Faster RCNN网络源码解读(Ⅸ) --- ROIAlign、TwoMLPHead、FastRCNNPredictor部分解析
目录
一、回顾以及本篇博客内容概述
二、代码解析
2.1 FasterRCNNBase类
2.1.1 forward正向传播
2.2 FasterRCNN类
2.2.1 roi_heads定义
2.3 TwoMLPHead类(faster_rcnn_framework.py)
2.4 FastRCNNPredictor类
2.5 RoIHeads类(roi_head.py)
2.5.1 初始化函数 __init__
2.5.2 正向传播forward
一、回顾以及本篇博客内容概述
在之前的博客中,我们生成了自己的数据集(Dataset)、数据的预处理模块(将图片组成一个尺寸大小都相同的一个batch)、通过特征提取网络Backbone将图片处理成特征图、通过RPN网络计算RPN损失。接下来我们讲述ROIAlign、TwoMLPHead、FastRCNNPredictor部分。

二、代码解析
2.1 FasterRCNNBase类
2.1.1 forward正向传播
#注意:这里输入的images的大小都是不同的。后面会进行预处理将这些图片放入同样大小的tensor中打包成一个batch #正向传播过程 params :预测的图片,为List[Tensor]型 #image和target我们再word上面有标注 def forward(self, images, targets=None): # type: (List[Tensor], Optional[List[Dict[str, Tensor]]]) -> Tuple[Dict[str, Tensor], List[Dict[str, Tensor]]] """ Arguments: images (list[Tensor]): images to be processed targets (list[Dict[Tensor]]): ground-truth boxes present in the image (optional) Returns: result (list[BoxList] or dict[Tensor]): the output from the model. During training, it returns a dict[Tensor] which contains the losses. During testing, it returns list[BoxList] contains additional fields like `scores`, `labels` and `mask` (for Mask R-CNN models). """ #判断是否是训练模式,若是训练模式一定要有targets,若targets为空,抛出异常 if self.training and targets is None: raise ValueError("In training mode, targets should be passed") #检查标注框是否有错误 if self.training: assert targets is not None for target in targets: # 进一步判断传入的target的boxes参数是否符合规定 boxes = target["boxes"] #判断boxes是不是torch.Tensor的格式 if isinstance(boxes, torch.Tensor): #shape对应的目标有几个,毕竟一个目标就对应一个边界框嘛 #box的第一个维度是N表示图像中有几个边界框 第二个维度是4(xminxmax..) #即如果最后一个维度!=4也要报错 if len(boxes.shape) != 2 or boxes.shape[-1] != 4: raise ValueError("Expected target boxes to be a tensor" "of shape [N, 4], got {:}.".format( boxes.shape)) else: raise ValueError("Expected target boxes to be of type " "Tensor, got {:}.".format(type(boxes))) #存储每张图片的原始尺寸 定义是个List类型 每个list又是个元组类型 元组里面存放着图片的长宽 original_image_sizes = torch.jit.annotate(List[Tuple[int, int]], []) for img in images: #对每张图片取得最后两个元素,再pytorch中维度的排列为[channel,height,width] val = img.shape[-2:] assert len(val) == 2 # 防止输入的是个一维向量 original_image_sizes.append((val[0], val[1])) # original_image_sizes = [img.shape[-2:] for img in images] #GeneralizedRCNNTransform 函数 png的第二步(标准化处理、resize大小) #现在的image和targets才是真正的batch 我们在输入之前都是一张张尺寸大小不一样的图片,我们这样是没有办法打包成一个batch输入到gpu中进行运算的 images, targets = self.transform(images, targets) # 对图像进行预处理 # print(images.tensors.shape) features = self.backbone(images.tensors) # 将图像输入backbone得到特征图 #判断特征图是否是tensor类型的,对于上面的图片是img和target型的 但是我们经过backbone后就得到了一个个的特征图(仅有图) if isinstance(features, torch.Tensor): # 若只在一层特征层上预测,将feature放入有序字典中,并编号为‘0’ #将特征图加入有序字典 key=0 features = OrderedDict([('0', features)]) # 若在多层特征层上预测,传入的就是一个有序字典 # 将特征层以及标注target信息传入rpn中 # proposals: List[Tensor], Tensor_shape: [num_proposals, 4],是一个绝对坐标 # 每个proposals是绝对坐标,且为(x1, y1, x2, y2)格式 #proposal是一个list大小为2(batch_size)是2 每个元素是个tensor,对于每个list而言是个tensor 2000*4 2000代表rpn生成有2000个proposal proposals, proposal_losses = self.rpn(images, features, targets) # 将rpn生成的数据以及标注target信息传入fast rcnn后半部分 detections, detector_losses = self.roi_heads(features, proposals, images.image_sizes, targets) # 对网络的预测结果进行后处理(主要将bboxes还原到原图像尺度上) detections = self.transform.postprocess(detections, images.image_sizes, original_image_sizes) losses = {} losses.update(detector_losses) losses.update(proposal_losses) if torch.jit.is_scripting(): if not self._has_warned: warnings.warn("RCNN always returns a (Losses, Detections) tuple in scripting") self._has_warned = True return losses, detections else: return self.eager_outputs(losses, detections)之前我们以及说过了数据的预处理:
images, targets = self.transform(images, targets) # 对图像进行预处理将打包好的数据输入到backbone特征提取网络生成特征图:
features = self.backbone(images.tensors) # 将图像输入backbone得到特征图将图片、特征和标注数据送入RPN网络计算RPN损失和proposal。
proposals, proposal_losses = self.rpn(images, features, targets)我们需要注意的是,这里的proposal生成的是一个list列表,列表中的每一个元素都是tensor类型的,tensor的shape是
。
接着我们讲述本次的内容:先来看roi_heads部分:
detections, detector_losses = self.roi_heads(features, proposals, images.image_sizes, targets)

2.2 FasterRCNN类
2.2.1 roi_heads定义
# 将roi pooling, box_head以及box_predictor结合在一起 roi_heads = RoIHeads( # box box_roi_pool, box_head, box_predictor, box_fg_iou_thresh, box_bg_iou_thresh, # 0.5 0.5 box_batch_size_per_image, box_positive_fraction, # 512 0.25 在每张图片当中会选取多少个proposal用来计算fastrcnn的损失 bbox_reg_weights, box_score_thresh, box_nms_thresh, box_detections_per_img) # 0.05 0.5 100我们传入了很多参数。首先是box_roi_pool,我们在上面可以找到它的定义。
if box_roi_pool is None: box_roi_pool = MultiScaleRoIAlign( featmap_names=['0', '1', '2', '3'], # 在哪些特征层进行roi pooling output_size=[7, 7], sampling_ratio=2)其实就是一个MultiScaleRoIAlign,对应的就是上图中的ROIPolling。这里使用的RoIAlign比RoIPooling更准确些(定位效果更好)。
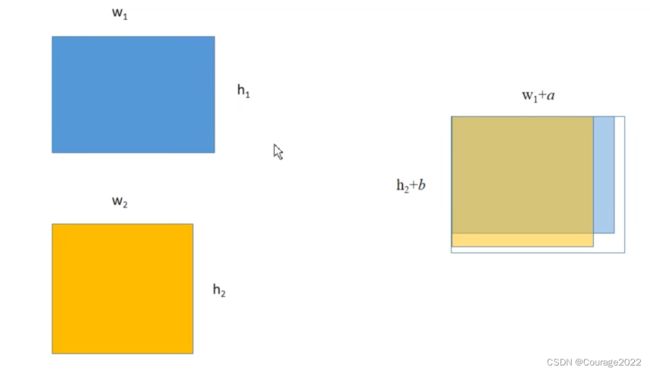
底层这里我们不说,因为已经跳到了torchvision源码中了,这个RoIAlign层的目的就是将在指定的特征层featmap_names的proposal进行卷积操作得到output_size大小的特征矩阵。其channel不变。
即
-->
的特征矩阵。
第二个参数是box_head,我们在上面可以找到它的定义。
# fast RCNN中roi pooling后的展平处理两个全连接层部分 # out_channels 通过展平之后所拥有的节点个数 由于我们通过proposal通过ROIAlaign之后得到的是一个shape固定的特征矩阵,矩阵的faeatures的通道数=out_channels # 特征矩阵的output_size=[7, 7], 因此展平之后的节点个数是out_channels*7*7,第二个参数是全连接层1的节点个数 if box_head is None: resolution = box_roi_pool.output_size[0] # 默认等于7 representation_size = 1024 box_head = TwoMLPHead( out_channels * resolution ** 2, representation_size )对应我们上述流程图的Two MLPHead部分,进行展平操作依次通过两个全连接层。
我们传入两个参数:
参数一:通过展平操作后对应的节点个数:由于我们的proposal通过RoIAlign过后我们得到的是一个shape固定的特征矩阵,因此我们特征矩阵的channel是out_channels 。
这里的channel是backbone过后的channel,backbone的channel和特征矩阵的channel是一个channel。
# 预测特征层的channels out_channels = backbone.out_channels我们得到的特征矩阵的长和宽都是
的(output_size=[7, 7]),因此它对应的节点个数就是out_channels * resolution ** 2。
参数二:FC1/FC2的节点个数 = 1024。
TwoMLPHead类的解析在2.3节中。
其输出的变量
是
维的向量。
第一个1024对应着一个batch有两张图片,一张图片有512个proposal,第二个1024代表着第二个全连接层FC2的节点个数。
第三个是box_predictor,它其实就是个FastRCNNPredictor。
# 在box_head的输出上预测部分 #并联两个全连接层 一个全连接层并联(一个全连接层用于预测每个proposal的类别分数)(一个全连接层用于预测每个proposal的边界框回归参数) if box_predictor is None: representation_size = 1024 box_predictor = FastRCNNPredictor( representation_size, num_classes) #加上背景21FastRCNNPredictor类的解析在2.4节中。其实就是将Two MLPHead的输出结果并行的接上两个全连接层,一个全连接层用于预测每一个proposal的类别分数(num_classes = 21),另一个全连接层用于预测每个proposal的边界框回归参数。
第四个是box_fg_iou_thresh, box_bg_iou_thresh, # 0.5 0.5,对应着匹配正负样本时如果proposal和groundtruth的IoU值大于box_fg_iou_thresh认为是正样本,小于box_bg_iou_thresh对应负样本。
第五个是box_batch_size_per_image, box_positive_fraction, # 512 0.25 在每张图片当中会选取多少个proposal用来计算fastrcnn的损失。
第六个是box_score_thresh, box_nms_thresh, box_detections_per_img) # 0.05 0.5 100,对应后处理时所应用的阈值。
2.3 TwoMLPHead类(faster_rcnn_framework.py)
class TwoMLPHead(nn.Module): """ Standard heads for FPN-based models Arguments: in_channels (int): number of input channels representation_size (int): size of the intermediate representation """ #定义两个全连接层 def __init__(self, in_channels, representation_size): super(TwoMLPHead, self).__init__() #in_channels = outputchannel 即roi层展平的个数 self.fc6 = nn.Linear(in_channels, representation_size) self.fc7 = nn.Linear(representation_size, representation_size) def forward(self, x): #展平 1024(batch整个proposal的个数 batchzize=2的,由于训练的时候我们只取rpn给的2000个中的512个proposal)256(channel) 7 7 x = x.flatten(start_dim=1) #1024 * 12544 x = F.relu(self.fc6(x)) x = F.relu(self.fc7(x)) return x在初始化函数中我们定义了两个全连接层。
第一个全连接层的维度大小即经过展平后的特征矩阵的大小,输出大小为1024。
第二个全连接层的维度大小为1024,输出大小为1024。
在正向传播过程中:
这里的
1024是整个batch的整个的proposal的个数,这里的训练脚本的batchsize = 2,训练的时候只取了RPN给的2000个proposal中的512个proposal,当然两张图片加起来就是1024个proposal,每个proposal经过backbone输出channels等于256,宽度7高度7。
依次通过两个全连接层就得到了输出

2.4 FastRCNNPredictor类
#全连接层 输入的是全连接层的输出1024 class FastRCNNPredictor(nn.Module): """ Standard classification + bounding box regression layers for Fast R-CNN. Arguments: in_channels (int): number of input channels num_classes (int): number of output classes (including background) """ def __init__(self, in_channels, num_classes): super(FastRCNNPredictor, self).__init__() self.cls_score = nn.Linear(in_channels, num_classes) self.bbox_pred = nn.Linear(in_channels, num_classes * 4) def forward(self, x): #默认不满足 if x.dim() == 4: assert list(x.shape[2:]) == [1, 1] x = x.flatten(start_dim=1) #1024* 21 scores = self.cls_score(x) #1024 84 bbox_deltas = self.bbox_pred(x) return scores, bbox_deltas类的初始化定义了两个全连接层,用于预测目标分数和边界框回归参数。
第一个全连接层输入channel为1024,输出channel为21。
第二个全连接层输入channel为1024,输出channel为84。
第一个1024对应着一个batch有两张图片,一张图片有512个proposal,第二个1024代表着第二个全连接层FC2的节点个数。
将结果分别传给两个预测器得到预测结果。



2.5 RoIHeads类(roi_head.py)
2.5.1 初始化函数 __init__
def __init__(self, box_roi_pool, # Multi-scale RoIAlign pooling box_head, # TwoMLPHead box_predictor, # FastRCNNPredictor # Faster R-CNN training fg_iou_thresh, bg_iou_thresh, # default: 0.5, 0.5 batch_size_per_image, positive_fraction, # default: 512, 0.25 bbox_reg_weights, # None # Faster R-CNN inference score_thresh, # default: 0.05 nms_thresh, # default: 0.5 detection_per_img): # default: 100 super(RoIHeads, self).__init__() #计算IoU的方法 self.box_similarity = box_ops.box_iou # assign ground-truth boxes for each proposal #将proposal划分为正负样本中 self.proposal_matcher = det_utils.Matcher( fg_iou_thresh, # default: 0.5 bg_iou_thresh, # default: 0.5 allow_low_quality_matches=False) #对于划分的正负样本进行采样 self.fg_bg_sampler = det_utils.BalancedPositiveNegativeSampler( batch_size_per_image, # default: 512 positive_fraction) # default: 0.25 if bbox_reg_weights is None: bbox_reg_weights = (10., 10., 5., 5.) self.box_coder = det_utils.BoxCoder(bbox_reg_weights) self.box_roi_pool = box_roi_pool # Multi-scale RoIAlign pooling self.box_head = box_head # TwoMLPHead self.box_predictor = box_predictor # FastRCNNPredictor self.score_thresh = score_thresh # default: 0.05 self.nms_thresh = nms_thresh # default: 0.5 self.detection_per_img = detection_per_img # default: 100
简单的对我们2.2.1节的参数进行了类内初始化。
self.proposal_matcher = det_utils.Matcher( fg_iou_thresh, # default: 0.5 bg_iou_thresh, # default: 0.5 allow_low_quality_matches=False)这个是将proposal划分到正负样本中。
self.fg_bg_sampler = det_utils.BalancedPositiveNegativeSampler( batch_size_per_image, # default: 512 positive_fraction) # default: 0.25这个是将正负样本进行采样。
2.5.2 正向传播forward
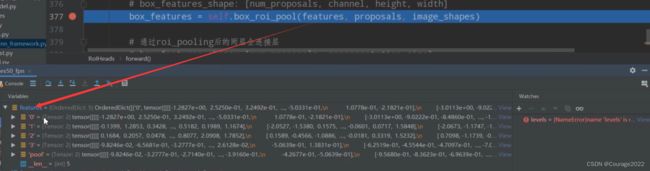
#参数:features特征图,proposals框体的坐标,image_shapes图片经过预处理后的大小,targets真实目标的标注信息 def forward(self, features, # type: Dict[str, Tensor] proposals, # type: List[Tensor] image_shapes, # type: List[Tuple[int, int]] targets=None # type: Optional[List[Dict[str, Tensor]]] ): # type: (...) -> Tuple[List[Dict[str, Tensor]], Dict[str, Tensor]] """ Arguments: features (List[Tensor]) proposals (List[Tensor[N, 4]]) image_shapes (List[Tuple[H, W]]) targets (List[Dict]) """ # 检查targets的数据类型是否正确 if targets is not None: for t in targets: floating_point_types = (torch.float, torch.double, torch.half) assert t["boxes"].dtype in floating_point_types, "target boxes must of float type" assert t["labels"].dtype == torch.int64, "target labels must of int64 type" if self.training: # 划分正负样本,统计对应gt的标签以及边界框回归信息 #在我们的rpn输出时会提供2000个proposal,但在我们的训练过程中我们只需要从中采样512个就够了 proposals, labels, regression_targets = self.select_training_samples(proposals, targets) #不是训练模式生成1000个proposal rpn_post_nms_top_n_test=1000 else: labels = None regression_targets = None # 将采集样本通过Multi-scale RoIAlign pooling层 # box_features_shape: [num_proposals, channel, height, width] #这里的box_roi_pool就是我们所说的ros_alain 通过它就能将我们的proposal处理到我们所指定的大小当中 #features由于我们在多个特征层上预测,因此features有五个预测特征层 #box_features 1024 256 7 7 两张图片,一张照片512个proposal,每一个proposal经过ros_alain后得到一个256 7 7大小的特征矩阵 box_features = self.box_roi_pool(features, proposals, image_shapes) # 通过roi_pooling后的两层全连接层 TwoMLPHead # box_features_shape: [num_proposals, representation_size] 1024 1024 box_features = self.box_head(box_features) # 接着分别预测目标类别和边界框回归参数 1024 21 1024 84 class_logits, box_regression = self.box_predictor(box_features) #空列表空字典 result = torch.jit.annotate(List[Dict[str, torch.Tensor]], []) losses = {} #训练模式记录,计算fastrcnn部分的损失 if self.training: assert labels is not None and regression_targets is not None loss_classifier, loss_box_reg = fastrcnn_loss( class_logits, box_regression, labels, regression_targets) losses = { "loss_classifier": loss_classifier, "loss_box_reg": loss_box_reg } #验证模式对预测结果进行后处理 #验证模式不会进行正负样本划分及采样过程,预测过程中直接使用rpn所有的proposal进行预测,预测的时候rpn只会提供1000个proposal else: boxes, scores, labels = self.postprocess_detections(class_logits, box_regression, proposals, image_shapes) num_images = len(boxes) for i in range(num_images): result.append( { "boxes": boxes[i], "labels": labels[i], "scores": scores[i], } ) return result, losses这里的参数:
@features:特征图,经过backbone模块后得到的部分
@proposals:RPN生成的proposals
@image_shapes:在预处理之后图像所得到的shape,即经过等比例缩放后的图片的高度宽度大小。不是打包成batch的大小!
@targets:真实目标的标注信息
if self.training: # 划分正负样本,统计对应gt的标签以及边界框回归信息 #在我们的rpn输出时会提供2000个proposal,但在我们的训练过程中我们只需要从中采样512个就够了 proposals, labels, regression_targets = self.select_training_samples(proposals, targets) #不是训练模式生成1000个proposal rpn_post_nms_top_n_test=1000 else: labels = None regression_targets = None如果是训练模式,我们用select_training_samples方法选取我们使用的样本,我们回忆一下,在RPN输出时会提供2000个proposal,但我们在训练过程中只需要采样512个样本就够了,因此在训练过程中我们会进一步采样;如果不是训练模式(验证模式),RPN只会生成1000个proposal。
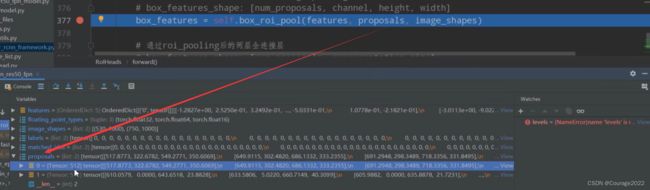
# 将采集样本通过Multi-scale RoIAlign pooling层 # box_features_shape: [num_proposals, channel, height, width] #这里的box_roi_pool就是我们所说的ros_alain 通过它就能将我们的proposal处理到我们所指定的大小当中 #features由于我们在多个特征层上预测,因此features有五个预测特征层 #box_features 1024 256 7 7 两张图片,一张照片512个proposal,每一个proposal经过ros_alain后得到一个256 7 7大小的特征矩阵 box_features = self.box_roi_pool(features, proposals, image_shapes)将我们的features, proposals, image_shapes传给box_roi_pool,这里的box_roi_pool就是我们说的ROIAlign,通过这个函数可以将我们的proposal处理到指定的大小当中。
这里的features是通过backbone所得到的特征矩阵features。(FPN结构5个特征层)
这里的proposals是经过筛选之后对于每张图片只保留了512个proposal。
这里的image_shapes是每张图片缩放之后对应的尺寸。
我们得到的box_features如下:
1024对应着两张图片,一张图片中含有512个proposal。每个proposal经过RoIAlign后变成256*7*7大小的特征矩阵了。
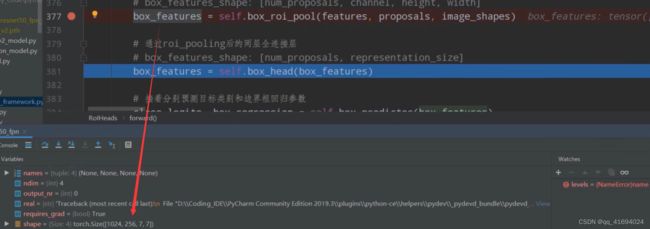
# 通过roi_pooling后的两层全连接层 TwoMLPHead # box_features_shape: [num_proposals, representation_size] 1024 1024 box_features = self.box_head(box_features)这里的BoxHead对应的图中Two MLPHead部分。
现在我们的box_features是1024*1024的。
我们再将我们所得的box_features传给box_predictor。对应图中的FastRCNNPreDictor部分。
# 接着分别预测目标类别和边界框回归参数 1024 21 1024 84 class_logits, box_regression = self.box_predictor(box_features)
对于每个proposal,都会预测21种类别的概率。
对于每个proposal,都会预测21种类别每个类别的四个坐标参数。
我们定义了空列表和空字典:
#空列表空字典 result = torch.jit.annotate(List[Dict[str, torch.Tensor]], []) losses = {}对于训练模式下计算fastrcnn部分的损失。
if self.training: assert labels is not None and regression_targets is not None loss_classifier, loss_box_reg = fastrcnn_loss( class_logits, box_regression, labels, regression_targets) losses = { "loss_classifier": loss_classifier, "loss_box_reg": loss_box_reg对于验证模式下,对于预测的结果进行后处理:
#验证模式对预测结果进行后处理 #验证模式不会进行正负样本划分及采样过程,预测过程中直接使用rpn所有的proposal进行预测,预测的时候rpn只会提供1000个proposal else: boxes, scores, labels = self.postprocess_detections(class_logits, box_regression, proposals, image_shapes) num_images = len(boxes) for i in range(num_images): result.append( { "boxes": boxes[i], "labels": labels[i], "scores": scores[i], } )即低概率目标筛选掉、nms处理等等。这块下篇博客讲述!