ⋮ ⋮ ⋱ ⋮ ∑ j = 1 m ( x n j − x ‾ n ) ( x 1 j − x ‾ 1 ) ∑ j = 1 m ( x n j − x ‾ n ) ( x 2 j − x ‾ 2 ) ⋯ ∑ j = 1 m ( x n j − x ‾ n ) ( x n j − x ‾ n ) ] = 1 m − 1 ∑ j = 1 m ( x . j − x ‾ ) ( x : j − x ‾ ) T \begin{aligned} &\hat{\Sigma} =\left[\begin{array}{cccc}{q_{11}} & {q_{12}} & {\cdots} & {q_{1 n}} \\ {q_{21}} & {q_{21}} & {\cdots} & {q_{2 n}} \\ {\vdots} & {\vdots} & {\ddots} & {\vdots} \\ {q_{n 1}} & {q_{n 2}} & {\cdots} & {q_{n n}}\end{array}\right] \\ &=\frac{1}{m-1}\left[\begin{array}{cccc}{\sum_{j=1}^{m}\left(x_{1 j}-\overline{x}_{1}\right)\left(x_{1 j}-\overline{x}_{1}\right)} & {\sum_{j=1}^{m}\left(x_{1 j}-\overline{x}_{1}\right)\left(x_{2 j}-\overline{x}_{2}\right)} & {\cdots} & {\sum_{j=1}^{m}\left(x_{1 j}-\overline{x}_{1}\right)\left(x_{n j}-\overline{x}_{n}\right)} \\ {\sum_{j=1}^{m}\left(x_{2 j}-\overline{x}_{2}\right)\left(x_{1 j}-\overline{x}_{1}\right)} & {\sum_{j=1}^{m}\left(x_{2 j}-\overline{x}_{2}\right)\left(x_{2 j}-\overline{x}_{2}\right)} & {\cdots} & {\sum_{j=1}^{m}\left(x_{2 j}-\overline{x}_{2}\right)\left(x_{n j}-\overline{x}_{n}\right)} \\ {\vdots} & {\vdots} & {\ddots} & {\vdots} \\ {\sum_{j=1}^{m}\left(x_{n j}-\overline{x}_{n}\right)\left(x_{1 j}-\overline{x}_{1}\right)} & {\sum_{j=1}^{m}\left(x_{n j}-\overline{x}_{n}\right)\left(x_{2 j}-\overline{x}_{2}\right)} & {\cdots} & {\sum_{j=1}^{m}\left(x_{n j}-\overline{x}_{n}\right)\left(x_{n j}-\overline{x}_{n}\right)}\end{array}\right] \\ &=\frac{1}{m-1} \sum_{j=1}^{m}\left(\mathbf{x} ._{j}-\overline{\mathbf{x}}\right)\left(\mathbf{x}_{ : j}-\overline{\mathbf{x}}\right)^{T} \end{aligned} Σ^=⎣⎢⎢⎢⎡q11q21⋮qn1q12q21⋮qn2⋯⋯⋱⋯q1nq2n⋮qnn⎦⎥⎥⎥⎤=m−11⎣⎢⎢⎢⎡∑j=1m(x1j−x1)(x1j−x1)∑j=1m(x2j−x2)(x1j−x1)⋮∑j=1m(xnj−xn)(x1j−x1)∑j=1m(x1j−x1)(x2j−x2)∑j=1m(x2j−x2)(x2j−x2)⋮∑j=1m(xnj−xn)(x2j−x2)⋯⋯⋱⋯∑j=1m(x1j−x1)(xnj−xn)∑j=1m(x2j−x2)(xnj−xn)⋮∑j=1m(xnj−xn)(xnj−xn)⎦⎥⎥⎥⎤=m−11j=1∑m(x.j−x)(x:j−x)T
记上面公式为CO-5。
LeGO-LOAM的代码中的协方差计算过程
1.LeGO-LOAM中的协方差采用公式OC-5中的计算方法,每个点云的维度为n=3,XYZ三个距离,一共有m=5个样本;
2.有一个区别就是代码中最后直接除以m=5,而公式OC-5中是除以m-1=4。
cornerOptimization中特征边缘的方向向量的计算
求方向向量的过程?
1.对识别为特征边缘的点计算它和它周围点的协方差矩阵,
2.然后用opencv库函数求解特征值和特征向量
3.会有一个大的特征值和两个小的特征值,大的特征值对应于方向向量。
为什么这个协方差矩阵的较大特征值对应的就是边缘的方向?
To be continued.
cornerOptimization中计算点到直线的距离
点指的是被认为是特征边缘上的点,直线就是特征边缘所在的这条直线。
简单来看就是计算点到直线的距离,用面积法进行计算。
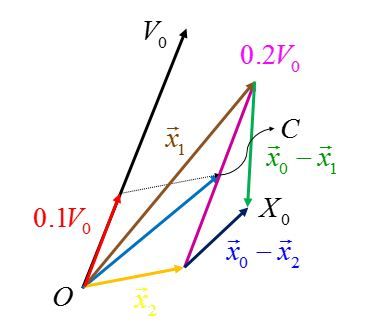
在上图中,就是求点 X 0 X_{0} X0到紫色直线 0.2 V 0 0.2V_{0} 0.2V0的距离。
点 X 0 X_{0} X0对应于点pointSel,点 C C C对应于点 [ c x , c y , c z ] [c_{x},c_{y},c_{z}] [cx,cy,cz],先求绿色,蓝色线段构成的平行四边形面积,然后除以紫色的长度,得到距离值。
surfOptimization中如何计算点到平面的距离
To be continued
pointAssociateToMap中对坐标变换的数学表达
这个函数中通过乘以旋转矩阵的方式,对坐标进行了变换,由局部坐标系变换到地图的全局坐标系。
变换是先进行yaw角的变换,然后是roll角的变换,最后是pitch的变换(即z->x->y),按照坐标变换左乘矩阵的规则,有:
(PA-1) p ⃗ o = R y R x R z p ⃗ i + T \vec{p}_{o}=\mathbf{R}_{y}\mathbf{R}_{x}\mathbf{R}_{z} \vec{p}_{i}+\mathbf{T} \tag{PA-1} po=RyRxRzpi+T(PA-1)
所以整体的旋转变换可以写成一个矩阵形式:
(PA-2) R t o t a l = R y R x R z = Y 1 X 2 Z 3 = [ c 1 c 3 + s 1 s 2 s 3 c 3 s 1 s 2 − c 1 s 3 c 2 s 1 c 2 s 3 c 2 c 3 − s 2 c 1 s 2 s 3 − c 3 s 1 c 1 c 3 s 2 + s 1 s 3 c 1 c 2 ] \mathbf{R}_{total}=\mathbf{R}_{y}\mathbf{R}_{x}\mathbf{R}_{z} \\ =Y_{1} X_{2} Z_{3}=\left[\begin{array}{ccc}{c_{1} c_{3}+s_{1} s_{2} s_{3}} & {c_{3} s_{1} s_{2}-c_{1} s_{3}} & {c_{2} s_{1}} \\ {c_{2} s_{3}} & {c_{2} c_{3}} & {-s_{2}} \\ {c_{1} s_{2} s_{3}-c_{3} s_{1}} & {c_{1} c_{3} s_{2}+s_{1} s_{3}} & {c_{1} c_{2}}\end{array}\right] \tag{PA-2} Rtotal=RyRxRz=Y1X2Z3=⎣⎡c1c3+s1s2s3c2s3c1s2s3−c3s1c3s1s2−c1s3c2c3c1c3s2+s1s3c2s1−s2c1c2⎦⎤(PA-2)
注意:上面公式简写了 s i n , c o s sin,cos sin,cos函数的符号。
已知roll,pitch,yaw三个角如何求得旋转矩阵?
旋转有两种,一种是向量旋转,另一张是坐标系旋转。如下图所示:

向量旋转
图R-1是向量旋转,通过平面几何公式,很容易就能得到旋转后的向量坐标是:
(RO-1) v ′ = R θ v 0 = [ cos θ − sin θ sin θ cos θ ] × v 0 \mathbf{v}^{\prime}=\mathbf{R}_{\theta} \mathbf{v}_{0}= \left[\begin{array}{cc}{\cos \theta} & {-\sin \theta} \\ {\sin \theta} & {\cos \theta}\end{array}\right]\times \mathbf{v}_{0} \tag{RO-1} v′=Rθv0=[cosθsinθ−sinθcosθ]×v0(RO-1)
其中有:
(RO-2) R θ = [ cos θ − sin θ sin θ cos θ ] \mathrm{R}_{\theta}=\left[\begin{array}{cc}{\cos \theta} & {-\sin \theta} \\ {\sin \theta} & {\cos \theta}\end{array}\right] \tag{RO-2} Rθ=[cosθsinθ−sinθcosθ](RO-2)
坐标系旋转
坐标系旋转就是相当于向量的逆旋转,所以有:
(RO-3) R θ ′ = [ cos θ sin θ − sin θ cos θ ] \mathrm{R}_{\theta}^{\prime}=\left[\begin{array}{cc}{\cos \theta} & {\sin \theta} \\ {-\sin \theta} & {\cos \theta}\end{array}\right] \tag{RO-3} Rθ′=[cosθ−sinθsinθcosθ](RO-3)
三维空间中的坐标旋转
公式RO-2可以看做是绕z轴正向旋转 θ \theta θ的角度,只有 x , y x,y x,y坐标变化, z z z坐标不变,对应于yaw角的旋转,按照这种方式我们可以分别得到绕roll,pitch和yaw角的旋转公式:
(RO-4) R x ( α ) = [ 1 0 0 0 cos α sin α 0 − sin α cos α ] R y ( β ) = [ cos β 0 − sin β 0 1 0 sin β 0 cos β ] R z ( γ ) = [ cos γ sin γ 0 − sin γ cos γ 0 0 0 1 ] \begin{array}{l}{\mathrm{R}_{x}(\alpha)=\left[\begin{array}{ccc}{1} & {0} & {0} \\ {0} & {\cos \alpha} & {\sin \alpha} \\ {0} & {-\sin \alpha} & {\cos \alpha}\end{array}\right]} \\ {\mathrm{R}_{y}(\beta)=\left[\begin{array}{ccc}{\cos \beta} & {0} & {-\sin \beta} \\ {0} & {1} & {0} \\ {\sin \beta} & {0} & {\cos \beta}\end{array}\right]} \\ {\mathrm{R}_{z}(\gamma)=\left[\begin{array}{ccc}{\cos \gamma} & {\sin \gamma} & {0} \\ {-\sin \gamma} & {\cos \gamma} & {0} \\ {0} & {0} & {1}\end{array}\right]}\end{array} \tag{RO-4} Rx(α)=⎣⎡1000cosα−sinα0sinαcosα⎦⎤Ry(β)=⎣⎡cosβ0sinβ010−sinβ0cosβ⎦⎤Rz(γ)=⎣⎡cosγ−sinγ0sinγcosγ0001⎦⎤(RO-4)
注意上式中的绕y轴的pitch旋转和另外两个有点不同。
LeGO中的坐标旋转问题
LeGO中的局部坐标系下的点转换到全局坐标系中去的过程在pointAssociateToMap中对坐标变换的数学表达中以及说明,根据公式PA-2,我们可以得到pointAssociateToMap对点进行的坐标变换:
旋转(记为公式RO-5):
R = [ c o s e x c o s e z + s i n e x s i n e y s i n e z c o s e z s i n e x s i n e y − c o s e x s i n e z c o s e y s i n e x c o s e y s i n e z c o s e y c o s e z − s i n e y c o s e x s i n e y s i n e z − c o s e z s i n e x c o s e x c o s e z s i n e y + s i n e x s i n e z c o s e x c o s e y ] R=\left[\begin{array}{ccc}{cos_{ex} cos_{ez}+sin_{ex} sin_{ey} sin_{ez}} & {cos_{ez} sin_{ex} sin_{ey}-cos_{ex} sin_{ez}} & {cos_{ey} sin_{ex}} \\ {cos_{ey} sin_{ez}} & {cos_{ey} cos_{ez}} & {-sin_{ey}} \\ {cos_{ex} sin_{ey} sin_{ez}-cos_{ez} sin_{ex}} & {cos_{ex} cos_{ez} sin_{ey}+sin_{ex} sin_{ez}} & {cos_{ex} cos_{ey}}\end{array}\right] R=⎣⎡cosexcosez+sinexsineysinezcoseysinezcosexsineysinez−cosezsinexcosezsinexsiney−cosexsinezcoseycosezcosexcosezsiney+sinexsinezcoseysinex−sineycosexcosey⎦⎤
平移:
t = [ t x t y t z ] t=\left[ \begin{array}{ccc} t_{x} \\ t_{y} \\ t_{z}\end{array} \right] t=⎣⎡txtytz⎦⎤
LMOptimization中如何进行优化迭代计算
先明确优化函数中的优化目标
优化函数优化的量是特征点与对应直线的距离(或者特征点与特征平面的距离)。
按照最优的情况下来说,特征点应该是在特征直线(或者特征平面)上的,所以距离应该为0.
但是当特征点到直线或者平面的距离不为0的时候,说明这个点由于运动产生了畸变,我们一开始估计的旋转 R R R和平移 T T T估计得不准确。所以对这个旋转和平移要进行调整。也就是每次优化后进行的如下操作:
transformTobeMapped[0] += matX.at(0, 0);
transformTobeMapped[1] += matX.at(1, 0);
transformTobeMapped[2] += matX.at(2, 0);
transformTobeMapped[3] += matX.at(3, 0);
transformTobeMapped[4] += matX.at(4, 0);
transformTobeMapped[5] += matX.at(5, 0);
其中的变换涉及到对旋转矩阵求雅克比,对距离求导等。
先明确一下优化中涉及到的定义
1.局部坐标系中的点
(LM-a) X ( k + 1 , i ) L = ( p x , p y , p z ) T X_{(k+1, i)}^{L}=(p x, p y, p z)^{T} \tag{LM-a} X(k+1,i)L=(px,py,pz)T(LM-a)
这里的点是特征点,边缘上的点或者平面上的点,点i在LiDAR坐标系下,k+1时刻的坐标.
2.变换 T ( k + 1 ) w T_{(k+1)}^{w} T(k+1)w表示特征点经过这个变换内包含的3个旋转个3个平移,可以准确地变换到全局地图中,与地图中特征边缘和平面的距离为0;
3.将从局部坐标系变换到全局地图坐标系的变换定义成一个函数 G ( . ) G( .) G(.)这个函数将局部点 X ( k + 1 , i ) L X^{L}_{(k+1, i)} X(k+1,i)L转换到全局点 X ( k + 1 , i ) w X_{(k+1, i)}^{w} X(k+1,i)w。
(LM-b) X ( k + 1 , i ) w = G ( X ( k + 1 , i ) L , T ( k + 1 ) w ) = R ⋅ X ( k + 1 , i ) L + t X_{(k+1, i)}^{w}=G\left(X_{(k+1, i)}^{L}, T_{(k+1)}^{w}\right)=R \cdot X_{(k+1, i)}^{L}+t \tag{LM-b} X(k+1,i)w=G(X(k+1,i)L,T(k+1)w)=R⋅X(k+1,i)L+t(LM-b)
4.定义误差
(LM-c) loss = d = D ( X ( k + 1 , i ) w , m a p ) \text {loss}=d=D\left(X_{(k+1, i)}^{w}, map\right) \tag{LM-c} loss=d=D(X(k+1,i)w,map)(LM-c)
结合公式LM-b,LM-c
(LM-d) l o s s = d = D ( X ( k + 1 , i ) w , m a p ) = D ( G ( X ( k + 1 , i ) L , T ( k + 1 ) w ) , m a p ) = D ( R ⋅ X ( k + 1 , i ) L + t , m a p ) \begin{aligned} & loss=d=D\left(X_{(k+1, i)}^{w}, map\right) \\ & =D\left(G\left(X_{(k+1, i)}^{L}, T_{(k+1)}^{w}\right), map\right) \\ & =D\left(R \cdot X_{(k+1, i)}^{L}+t, map\right) \\ \end{aligned} \tag{LM-d} loss=d=D(X(k+1,i)w,map)=D(G(X(k+1,i)L,T(k+1)w),map)=D(R⋅X(k+1,i)L+t,map)(LM-d)
5.误差对旋转求偏导的过程
(LM-e) ∂ loss ∂ e x = ∂ D ( G ( X ( k + 1 , i ) L , T ( k + 1 ) w ) , m a p ) ∂ e x = ∂ D ( . ) ∂ G ( . ) ⋅ ∂ G ( . ) ∂ e x = ∂ D ( . ) ∂ G ( . ) ⋅ ∂ ( R ⋅ X ( k + 1 , 1 ) L + t ) ∂ e x = ∂ D ( . ) ∂ G ( . ) ⋅ ∂ ( R ⋅ X ( k + 1 , i ) L ) ∂ e x + ∂ D ( . ) ∂ G ( . ) ⋅ ∂ ( t ) ∂ e x = ∂ D ( . ) ∂ G ( . ) ⋅ ∂ ( R ⋅ X ( k + 1 , i ) L ) ∂ e x \begin{array}{c} {\frac{\partial \operatorname{loss}}{\partial e x}=\frac{\partial D\left(G\left(X_{(k+1, i)}^{L}, T_{(k+1)}^{w}\right), map\right)}{\partial e x}} \\ {=\frac{\partial D( .)}{\partial G( .)} \cdot \frac{\partial G( .)}{\partial e x}}\\ {=\frac{\partial D( .)}{\partial G( .)} \cdot \frac{\partial\left(R \cdot X_{(k+1,1)}^{L}+t\right)}{\partial e x}}\\ {=\frac{\partial D( .)}{\partial G( .)} \cdot \frac{\partial\left(R \cdot X_{(k+1, i)}^{L}\right)}{\partial e x}+\frac{\partial D( .)}{\partial G( .)} \cdot \frac{\partial(t)}{\partial e x}} \\ {=\frac{\partial D( .)}{\partial G( .)} \cdot \frac{\partial\left(R \cdot X_{(k+1, i)}^{L}\right)}{\partial e x}} \end{array} \tag{LM-e} ∂ex∂loss=∂ex∂D(G(X(k+1,i)L,T(k+1)w),map)=∂G(.)∂D(.)⋅∂ex∂G(.)=∂G(.)∂D(.)⋅∂ex∂(R⋅X(k+1,1)L+t)=∂G(.)∂D(.)⋅∂ex∂(R⋅X(k+1,i)L)+∂G(.)∂D(.)⋅∂ex∂(t)=∂G(.)∂D(.)⋅∂ex∂(R⋅X(k+1,i)L)(LM-e)
6.误差对平移求偏导的过程
(LM-f) ∂ loss ∂ x = ∂ D ( G ( X ( k + 1 , i ) L , T ( k + 1 ) w ) , m a p ) ∂ x = ∂ D ( . ) ∂ G ( . ) ⋅ ∂ G ( . ) ∂ x = ∂ D ( . ) ∂ G ( . ) ⋅ ∂ ( R ⋅ X ( k + 1 , 1 ) L + t ) ∂ x = ∂ D ( . ) ∂ G ( . ) ⋅ ∂ ( R ⋅ X ( k + 1 , i ) L ) ∂ x + ∂ D ( . ) ∂ G ( . ) ⋅ ∂ ( t ) ∂ x = 0 + ∂ D ( . ) ∂ G ( . ) ⋅ ∂ ( t ) ∂ x = ∂ D ( . ) ∂ G ( . ) \begin{array}{c} {\frac{\partial \operatorname{loss}}{\partial x}=\frac{\partial D\left(G\left(X_{(k+1, i)}^{L}, T_{(k+1)}^{w}\right), map\right)}{\partial x}} \\ {=\frac{\partial D( .)}{\partial G( .)} \cdot \frac{\partial G( .)}{\partial x}}\\ {=\frac{\partial D( .)}{\partial G( .)} \cdot \frac{\partial\left(R \cdot X_{(k+1,1)}^{L}+t\right)}{\partial x}}\\ {=\frac{\partial D( .)}{\partial G( .)} \cdot \frac{\partial\left(R \cdot X_{(k+1, i)}^{L}\right)}{\partial x}+\frac{\partial D( .)}{\partial G( .)} \cdot \frac{\partial(t)}{\partial x}} \\ {=0+\frac{\partial D( .)}{\partial G( .)} \cdot \frac{\partial(t)}{\partial x}} \\ {=\frac{\partial D( .)}{\partial G( .)}} \end{array} \tag{LM-f} ∂x∂loss=∂x∂D(G(X(k+1,i)L,T(k+1)w),map)=∂G(.)∂D(.)⋅∂x∂G(.)=∂G(.)∂D(.)⋅∂x∂(R⋅X(k+1,1)L+t)=∂G(.)∂D(.)⋅∂x∂(R⋅X(k+1,i)L)+∂G(.)∂D(.)⋅∂x∂(t)=0+∂G(.)∂D(.)⋅∂x∂(t)=∂G(.)∂D(.)(LM-f)
6. ∂ D ( ⋅ ) ∂ G ( ⋅ ) \frac{\partial D(\cdot)}{\partial G(\cdot)} ∂G(⋅)∂D(⋅)的求解
(LM-g) ∂ D ( . ) ∂ G ( . ) = ∂ d ( ∂ X ( ( k + 1 , i ) ) w ) \frac{\partial D( .)}{\partial G( .)}=\frac{\partial d}{\left(\partial X_{((k+1, i))}^{w}\right)} \tag{LM-g} ∂G(.)∂D(.)=(∂X((k+1,i))w)∂d(LM-g)
公式LM-g中对全局坐标系中的点求导,可以理解成求一个全局点的移动方向,点在这个方向上移动, d d d减小得最快。
所以这个方向就是沿着垂线的方向。
所以点到直线的方向就是底边的垂线方向。
点到平面的方向就是平面的法线方向。
∂ D ( . ) ∂ G ( . ) = ∂ d ( ∂ X ( ( k + 1 , i ) ) w ) = ( ∂ d ∂ x , ∂ d ∂ y , ∂ d ∂ z ) = ( l a , l b , l c ) \frac{\partial D( .)}{\partial G( .)}=\frac{\partial d}{\left(\partial X_{((k+1, i))}^{w}\right)}=\left(\frac{\partial d}{\partial x},\frac{\partial d}{\partial y},\frac{\partial d}{\partial z}\right)=(la,lb,lc) ∂G(.)∂D(.)=(∂X((k+1,i))w)∂d=(∂x∂d,∂y∂d,∂z∂d)=(la,lb,lc)
所以总结一下上面求解的两个部分:
(LM-h) ∂ ( R ∗ X ( k + 1 , i ) L ) ∂ e x = ∂ ( R ) ∂ e x ⋅ X ( k + 1 , i ) L = ∂ ( R ) ∂ e x ⋅ ( p x , p y , p z ) T = [ s y ⋅ c x ⋅ s z c z ⋅ s y ⋅ c x − s x ⋅ s y − s x ⋅ s z − s x ⋅ c z − c x c y ⋅ c x ⋅ s z c y ⋅ c z ⋅ c x − c y ⋅ s x ] ⋅ ( p x , p y , p z ) T \begin{aligned} &\frac{\partial\left(R * X_{(k+1, i)}^{L}\right)}{\partial e x}=\frac{\partial\left(R \right)}{\partial e x}\cdot X_{(k+1, i)}^{L} \\ & =\frac{\partial\left(R \right)}{\partial e x}\cdot \left( p_x,p_y,p_z \right)^{T} \\ & =\left[\begin{array}{ccc}{sy \cdot cx \cdot sz} & {cz \cdot sy \cdot cx} & {-sx \cdot sy} \\ {-sx \cdot sz} & {-sx \cdot cz} & {-cx} \\ {cy \cdot cx \cdot sz} & {cy \cdot cz \cdot cx} & {-cy \cdot sx}\end{array}\right] \cdot \left( p_x,p_y,p_z\right)^T \end{aligned} \tag{LM-h} ∂ex∂(R∗X(k+1,i)L)=∂ex∂(R)⋅X(k+1,i)L=∂ex∂(R)⋅(px,py,pz)T=⎣⎡sy⋅cx⋅sz−sx⋅szcy⋅cx⋅szcz⋅sy⋅cx−sx⋅czcy⋅cz⋅cx−sx⋅sy−cx−cy⋅sx⎦⎤⋅(px,py,pz)T(LM-h)
同样的做法可以求得
∂ ( R × X ( k + 1 , i ) L ) ∂ e y \frac{\partial\left(R \times X_{(k+1, i)}^{L}\right)}{\partial e y} ∂ey∂(R×X(k+1,i)L)
以及
∂ ( R × X ( k + 1 , i ) L ) ∂ e z \frac{\partial\left(R \times X_{(k+1, i)}^{L}\right)}{\partial e z} ∂ez∂(R×X(k+1,i)L)
,分别对应于代码中的ary和arz。
迭代计算的过程
代码中用的是高斯-牛顿法进行迭代计算求解的。
高斯-牛顿法的基本形式为:
J T J Δ x = − J ⋅ f ( x ) J^{T}J \Delta{x}=-J \cdot f(x) JTJΔx=−J⋅f(x)
代码中,雅克比矩阵 J J J为matA,
(matA) m a t A = [ ∂ d ∂ r o l l ∂ d ∂ p i t c h ∂ d ∂ y a w ∂ d ∂ t x ∂ d ∂ t y ∂ d ∂ t z ] matA=\left[\begin{array}{ccc} {\frac{\partial{d}}{\partial{roll}}} \\ {\frac{\partial{d}}{\partial{pitch}}} \\ {\frac{\partial{d}}{\partial{yaw}}} \\ {\frac{\partial{d}}{\partial{t_x}}} \\ {\frac{\partial{d}}{\partial{t_y}}} \\ {\frac{\partial{d}}{\partial{t_z}}} \\ \end{array} \right] \tag{matA} matA=⎣⎢⎢⎢⎢⎢⎢⎢⎡∂roll∂d∂pitch∂d∂yaw∂d∂tx∂d∂ty∂d∂tz∂d⎦⎥⎥⎥⎥⎥⎥⎥⎤(matA)
transformFusion中的数学公式
To be continued.
参考文献及链接
1.苦力笨笨的博客:https://www.cnblogs.com/terencezhou/p/6235974.html
2.知乎SLAM专栏-「能儿」的回答:https://zhuanlan.zhihu.com/p/57351961
3.mathworld.wolfram.com:http://mathworld.wolfram.com/RotationMatrix.html
4.维基百科旋转矩阵解释:https://en.wikipedia.org/wiki/Euler_angles#Definition_by_intrinsic_rotations